基于图像分割匹配的赛道元素识别算法
2019-12-11吴绪辉潘璇峰邓伟杰
吴绪辉 潘璇峰 邓伟杰
摘 要:智能汽车竞赛的赛题难度与工程应用性能在不断提升,赛道元素日益增多且赛道类型逐渐多样,其识别难度随之增大,以赛道边界线斜率、曲率和图像中黑白跳变等信息为依据的传统赛道识别方法已无法适用于复杂的赛道情况。因此,通过对赛道图像进行矩阵分析和图像特征统计分析,提出一种基于图像分割匹配的赛道元素识别算法。首先对图像进行矩阵分割,统计并提取各子图像特征建立模板,然后对目标图像的灰度平均值和方差进行匹配、近似值分析。经实际对比测试,新算法的识别准确率高、程序可移植性强,具有良好的应用价值。
关键词:图像分割;特征分析;图像匹配;赛道元素;智能汽车竞赛;赛道识别
中图分类号:TP39文献标识码:A文章编号:2095-1302(2019)11-00-03
0 引 言
近年来,智能汽车技术迅猛发展,它是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,是典型的高新技术综合体,具有重要的军用及民用价值。因此,智能汽车竞赛也越来越受重视。智能汽车的核心部分是赛道元素识别、方向和速度控制,精准的赛道元素识别算法是方向和速度控制的基础和前提[1]。为此,本文提出一种基于图像分割匹配的赛道元素识别算法,以实现对赛道元素的精准识别。
1 传统智能汽车赛道识别的现状
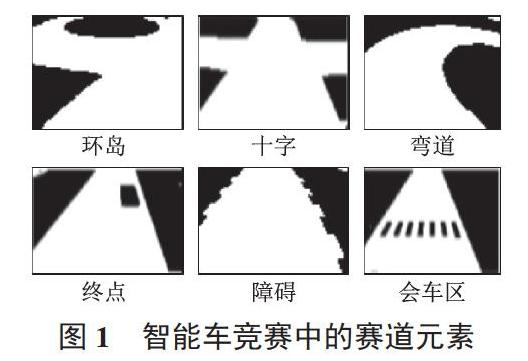
如图1所示,智能汽车竞赛的赛道元素主要有环岛、十字、弯道、终点线、路障和会车区。传统的赛道识别算法一般是以赛道边界线斜率、曲率和图像中黑白跳变等信息为依据进行赛道元素的区分识别,每种赛道类型都需要对应特定的识别算法。传统的赛道识别方法存在以下缺点:
(1)赛道边界线斜率和曲率一般由图像多个点的坐标获得,一旦赛道边界线上存在噪点,便会严重影响边界斜率和曲率[2];
(2)每种赛道类型都需要特定的识别算法,赛道元素识别算法不能复用,程序代码过于冗余,会消耗主控芯片过多的运算资源,最终导致识别时间过长[3-4]。
2 数字图像处理基本方法
2.1 数字图像的矩阵分割
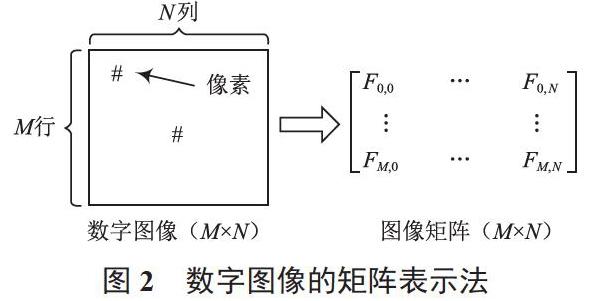
数字图像数据一般用数组形式进行存储,而数组与矩阵之间存在密切的关联,因此数字图像可以用矩阵方式来表示,并且可以采用矩阵理论和矩阵算法对数字图像进行分析和处理。如图2所示,图像的像素数据是一个矩阵,矩阵的行对应图像的高,矩阵的列对应图像的宽,矩阵的元素对应图像的像素,矩阵元素的值即为像素的灰度值[5]。
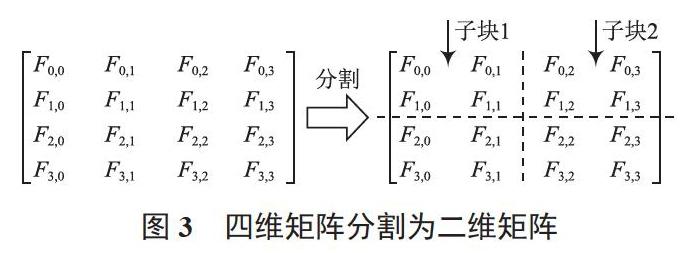
矩阵分割:将一个矩阵用若干条横线和竖线分成许多个小矩阵,将每个小矩阵称为该矩阵的子块,使原矩阵的结构显得简单而清晰[6],从而能够大大简化运算步骤。图3所示是将一个四维矩阵分割为二维矩阵[7]。
2.2 数字图像统计特征
(1)灰度平均值指一幅图像中所有像素灰度值的算术平均值,计算公式如下:
(2)灰度方差指图像中各个像素的灰度值与整个图像平均灰度值的离散程度,计算方式如下:
3 基于图像分割匹配的识别算法
3.1 算法基本思想
图像分割匹配算法的首要任务是进行图像分割,对模板图像与未知图像分别进行矩阵分割,降低存储图像的数组维度[8]。将构建的模板图像按照一定的搜索策略在未知图像上做平稳的全覆盖移动,将模板图像的灰度值与模板图像投射在未知图像的区域灰度值做相似性测量,如灰度值方差比较、相关函数、相关系数等[9]。如果测量的最小误差小于之前设定的阈值[10],则认定未知图像和模板图像相匹配,否则认定未知图像和模板图像不匹配[11]。
3.2 算法设计
算法流程如图4所示,步骤如下:
(1)选取合适的赛道图像作为模板,将模板赛道图像进行二值化处理;
(2)将模板图像进行矩阵分割,并用一个多维数组Template_Image[m][n]存储图像数据,计算分割后各子块图像的灰度平均值并存储到数组Template_average[m][n]中;
(3)输入未知图像,将未知图像进行二值化处理;
(4)将未知图像进行矩阵分割,并用一个多维的数组Image[m][n]存储图像数据,计算分割后各子块图像的灰度平均值并存储到数组average[m][n]中;
(5)将模板图像各子块的灰度平均值数组Template_average[m][n]和未知图像各子块的灰度平均值数组average[m][n]代入公式运算,=Template_average[m][n],f(i,j)=average[m][n],最终计算得到未知图像灰度值方差variance;
(6)设置合适的方差阈值,将方差variance和设置的方差阈值进行比较,判断未知图像是否与模板图像匹配。
4 算法识别准确率测试
4.1 测试装置的硬件结构
全国大学生“恩智浦杯”智能汽车竞赛中的B型车模作为本次测试的硬件设备,车体上搭载了竞赛专用的硬件二值化摄像头,该摄像头获取的图像为黑白二值图像。图5所示为测试用车实物。
4.2 测试过程
本次测试选取智能汽车竞赛中的弯道赛道元素、十字路口赛道元素和终点线赛道元素作为测试对象,赛道元素二值化图像如图6所示。测试时智能车通过各赛道元素时的速度约为1.5 m/s。为了直观判断并记录算法是否正确识别到赛道,可设定当智能车识别到相应赛道元素时,蜂鸣器响,否则蜂鸣器不响。将传统赛道元素识别算法与本文提出的识别算法对三种赛道图像进行10次平行实验,分别记录智能车通过相应赛道元素时准确识别的次数。
4.3 测试结果分析
测试数据如图7所示,通过分析统计图表的数据可知,在识别弯道赛道、十字赛道、终点线赛道的实验中,传统赛道识别算法未能准确识别赛道的次数分别为3次、4次、2次;而本文提出的新赛道识别算法分别只有1次、2次、0次。对比可知,本文提出的新赛道识别算法能更准确地识别赛道元素,识别误判率更低。此外,在测试中发现不同赛道元素之间图像特征差异大,传统识别算法通用性差,每种赛道类型都需要特定的识别算法。本文提出的基于图像分割匹配的赛道元素识别算法可实现一对多的识别效果,在实际应用中只需在该算法中预存赛道类型的模板图像数据并设置合适的方法阈值即可实现赛道元素的识别,能够有效精简程序、节约硬件资源、缩短程序运行时间。
5 结 语
本文分析了智能汽车竞赛中传统赛道元素识别算法的不足,提出了基于图像分割匹配的赛道元素识别算法。通过多次重复实验验证了算法的可行性,相比傳统的识别算法,基于图像矩阵分割匹配的赛道元素识别算法原理简单,程序精简,识别准确率高。该算法在智能汽车竞赛中能更好地提高图像的识别准确率。
参 考 文 献
[1]卓晴,黄开胜,邵贝贝.学做智能汽车:挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007:12-14.
[2]何映材.智能循迹赛车图像处理算法的研究及其辅助教学系统的实现[D].北京:北京邮电大学,2017.
[3]劳健涛,李智豪,蒲小年,等.智能车竞赛中图像畸变还原的实现[J].物理实验,2018,38(6):32-34.
[4]黄俊嘉,余志贤.基于特征分类的智能汽车赛道元素识别算法[J].计算机产品与流通,2018(3):127.
[5]张瑾,杨常清.基于矩阵分析的数字图像处理方法[J].微机发展,2003(5):36-37.
[6]党文静.图像区域分割算法的研究与应用[D].淮南:安徽理工大学,2018.
[7]谷莉.基于块矩阵的快速图像分割[J].科技传播,2011(15):94.
[8]贾永红.数字图像处理实习教程[M].武汉:武汉大学出版社,2012.
[9]郭健.基于局部特征的图像匹配算法研究[D].南京:南京邮电大学,2018.
[10]叶志坚.基于图像特征提取和描述的匹配算法研究[D].广州:广东工业大学,2018.
[11]张源峰.基于图像特征与灰度值的快速匹配算法研究[D].兰州:兰州理工大学,2018.
