基于超宽带的变电站人员安全防护报警系统
2019-11-28彭志恒刘德康陈张平王春达
杨 波,彭志恒,刘德康,陈张平,王春达
基于超宽带的变电站人员安全防护报警系统
杨 波,彭志恒,刘德康,陈张平,王春达
(杭州电子科技大学 自动化学院,浙江 杭州 310018)
为防止变电站内发生人员误入非安全区,设计了一种基于超宽带的变电站人员安全防护报警系统。该系统需人员佩戴UWB定位标签,辅以机器人指定路线巡逻进行突增非安全区域标注,并将其上传至后台,实现对人员的危险区域安全报警防护。通过在非安全区域外围设置报警区域,一旦人员进入,立即对其报警提醒。经测试,系统失报(应报警但未报)率为0.15%,误报(不应报警却发出警报)率为0.36%。
变电站;安全防护;机器人;超宽带报警系统
变电站等电力行业的生产设备大型化、密集化,潜在危险多,对变电站员工的安全管理尤为重要[1]。本文设计一种基于超宽带的变电站人员安全防护报警系统。该系统由工作人员佩戴超宽带(ultra wideband,UWB)标签,辅以机器人实现工作人员安全防护[2-3],通过基站后台完成对机器人和工作人员的实时定位和实时位置显示[4-5]。机器人以不同方式巡逻,后台人员通过查看摄像头画面判定变动危险区域(变危区),将区域坐标正向标注于机器人,亦可由现场工作人员发现后反向标注于机器人,设定机器人在危险区巡逻和报警,使误入固定危险区域(固危区)、变危区的概率降低到极小值。
1 总体方案设计
基于超宽带的变电站人员安全防护报警系统,以UWB的高精度定位为主、机器人为辅,实现在变电站环境中的提前报警。机器人的总体设计方案主要涵盖基于三轮全向式移动底盘的运动单元、基于UWB模块的定位单元、基于ARM的控制单元、基于摄像头的监控识别单元以及供电电源、串口通信。
机器人使用三轮全向轮,具有良好的运动性,可以在平面内任意方向运动,且结构简单、易于控制。
UWB定位单元包括移动标签(Tag)和固定基站(Anchor),基于双路测距(two way ranging,TWR)[6]算法对采集的数据进行滤波优化,得到稳定的输出Tag定位坐标信息。辅以陀螺仪为机器人运动提供加速度、航向角信息。
控制系统基于ARM芯片,处理传感器数据决策机器人运动状态、解算Tag坐标、控制机器人实现语音报警等功能。
UWB配合后台软件划定电子围栏;当检测到有工作人员在危险区域内时,机器人会前往报警提示,并警示监控室的安保人员。
2 系统硬件设计
2.1 运动控制系统
运动控制系统以ARM芯片为控制核心,根据来自红外传感器、UWB定位系统等的数据信息完成机器人运动状态的控制决策,输出PWM波形到驱动模块。机器人采用带编码器的直流电机,构成运动单元的反馈控制[7],有效调节电机转速。运动控制系统硬件设计如图1所示。

图1 运动控制系统硬件设计
2.2 UWB定位系统
在复杂环境下,由于多径效应等的影响,各种方式的定位误差明显增大,UWB定位系统因其独特的通信原理,具有多径分辨率强、功耗低、抗干扰能力强等特点。基于UWB搭建的机器人定位系统包括3个Anchor和一个机器人端Tag。
Anchor与Tag硬件设计完全相同,均包含Stm32主控芯片和DecaWave公司开发的DW1000芯片,二者依靠SPI方式进行数据通信。UWB定位模块负责完成Anchor-Tag测距信息的采集、滤波、优化。Tag安装于机器人主控板,通过串口将距离数据传输到运动控制系统的ARM芯片,由其完成机器人实时坐标的解算。定位系统硬件设计如图2所示。

图2 UWB定位系统硬件设计
3 系统软件设计
变电站人员安全防护报警系统的软件设计主要包括UWB实时定位、危险区域报警、智能跟随、自定义路线巡逻、正向标注危险区域。
3.1 UWB实时定位
采用UWB是低成本、精确定位的可靠方案。本文使用TWR测距,基站和标签进行双向通信,交换各自的发送时间和接收时间信息,计算TOF(time of flight),得到基站—标签间测距信息。再采用三边测量算法实现标签定位,计算标签实时坐标位置。
3.1.1 测距算法
采用双路测距算法,该算法双向测量,不需要进行节点间的数据同步,数据包在空中传递的时间为:


最终得到基站—标签间距离为

其中为光速。
3.1.2 三边测量法
(4)
3.1.3 去极值最小二乘法


令:
其中:

即
得方程组:

求解得拟合方程为

3.2 危险区域报警
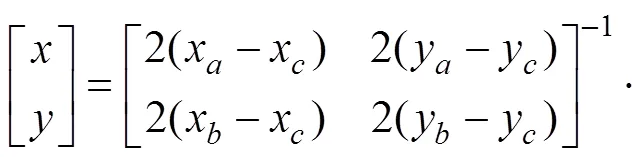
在巡逻过程中,机器人搭载摄像头将采集的信息实时传送给后台观测、调控并进行人脸检测,对无关人员进行采集报备提示后台;搭载语音模块,实现与现场人员之间的语音交互,并提示现场人员注意周围的危险区域;后台对进入变危区的人员进行标红,并辅以机器人提示,防范突发情况的发生。危险区域报警流程如图5所示。
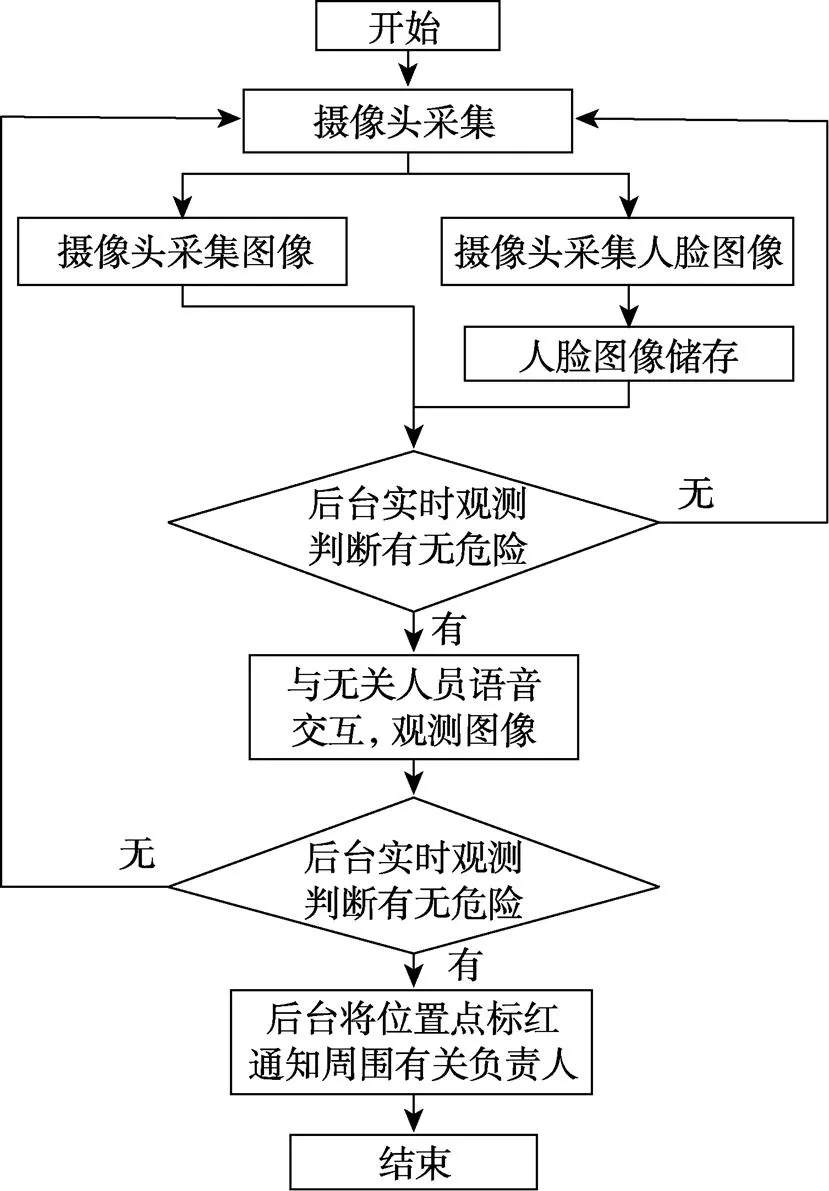
图5 危险区域报警流程
3.3 智能跟随
在生产现场,每个危险区域都对应有2个预警区域组成一个报警区域(见图6)。人员一旦踏入一级预警区域时,离人员最近的机器人开始加速向其所在的位置移动,在到达人员的附近时开启语音预警提示人员,并实时跟随人员;当人员进入二级预警区域,机器人立即开启危险区域报警;如果人员离开一级预警区域,则机器人恢复正常巡逻。

图6 报警区域示意图
3.4 自定义路线巡逻
机器人的巡逻方式分为2种。
(1)设定路线巡逻。机器人按照设定路线在固定的危险区域附近进行巡逻。
(2)变动路线巡逻[10]。一是变动危险区域巡逻方式,即当后台设定新的变危区时,离危险区域最近的空闲机器人收到后台指令后快速前往该区域进行巡逻;二是后台人员自定义巡逻方式,即当工作人员想查看工厂的某些地方的情况时,就可以在后台选中处于空闲的机器人进行自定义路线编辑,机器人收到指令后,便会开始该路线的巡逻,而工作人员通过机器人所搭载的摄像头可以查看工厂各处情况。
3.5 正反向标注危险区域
当出现变危区,且维修人员未到达之前,需要通过正反向标注危险区域以提示现场人员。
机器人在巡逻过程中,将所拍摄的视频信息实时传给后台,后台人员根据此视频信息判断危险区域,并通过机器人的远端操控功能对危险区域重新进行范围标注并生成报警区域。机器人将对新的变危区进行巡逻,实现正向标注危险区域。
当工人发现新的危险区域时,开启机器人跟随功能,使机器人移动至该区域,通过机器人将危险区域坐标传输给后台,由后台生成报警区域,机器人将开始在新的变危区进行巡逻,实现反向标注危险区域。
4 实验结果分析
在变电站环境下进行了UWB室外定位、UWB报警区域报警效果、UWB报警区域报警成功率与人的行走速度关系的实验,并对去极值最小二乘法进行了Matlab仿真。实验测试场地如图7所示。
4.1 UWB室外定位实验结果与分析
UWB定位实验在长6.5 m、宽5 m的矩形区域内进行,基站搭建于矩形的3个顶点,UWB定位模块高度2.5 m。矩形区域内选定10个测试点,标签坐标的测量值及误差数据如图8所示。
图7 实验测试场地
由图可知,UWB定位精度稳定在10 cm内,满足变电站人员安全防护报警所需的定位精度条件。
4.2 去极值最小二乘法仿真
采集了机器人运动过程中的一段数据,在Matlab中分别使用普通最小二乘法与去极值最小二乘法进行预测跟踪,其中数据序列长度5,拟合函数最高次幂为2,仿真结果如图9所示。
去极值最小二乘法可有效跟踪实际运动轨迹,并在UWB定位缺失时提供可靠的预测结果。与普通最小二乘法相比,可有效去除数据抖动、提高平滑性。
4.3 UWB报警区域报警效果实验结果与分析
人的行走速度和报警区域的大小都会影响系统的报警正确率。选择以60.7 cm为边长的正方形区域作为初始测试区域,每次面积缩小一半且保持正方形形状不变,由下式可以依次得出测试的面积与边长:


将人的运动速度分为5个等级:1级(0~0.48 m/s);2级(0.48~0.72 m/s);3级(0.72~0.96 m/s);4级(0.96~1.20 m/s);5级(1.20~1.44 m/s)。保持测试面积不变,在同一测试面积下让人以5种不同的行走速度通过该区域,然后测试人通过该报警区域时后台的报警成功率,具体如表1所示。
由表1可知,在边长为21.24 cm的正方形以上的报警区域,在5种速度下报警率为100%;在边长为21.24 cm的正方形以下的报警区域报警率随着人的速度增大而减小。实验结果满足系统所需要的高报警率的要求。

图8 UWB室内定位实验结果分析

图9 去极值最小二乘法仿真
4.4 UWB报警区域报警效果实验结果与分析
在工厂定位的范围内,人为设置一个中心坐标为(220 m,218 m),半径为3.5 m的圆形危险区域(见图10)。后台自动生成一个圆心坐标不变的半径为7.5 m的报警区域。
图10中,虚线同心圆表示人为设定的危险区域与自动生成的报警区域,小点代表报一次警机器人的位置,加号代表了未报一次警机器人的位置,叉号代表了报警失误一次机器人的位置。机器人在沿着报警区域边界运行时共测试了7700次,其中失报了12次,失报率为0.15%;机器人在报警区域内运行时共测试了2500次,其中误报了9次,误报率为0.36%。

表1 UWB报警区域内报警成功率 %

图10 UWB报警区域报警效果
5 结语
基于超宽带变电站人员安全防护报警系统实现了对人员误入变危区的安全报警防护,并在后台实时显示人员与机器人的坐标位置,通过后台工作人员操控机器人定点到达查看各变电站的情况。该安全防护报警系统具有普适性,除变电站外,亦适用于其他工厂,因此超宽带的变电站人员安全防护报警系统具有足够的实用性。
[1] 朱旭,张志刚,李玲.智能变电站运维隐患危险点分析及防治[J].中国战略新兴产业,2018(32): 194.
[2] YANG G, SHENG L, XIANG W. A patrol mobile robot for power transformer substations based on ROS[C]//2018 Chinese Control And Decision Conference (CCDC), 2018: 456–460.
[3] PORTUGAL D, RUI P R. Performance Estimation and Dimensioning of Team Size for Multirobot Patrol[J]. IEEE Intelligent Systems, 2017, 32(6): 30–38.
[4] LOYEZ C, ROLLAND N, BOCQUET M. UWB technology applied to millimeter-wave indoor location systems[C]// International Radar Conference, 2014: 1–5.
[5] HANSSENS B, PLETS D, TANGHE E, et al. An Indoor Variance-Based Localization Technique Utilizing the UWB Estimation of Geometrical Propagation Parameters[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(5): 2522–2533.
[6] 彭笑,张丹红,熊斌宇,等.基于DW1000的室内定位系统设计与稳定性优化[J].广西大学学报(自然科学版),2018, 43(5): 1803–1810.
[7] KIM K B, KIM B K. Minimum-Time Trajectory for Three- Wheeled Omnidirectional Mobile Robots Following a Bounded- Curvature Path With a Referenced Heading Profile[J]. IEEE Transactions on Robotics, 2011, 27(4): 800–808.
[8] 王文华.室内定位系统网关及监控服务平台设计与实现[D].南京:东南大学, 2015.
[9] 贾小勇,徐传胜,白欣.最小二乘法的创立及其思想方法[J].西北大学学报(自然科学版),2006, 36(3): 507–511.
[10] CHEN Xu. Fast Patrol Route Planning in Dynamic Environments[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2012, 42(4): 894–904.
Safety protection and alarm system for substation personnel based on ultra wideband
YANG Bo, PENG Zhiheng, LIU Dekang, CHEN Zhangping, WANG Chunda
(College of Automation, Hangzhou Dianzi University Hangzhou 310018, China)
In order to prevent the occurrence that people enter the unsafe area by mistake in the substation, a high-precision patrol robot system combining UWB with machine vision is designed. This system requires personnel to wear UWB positioning tags and patrol designated routes of robots to mark sudden increase of unsafe areas and upload them to the background to achieve safety alarm protection for workers in dangerous areas. By setting an early warning area on the periphery of the unsafe area, workers will be alerted as soon as they enter the area. After testing, the rate of system failure to report (should alarm but not report) is 0.15%, and the rate of system failure to report (should not alarm but alarm) is 0.36%.
substation; safety protection; robot; UWB alarm system
TP302
A
1002-4956(2019)11-0141-05
10.16791/j.cnki.sjg.2019.11.034
2019-05-08
国家自然科学基金项目(61703130);国家级大学生创新创业项目(201810336022)
杨波(1998—),男,甘肃兰州,本科生,主要研究方向为机器视觉。E-mail: czp.apple@hdu.edu.cn
陈张平(1987—),男,浙江德清,硕士,讲师,主要研究方向为功率超声、优化控制。