直控式电动舵机教学实验系统设计
2019-11-28王明辉杜宏旺
刘 涛,王明辉,杜宏旺
直控式电动舵机教学实验系统设计
刘 涛,王明辉,杜宏旺
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
设计开发了直控式电动舵机教学实验系统。采用STM32Cortex-M4单片机作为控制核心,设计实现了直接控制式电动舵机的位置闭环控制系统。详细介绍了实验系统的设计方案、设计任务、硬件组成、数学建模和仿真设计,开发了基于LabWindows的上位机软件界面,实现控制指令输入和动态测试。该系统采用模块化的软硬件方案,有助于深入学习电动舵机闭环控制、STM32单片机、上位机设计等知识,提高了学生知识综合运用能力和实践动手能力,获得了良好的实践教学效果。
电动舵机;位置闭环控制;教学实验系统
舵机是导弹及飞行器的重要执行部件[1-2],舵机的技术参数很大程度影响了导弹的操纵性能。电动舵机具有制造成本低、结构比较紧凑、经济性好、维护容易、性价比高等优点,因而很多飞行器选择电动舵机作为飞行控制系统的执行元件。目前使用的电动舵机主要有直控式电动舵机和间接控制式电动舵机两大类。间接控制式电动舵机采用磁粉离合器作为执行元件,磁粉离合器长时间工作容易出现磁粉硬化和失效;直接控制式电动舵机一般由直流力矩电机、测速发电机、减速器及反馈电位计等组成,具有结构简单、效率高、响应快速等优点[3-4]。
本文构建了完整的直控式电动舵机教学实验系统。以STM32Cortex-M4[5]单片机作为控制核心开发实验教学仪器,有助于学生学习电动舵机组成控制原理,学习STM32单片机及嵌入式相关知识,有助于学生开展研究型、创新型实验。自主研发功能全面的实验设备大大降低实验成本,可提供完全开源的软硬件体系,并且能够激发学生自主创新能力。
1 直控式电动舵机计算机控制实验系统总体设计
1.1 控制系统的设计
设计的直控式电动舵机计算机控制系统原理框图见图1。

图1 控制系统原理框图
本系统通过上位机设定舵机旋转角度,中央控制器接收上位机设定的角度后,输出一定的PWM波到功率放大器上,通过功率放大器将其放大后输出到力矩电机上,使力矩电机发生转动,经过减速器传动,使舵机转动到给定的角度;系统通过电位计将转动的角度信号传到中央控制器上,经过A/D转换,进行舵机的位置闭环控制,将电位计反馈的角度信号实时地传输给上位机,完成上位机的实时角度显示与位置反馈图形显示。
上位机界面上提供位置指令输入、PID参数调整、动态响应曲线绘制、系统归零、数据保存等功能。
1.2 实验教学系统的硬件组成
直控式电动舵机教学实验系统(见图2)主要由执行机构、机械运动结构、反馈装置、功率放大器、中央控制器组成。设计完成的直控式电动舵机教学实验系统中直控式电动舵机机械结构见图2(a),电动舵机控制与测试系统面板见图2(b)。
执行机构采用稀土永磁直流力矩电机,型号为70LCX-1-HKD,机组有扭矩高、调速特性号、退磁弱、机械特性好、输出稳定、振动小、体积小等优点。在电动舵机位置闭环控制系统中,减速器是传动装置重要的组成部分之一,选用PL80L2-32-P2-S2减速机作为直控式电动舵机教学实验系统的机械运动结构。测速发电机作为速度反馈,选用WDD35型电位计作为系统的位置反馈装置。设计采用的功率放大器是典型的H桥功放[6]。中央控制器设计采用STM32开发板,STM32系列开发板是专为要求高性能、低成本、低功耗的嵌入式应用而专门设计的ARM Cortex-M3内核[7]。上位机系统设计采用LabWindows作为上位机的编辑软件,完成对电动舵机控制系统的指令输入和动态测试。

图2 电动舵机控制与测试系统
2 直控式电动舵机的控制系统软件设计和仿真
2.1 控制系统上位机设计
直控式电动舵机的上位机人机界面程序流程如图3所示。直控式电动舵机的主体程序包括两部分,分别是人机界面部分和底层控制部分,上下位机通过串口来完成数据通信。

图3 人机界面程序流程图
上位机部分实现参数设定、传输以及实时舵偏角度接收与显示,下位机底层程序实现设定参数的接收、位置闭环控制、实时舵偏数据的发送。
在开启上位机系统之后,首先判断是否需要输入PID参数,点击设定按钮就会将参数传输给下位机,系统默认的PID参数可以进行运算,参数设定完成之后就需要设定舵机的给定旋转角度或者正弦输入。底层程序会根据设定的PID参数以及控制指令,实现闭环控制,若开启舵偏参数接收,就将电位计的参数实时传输给上位机系统用于系统实时舵偏显示。
2.2 下位机实现
直控式电动舵机控制系统的底层实现了舵机的位置闭环。底层控制程序流程图如图4所示。上位机将PID参数和指令信息通过串口发送给下位机后,下位机接收上位机传输的参数,PID参数用于闭环反馈控制的计算,反馈舵偏角通过AD转换,测速发电机的速度信息通过分压隔离变换、AD接口送到单片机,STM32单片机输出PWM波到H桥功率放大器,控制直流电机转动,直流电机带动行星减速器运动。电位计输出传送到上位机实现舵偏动态显示。

图4 底层控制程序流程图
2.3 控制系统仿真验证
对直控式舵机位置闭环进行系统建模、仿真设计,根据系统各组成部分的传递函数和PID控制算法的设计参数,利用Simulink对系统在空载状态下进行仿真[8-10],系统的仿真模型见图5。

图5 系统仿真模型
设置2组不同的PID参数,设置系统的输入的舵偏角阶跃信号为60°,得到对应2组PID参数控制的系统输出曲线见图6。

图6 输入的阶跃信号为60°的输出响应曲线
3 实验系统性能测试
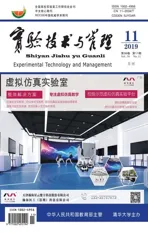
上位机与下位机之间的通信通过串口进行数据接收与发送[11-12],如图7所示,先打开上位机界面上的2个开关,在控制参数设定部分,设定位置环的PID参数,发送给下位机;再通过在上位机舵偏设定输入一个舵偏角,点击设定按钮后,舵机会旋转到上位机所设定的角度,点击接收按钮,通过电位计反馈的信号显示舵机的实时的偏转,指针会指向到舵机旋转角度的位置,并在右下角显示仪表指向位置的数值。这样对电动舵机控制系统的指令输入和动态测试就已经完成。例如在下面的实验教学操作中,先设定好PID参数后将系统归零,待舵偏角归零后,依次设定舵机旋转角度为40°,–40°,20°,最终得到如图7所示动态测试结果,符合设计的要求,实验系统动态性能测试成功,实现了对直控式舵机的位置闭环控制和上位机的指令输入和动态测试,点击退出按钮,退出当前的上位机界面。
图7 系统动态性能测试
4 教学应用及效果
直控式电动舵机教学实验系统自2015年研制,经过不断改进和优化,作为主要仪器设备支撑探测制导与控制技术专业本科生的专业综合实验课程,已服务本科生实验教学3年。该实验课程主要包括电动舵机控制与测试实验项目、惯性测量单元项目、导弹姿态控制半实物仿真、导弹制导控制半实物仿真等。电动舵机控制与测实验项目具有开放性、研究性、综合性、创新性等特点。该实验仪器服务于探测制导与控制技术本科生实验、课程设计、毕业设计等,同时为后续的舵机测试实验项目的研发提供硬件支撑,也作为导弹半实物仿真实验系统构成的主要设备。该实验设备为本科生提供了一种基于嵌入式的电机闭环控制调试实验平台。
5 结语
直控式电动舵机教学实验系统可以作为给本科生专业实验的设备,有助于学生深入了解电动舵机的结构、闭环控制原理、上位机界面设计、PID控制参数整定、电动舵机的动态响应等知识,为本科生的学习和实验提供了良好的教学条件,对于培养学生的创新能力和工程实践能力具有重要意义。
[1] 杨育荣,王建琦,李友年.空空导弹舵机性能分析方法[J].弹箭与制导学报,2012, 32(5): 57–60.
[2] 汪军林,解付强,刘玉浩.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3): 42–46.
[3] 李朋,周军,高智刚.舵机转角精确测量系统的设计[J].测控技术,2012, 31(6): 18–21.
[4] 谢俊超,肖清,花靖.船用新型电动舵机可行性研究[J].舰船科学技术,2013, 35(10): 78–81.
[5] 高原,谷良贤.一种导弹电动舵机系统的自适应控制方法研究[J].测控技术,2007, 26(11): 33–35.
[6] 曾漫,熊小丽,丁文革,等.一种典型数字无刷电动舵机的设计[J].中北大学学报,2011, 32(6): 751–753.
[7] BREIVIK M, HOVSTEIN V, FOSSEN T I. Straight line target tracking for unmanned surface ve hicles[J]. Modeling, Identification and Control, 2008, 29(4): 13I–149.
[8] 沈智鹏,刘继中,汪宇,等.一种无人水面艇控制仿真系统研究[J].系统仿真学报,2015, 27(9): 2038–2043.
[9] 杨发田,葛洪宇,张建华,等.基于STM32处理器的嵌人式实验系统设计与实现[J].机械设计与制造工程,2013, 42(3): 57–61.
[10] 陆翔,刘邦经.基于STM32的嵌入式综合实验开发平台研究[J].实验室研究与探索,2017, 36(10): 57–60.
[11] 郑世珏,卢强.基于嵌人式的移动学习教学实验箱设计与实现[J].实验技术与管理,2012, 29(12): 51–54.
[12] 杨继森,张静,朱革,等.基于ARM Cortex平台的嵌入式系统课程虚拟实验平台设计[J].实验技术与管理,2014, 31(7): 97–101.
Design of teaching experiment system for direct-controlled electric steering gear
LIU Tao, WANG Minghui, DU Hongwang
(College of Automation, Harbin Engineering University, Harbin 150001, China)
A teaching experiment system of direct-controlled electric steering gear is designed and developed. The STM32Cortex-M4 MCU is used as the control core to design and implement the position closed-loop control system of the direct-controlled electric gear. The design scheme, design task, hardware composition, mathematical modeling and simulation design of the experimental system are introduced in detail. The upper computer software interface based on LabWindows is developed, which can realize control instruction input and dynamic test. This system adopts the modular software and hardware scheme, which is helpful for students to further study the knowledge of the closed-loop control of the electric steering gear, STM32 single-chip computer, upper computer design, etc., which improves students’ comprehensive knowledge application ability and practical ability, and achieves good practical teaching effect.
electric steering gear; position closed-loop control; teaching experiment system
TJ760.3-45
A
1002-4956(2019)11-0084-05
10.16791/j.cnki.sjg.2019.11.021
2019-04-01
国家自然科学基金项目(51409059);黑龙江省博士后科研启动金项目(LBH-Q16066);中央高校基本科研业务费专项资金项目(3072019CF0409)资助;哈尔滨工程大学2018年校级本科教学改革研究项目(JG2018B19Z)
刘涛(1979—),男,辽宁法库,博士,讲师,主要从事制导与控制系统及视觉感知研究。E-mail:liutao@hrbeu.edu.cn