电子多臂机控制及性能检测实验平台设计
2019-11-28于鸿彬张浩鹏邵宏宇
于鸿彬,张浩鹏,邵宏宇
电子多臂机控制及性能检测实验平台设计
于鸿彬1,张浩鹏1,邵宏宇2
(1. 天津工业大学 机械工程学院,天津 300387;2. 天津大学 机械工程学院,天津 300072)
针对新组装的多臂机需要对其可靠性进行检验,设计了一套多臂机控制及性能检测系统。通过分析多臂机工作原理,将嵌入式微控制器、花样数据存储器、变频器及电机驱动电路、多臂机电磁铁驱动电路、电磁铁磁性检测电路、电磁铁电流检测电路、多臂机摆臂运动检测电路以及网络通信接口功能模块集成在嵌入式电子多臂机控制及性能检测系统中,可以对电子多臂机的整体性能进行检测,给出了嵌入式电子多臂机控制系统的系统架构、硬件电路的设计和实现方法,软件系统的设计和实现方法。工厂实际应用表明,该系统能够用于控制及检测电子多臂机性能是否满足使用要求。
电子多臂机;性能检测;实验平台
旋转式多臂机作为纺织机械中的一种重要纺织配套装备,其工作性能的优劣直接影响产品的产量和质量[1]。目前,国内针对多臂机的性能检测方面资料较少,多臂机检测技术相对落后,制造的多臂机无法保证每一次动作都准确无误,制约了多臂机的研发和生产。在正常织造过程中,会出现多臂机开口机构提综动作错误,出现织物花型错位问题。
起初,对多臂机的性能检测,主要是依靠人工方法进行,通过目测或声音进行初步简单的测试。这种测试方法,需要根据工人丰富的经验找出问题并据此解决问题,工作量大,时间长,精度及可靠性不高,而且不能长时间不间断地进行检测,无法满足高精度和高可靠性的控制及检测需求。
随着检测技术的发展,出现了专业人员利用专业设备进行深入检测的方法,这种方法一定程度上满足了高精度和高可靠性的要求,但是依然不能长期不间断地对设备进行性能检测。随着微控制器、传感器技术和计算机技术的发展,利用微控制器、传感器技术和计算机技术构建多臂机控制及性能检测系统能满足实际应用需求[2]。
本文以江苏常熟某公司生产的某种型号电子多臂机为研究对象,设计开发嵌入式微控制系统,对电子多臂机进行控制及性能检测,为电子多臂机控制和检测提供有效方法。
1 多臂机
多臂机如图1所示。
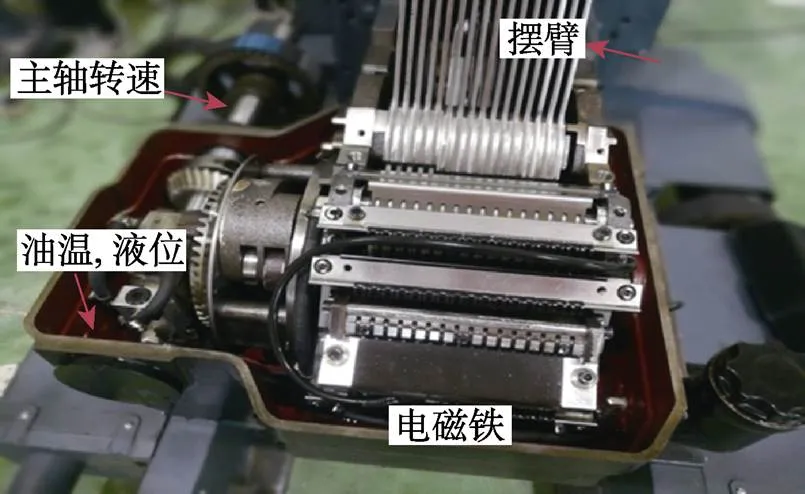
图1 多臂机
2 系统原理与设计方案
嵌入式电子多臂机控制及性能检测系统(以下简称检测系统)由多臂机控制驱动系统和多臂机性能检测系统组成,包括嵌入式控制单元(MCU)、电源处理单元、存储单元、光耦隔离单元、功率放大单元等,通过485通信单元与变频器通信,通过网络模块与工控上位机通信,实现功能控制及数据传输。
本检测系统可以实时控制多臂机在不同速度、不同花型下运行,采集到的数据包括运行速度、摆臂运行状态、运行花样、错误次数、开始运行时间T1、停止运行时间T2、检测时间T3等。工控上位机通过网络模块与检测系统通信,控制多臂机运行速度、开始检测、停止检测、花样下载、花样上传、参数设定、参数读取、错误显示及预警等。数据接收处理单元将数据进行整理、剔除无效数据,保存有效数据,经网络模块将数据发送到工控上位机,同时将有效数据保存到数据库中,以便查询及处理,同时可以用来改进及优化电子多臂机。多臂机生产企业车间情况复杂、控制及检测机台较多,需要在每个机台上都配置控制及性能检测系统,每个系统都在相同的局域网中运行,生产者可以控制并实时监测系统运行状态,使电子多臂机的运行控制及检测智能化、精确化,同时确保采集到每台机器上的生产数据[3]。电子多臂机控制及性能检测系统原理见图2。
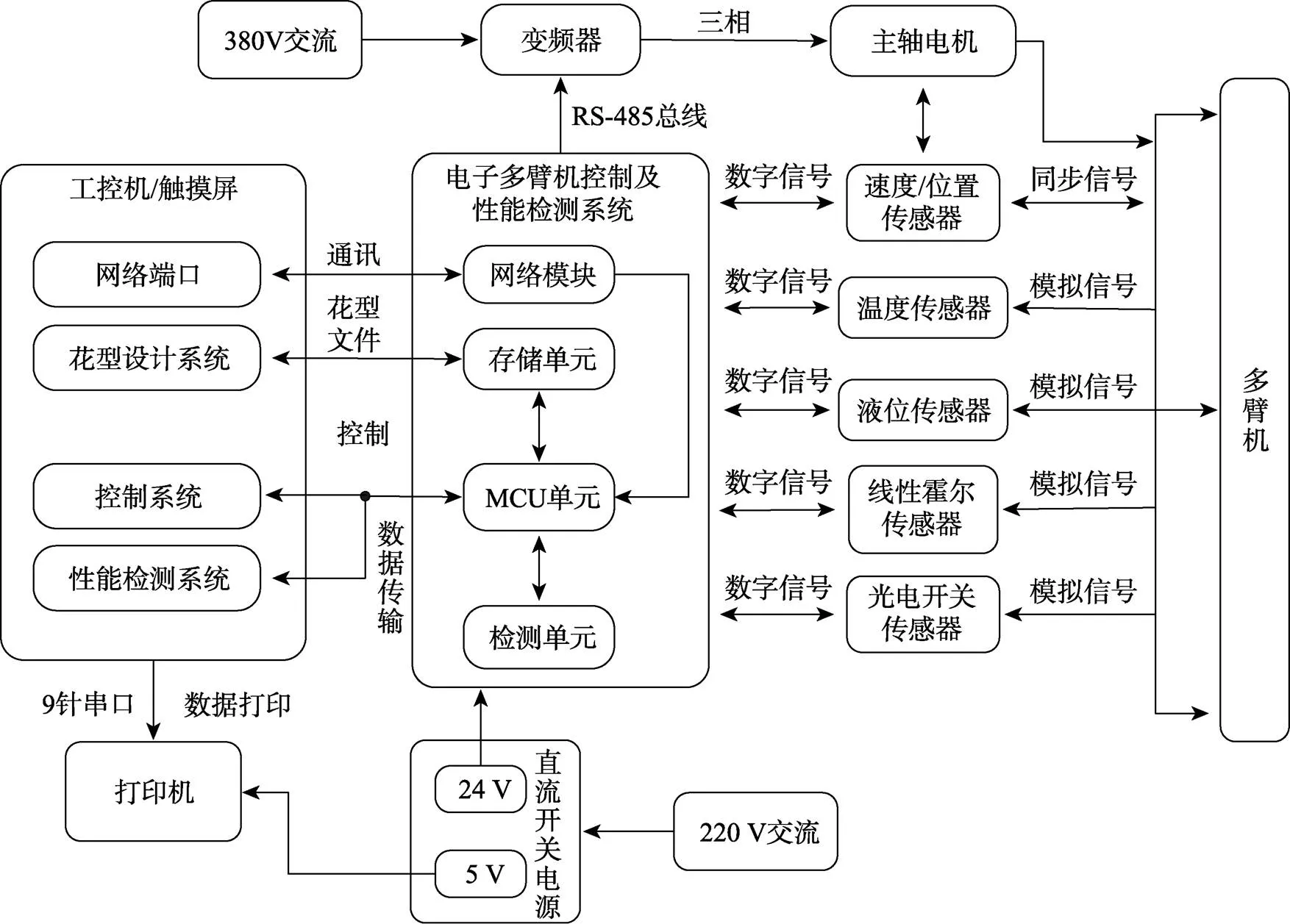
图2 电子多臂机控制及性能检测系统原理框图
3 系统硬件设计
3.1 微控制器及数据存储器选取
微控制器采用高性能、低功耗的8位AVR微处理器Atmega128[4],是嵌入式电子多臂机控制及性能检测系统的核心部件。Atmega128采用先进的RISC结构和增强型AVR内核,处理速度快并且稳定可靠。133条指令大多数可以在一个时钟周期内完成,工作于16 MHz时性能高达16 MISP。2路8位PWM,6路分辨率可编程(2到16位)的PWM,8路10位ADC,53个可编程I/O口线,内部资源丰富。
对于多臂机的控制及性能检测需要多种花型,且需要精确稳定的驱动提花摆臂。综合以上因素,本文选用美国Ramtron公司生产的具有高可靠性、高速、耐久性数据读写、抗干扰能力强、接近无限次擦写等优点的512K非易失性FRAM(Ferro electric RAM)芯片作为花型数据存储器。FM24C512的总线频率高达1 MHz,可擦除次数1010次,写入速度快(Flash的1000倍以上),非常适用于多臂机控制需要的非易失性,且需要频繁、快速、稳定存储及读取数据的要求。数据存储单元电路见图3。
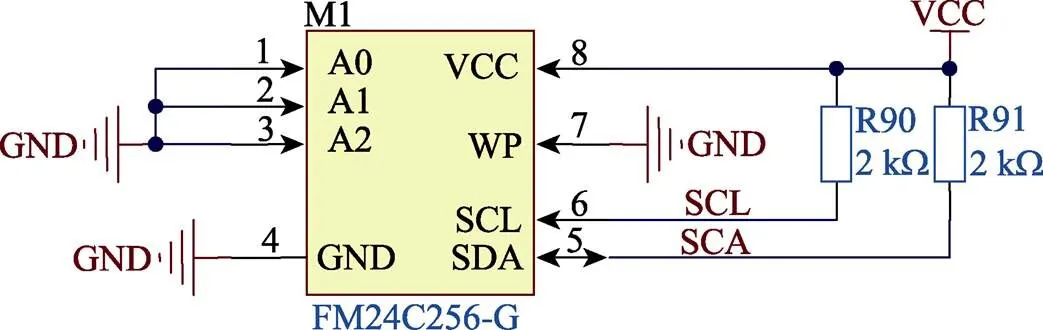
图3 数据存储单元电路
3.2 无线通信设计
为了实际需要,采用无线通信的方式实现上位机与下位机之间的通信,采用Wi-Fi转串口模块实现无线通信。无线通信单元电路图见图4,USR-WiFi232无线模块采用3.3 V直流电源供电,将RELOAD引脚拉低1~3 s可实现无线模块初始化,拉低RESET引脚超过0.5 s实现复位操作,模块与主芯片通过串行接口连接,实现数据的传输。
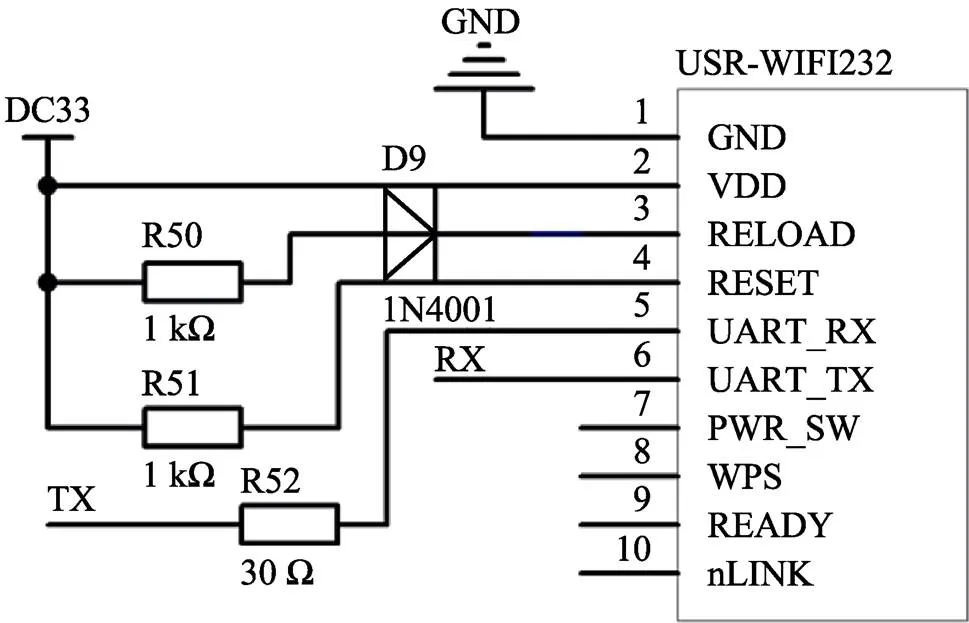
图4 无线通信单元
Wi-Fi模块设置为STA模式,通信协议采用UDP- Server,波特率为115 200 bit/s,系统采用VB.NET开发上位机,通过Winsock控件实现TCP连接[5],上位机通过路由器与无线模块相连,实现无线通信。
3.3 滤波电路设计
多臂机实际工作环境比较恶劣,采集到的信号混杂着许多高频噪声信号。当系统进行数据采集时,如果设置的采样频率不满足Nyquist采样定理的要求时,会导致采集结果出现频率混叠现象。为了有效地避免这一现象,需要加入滤波器来消除高频干扰信号对数据采集的影响[6]。滤波电路见图5。
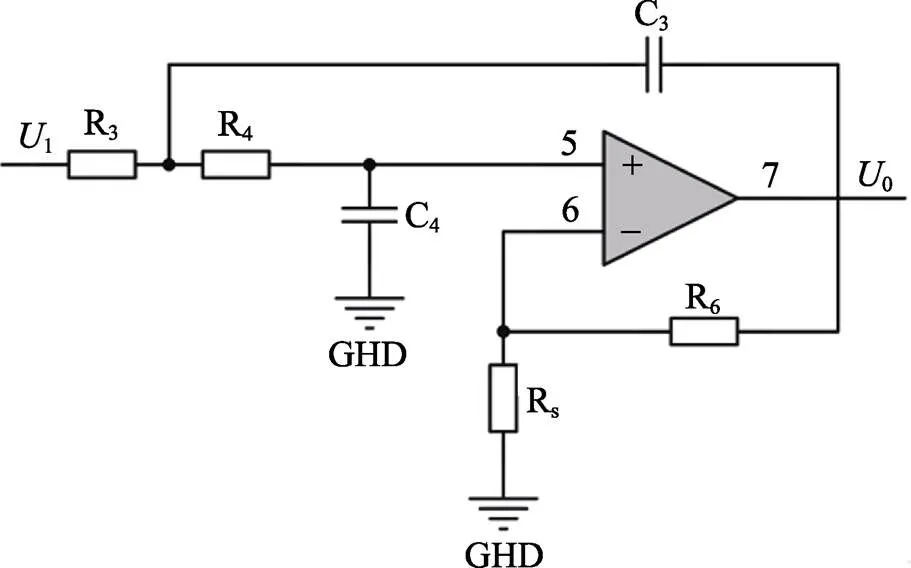
图5 低通滤波器电路
根据基尔霍夫电路定律建立滤波模型:
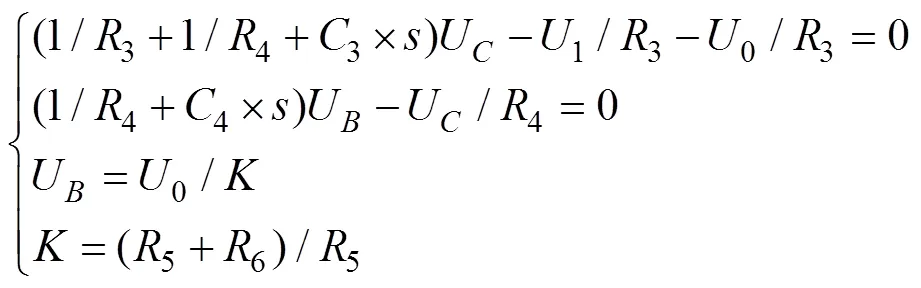
式中为传递函数中的变量。
根据模型可以得到该滤波器的传递函数为

利用二阶低通滤波模型的标准形式:

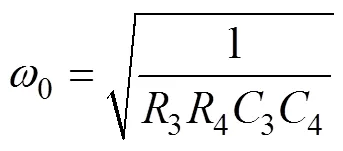

为了保证滤波系统的稳定,系统的全部极点应配置在平面的左半平面,即需满足:

根据上述计算,令3=1000 Ω,4=500 Ω,3=0.1 μf,4=0.01 μF,此时理论截止频率可已达到50 kHz。
3.4 同步信号检测设计
同步传感器用于检测多臂机的运行状态以产生同步信号,采用工控系统中常用的接近开关(C1、C2)。根据其提供的同步信号,嵌入式电子多臂机能自动、智能地按照花型信息执行动作。根据用户的需要,同步传感器产生的同步信号可以发送到工控上位机,再由工控机通过网络模块发送给嵌入式电子多臂机控制板,也可以通过专用信号线直接并行发送给嵌入式电子多臂机控制板,使之脱离工控上位机独立工作。多臂机运行时序图如图6所示。

图6 控制多臂机运行时序图
3.5 性能检测
3.5.1 电磁铁磁性、电流检测
在电子多臂机中,多臂机用的电磁铁是电控系统和机械系统之间的“接口”,电磁铁的响应速度和可靠性在一定程度上影响着多臂机的响应速度和可靠性[7]。高速多路电磁铁和摆臂作为高速电子多臂机系统第一级信号执行机构,对整个多臂机的性能起着至关重要的作用。
将线性霍尔元件安置在电磁铁上,每一个霍尔元件与电磁铁的一路对应,利用光耦及功率放大单元ULN2803为多路电磁铁独立工作提供条件。在每一路电磁铁稳定工作时,霍尔元件会产生相应的电信号,微控制器对这些电信号进行采集,再通过霍尔元件的线性方程,计算出每路电磁铁稳定工作时的磁场,将这些信息传输给工控上位机总控制系统,实现对电磁铁性能的检测。通过在每一路电磁铁中串联电流检测器件,记录随着电磁铁工作时间的变化,流过每一路电磁铁电流。把电磁铁每一路的磁性、电流与正常工作参数比较,记录相应数据及错误信息并在工控上位机中显示及预警[8]。
3.5.2 摆臂运动状态检测
将型号为GL-8HX10的传感器放在摆臂运行的高位,当摆臂运行到位时,微控制器就会收到信号,可以获知摆臂是否正常运动,从而验证多臂机装配是否准确,各零部件质量是否可靠等。
由于控制信号和检测信号电压不同,如果直接相连,会由于电压过高使控制系统无法正常工作,为解决这一问题,通过使用光电耦合器来实现隔离[9],实现低电压控制高电压。图7为光电耦合器电路图。

图7 光电耦合器电路图
3.5.3 油温及液位检测
多臂机箱体由于存在摩擦损失,以及轴承、齿轮等摩擦损失,工作中会产生较多热量。传动装置的热损失不仅对系统的润滑和冷却有重要影响,而且对关键结构部件的正常工作也有很大影响,将会直接影响到机械传动效果和传动系统的动力性能。
在多臂机箱体内放置温度传感器及液位传感器,实时采集多臂机箱体内的温度及润滑油的液位情况[10]。
上述检测的有效数据及错误次数都会在工控上位机中显示,并且将数据上传到数据库中,对多臂机进行记录及跟踪。系统印刷电路板(PCB)图如图8所示。

图8 控制板PCB图
4 系统软件设计
4.1 提花控制
将CAD软件设计的花样文件下载到片外存储器FM24C512中,单片机处于等待状态,当工控上位机向单片机发送指令时,微控制单元按照花样信息执行高低电平变换,使电磁铁按照花样信息执行吸合与释放动作,实现多臂机提花控制[11]。
4.2 性能检测
该测试系统在完成了所需要的测试功能的同时,还实现了测试系统的数字化、图形化和检测自动化等功能,具有界面友好、操作简便等特点。测试传感器在测试系统中的作用是测量数据,并在多臂机运转过程中实时反馈测试信息,起到监测多臂机样机运转状况是否稳定的作用。安装的测试传感器通过其他设备与测试软件相连接,使监测过程始终实时、稳定、高效地进行。
进行远程监控软件的开发:开发基于Windows系统的花型编辑软件,通过工控上位机即可实现对多臂机运行动作的设定[12]。检测界面如图9所示。

图9 监测界面
电子多臂机控制及性能检测系统已经在多臂机生产厂实际使用,用作电子多臂机出厂检测系统不间断运行,反复进行各种提花及性能检测操作测试。使用结果表明,该系统可以稳定、可靠地检测出多臂机装配不当、电磁铁性能不达标、零部件质量问题、润滑油缺少、油温过高等问题,对多臂机的控制和性能检测结果令人满意。帮助生产者验证多臂机性能优劣,不断改进技术优化设备,生产出符合需求的电子多臂机,促进纺织机械的发展。实验平台如图10所示。

图10 实验平台
5 结语
该检测系统现在已经投入使用,实现了摆臂24小时200万次运动检测,达到了企业检测要求,并将检测过程中产生的生产信息储存在数据库,实现了数据的原始积累,该系统目前运行情况良好。
[1] 刘春雷.高速旋转式多臂机机构分析及设计[D].杭州:浙江理工大学,2012.
[2] 沈毅,杨明,邓文俊.基于LabVIEW的3620电子多臂机测试系统研究[J].现代纺织技术,2015, 23(4): 24–28.
[3] 李智.面向离散制造过程的数据采集与处理系统研究与设计[D].南京:南京理工大学,2013.
[4] 宋亚男,陈永安,徐荣华,等.机器人运动控制实验设计与实现[J].实验技术与管理,2013, 30(1): 115–118.
[5] 黄皎,吴明春,陆晓春,等. Wi-Fi与嵌入式设备的融合技术研究[J].计算机工程,2011, 37(8): 244–245.
[6] 孙华敏.面向设备监测的嵌入式数采分析系统软硬件设计与实现[D].北京:北京交通大学,2014.
[7] 郭月洋,陈瑞琪.电子多臂机电磁铁吸合过程分析及加速措施探讨[J].棉纺织技术,2000(10): 16–19.
[8] 熊飞.高速数据采集系统实现及其应用[D].南京:南京理工大学,2017.
[9] 唐玉兵,晏剑辉.光耦电路在智能远程控电系统中的应用[J].数字通信世界,2018(8): 192.
[10] 康伟,郑正奇. Windows下实时数据采集的实现[J].计算机应用研究,2001(3): 105–106.
[11] 凌六一,伍龙.基于软件模拟的51单片机IIC总线的实现[J].电子技术,2004(5): 13–16.
[12] 钟晓强.一种基于VB实现的变频器可视化界面设计[J].电工技术,2010(7): 34–36.
Design of experimental platform for control and performance testing of electronic dobby machine
YU Hongbin1, ZHANG Haopeng1, SHAO Hongyu2
(1. School of Mechanical Engineering, Tianjin Polytechnic University, Tianjin 300387, China; 2. School of Mechanical Engineering, Tianjin University, Tianjin 300072, China)
In view of the need of reliability testing for the newly assembled dobby machine, a control and performance testing system for the dobby machine is designed. By analyzing the working principle of the dobby machine, an embedded microcontroller, pattern data memory, frequency converter and motor drive circuit, dobby electromagnet drive circuit, electromagnet magnetic detection circuit, electromagnet current detection circuit, dobby swing arm motion detection circuit and network communication interface module are designed, which is integrated in the embedded electronic dobby control and performance detection system. The overall performance of the electronic dobby machine can be tested, and the system architecture, hardware circuit design and implementation method, software system design and implementation method of the embedded electronic dobby control system are presented. Practical application in factories shows that the system can be used to control and test whether the performance of the electronic dobby machine meets the requirements of operation.
electronic dobby machine; performance detection; experimental platform
TS103.33;G484
A
1002-4956(2019)11-0079-05
10.16791/j.cnki.sjg.2019.11.020
2019-03-27
国家重点研发计划项目(2016YFB1102003)
于鸿彬(1974—),男,天津,博士,副教授,主要研究方向为智能控制理论及应用。E-mail: 349334292@qq.com