鼹鼠多趾结构特征仿生旋耕刀设计与试验
2019-11-28杨玉婉马云海蒋啸虎李金光
杨玉婉,佟 金,马云海,蒋啸虎,李金光
(1.西北农林科技大学机械与电子工程学院,杨凌712100;2.吉林大学工程仿生教育部重点实验室,长春130025;3.吉林大学生物与农业工程学院,长春130025)
0 引 言
旋耕机耕作功耗较大,约是其他翻整地机械能耗3~6 倍[1-2]。其中,旋耕刀作为旋耕机的主要触土部件[3-6],其几何结构对旋耕机工作质量、功率消耗等具有重要的影响[7]。因而,通过优化旋耕刀几何结构来降低旋耕机功耗是研究学者们的重要研究方向。例如,锯齿型旋耕刀[8]具有较高的除草效率和较好的耕作性能;通过分析传统型、半幅宽型和直型旋耕刀[9]在不同转速下的耕作扭矩和功耗情况,得知直型旋耕刀的耕作扭矩和功耗最小;不同刃口的直型旋耕刀[10]可以形成不同的沟底结构,特别是内刃口旋耕刀切土时土壤回填率高、沟壁未被压实、功耗较小;具有鼹鼠爪趾趾尖结构特征的仿生型旋耕-碎茬刀[11],土壤破碎率和秸秆破碎率均满足国标要求,且功耗要小于传统刀片;此外,仿鼹鼠足趾排列的旋耕-秸秆粉碎锯齿刀片[12],在地表秸秆覆盖率为0和100%时,其扭矩高于国标旋耕刀,在地表秸秆覆盖率为50%,其扭矩低于国标旋耕刀等等。可以看出,目前的研究主要集中在优化旋耕刀刃口结构来减小其用于除草、破碎秸秆、压实沟壁等的扭矩从而实现旋耕机功耗的降低,然而,旋耕机80%的功耗主要消耗在旋耕刀切土和抛土过程中[13],那么,通过优化旋耕刀几何结构来减小其切土扭矩从而达到旋耕机减阻降耗的目的是本文的研究目标和意义。
仿生方法对解决农业工程领域中触土部件阻力大、能耗高的问题具有极大潜力[14-15]。李建桥等[16]学习蜣螂体表触土部位结构特征,设计了凸包型仿生犁,通过土槽试验得到减阻率为6.6% ~12.7%。Ren 等[17-18]根据臭蜣螂头部唇基结构特征和体电位,设计了凸包型和条纹型仿生渗电推土板,结果表明在通电12 V 的条件下,仿生推土板的推土阻力降低了15%~41%。鼹鼠是一种进行严格地下生活的土壤洞穴动物,仅用一个晚上就可以挖掘出91 m 长的洞穴,其优异的挖掘能力,被称为“活的挖掘机”[19]。值得注意的是,鼹鼠的每个手掌都有5 个宽大而锋利的爪趾。当鼹鼠挖掘土壤时,5 个爪趾张开并处于同一平面协同工作,从而实现高效切土,这种结构被称为多趾组合结构[20]。而且,五个爪趾趾尖轮廓曲线在切土过程中起到重要的滑切和刺入作用,增加了切土的高效性。这与若虫时期蝉的前爪切土作用类似,爪趾的滑切行为有助于减小土壤摩擦力和刺入阻力[21]。由此可知,多趾组合结构和趾尖轮廓曲线对鼹鼠的切土性能具有重要影响。
本文将基于鼹鼠多趾组合结构和趾尖轮廓曲线,设计出具有仿生结构特征的旋耕刀,并通过田间试验来研究仿生结构特征对旋耕机田间耕作性能的影响。而且,将传统型旋耕刀作为对照组,其田间耕作性能用于对比分析。
1 仿生旋耕刀设计
1.1 鼹鼠多趾组合结构和趾尖轮廓曲线特征分析
根据文献[22]可知,鼹鼠前肢手掌多趾结构(图1)是一种多窄齿组合结构,且相邻齿间间距可调整。其中,每个爪趾趾长与趾宽的比值m 范围为2.63 ~3.41,相邻爪趾间间距与趾宽的比值n范围为1.12 ~1.60。
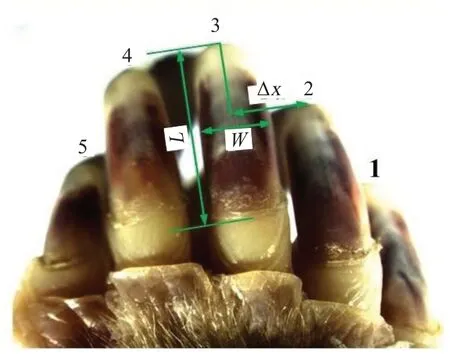
图1 鼹鼠前肢手掌五趾结构[22]Fig.1 Five-claw combination structure of mole rats[22]
鼹鼠前肢手掌五趾趾尖的轮廓曲线对鼹鼠的切土性能具有重要影响。通过逆向工程方法获得5 个爪趾的点云数据,然后在逆性工程软件Imageware 中提取出爪趾趾尖轮廓曲线的点云,并在AutoCAD 2014 软件中得到轮廓曲线点的坐标值,最后将坐标值导入到数据处理软件Matlab 中进行量化分析,如图2 所示。基于最小二乘法拟合5 个爪趾的趾尖轮廓曲线,拟合方程均为二次高斯方程。5个拟合方程的决定系数(R2)均大于0.95,误差平方和均小于0.05,说明拟合曲线接近于5 趾轮廓曲线,能够精确描述5趾趾尖轮廓曲线特征。
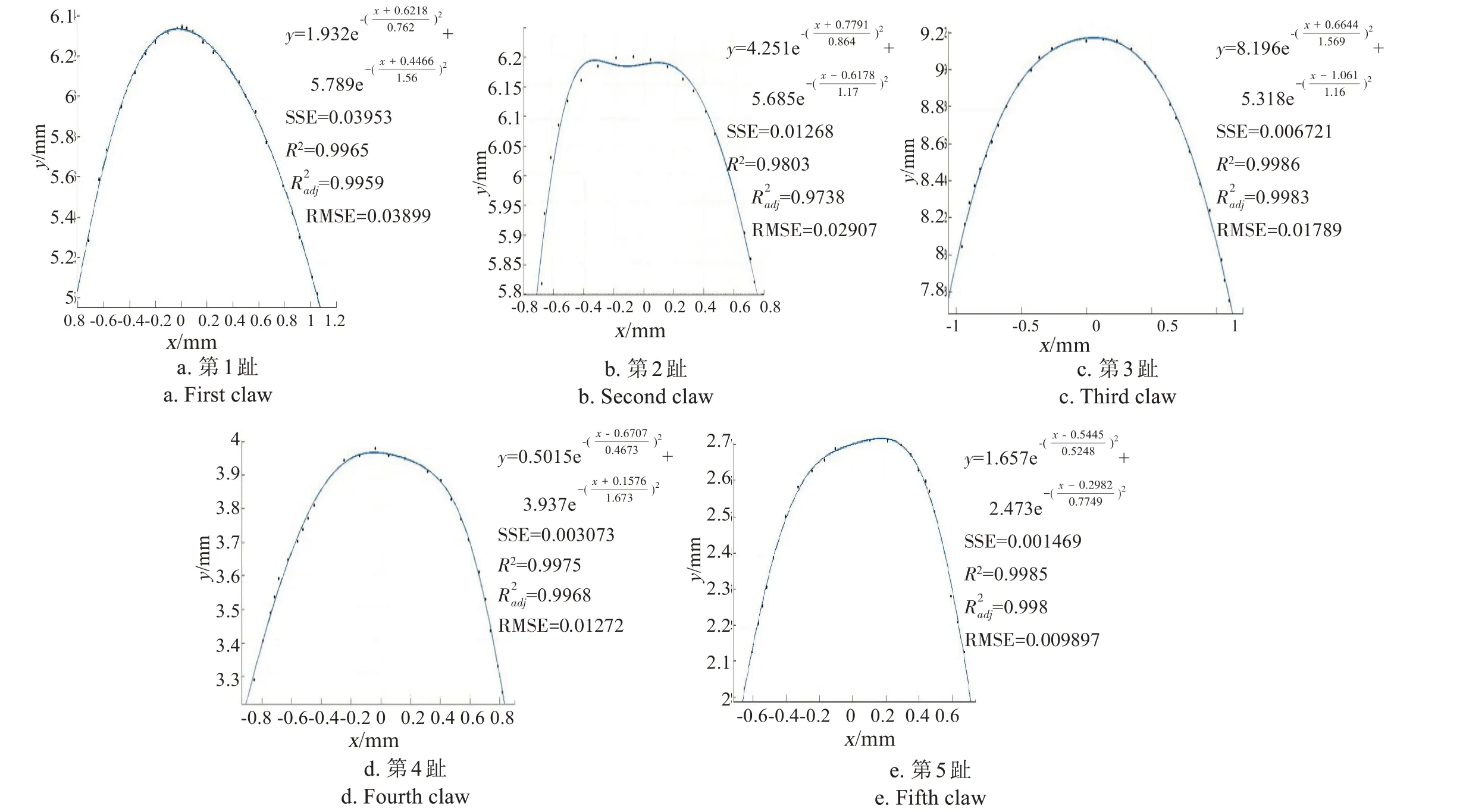
图2 鼹鼠5个爪趾趾尖轮廓拟合曲线和拟合方程Fig.2 Fitting curves and equations of five claws tips of mole rats
1.2 仿生旋耕刀设计
传统旋耕刀由刀柄、具有侧切刃的侧切面、过渡刃的过渡面和正切刃的正切面组成[23],如图3a 所示。旋耕刀侧切面具有切开土垡、切断、推开地面秸秆或杂草等功能,正切面横向切开土壤,具有切土、碎土和翻土的功能,使得旋耕刀整刀功耗较大部分都消耗在正切面上。根据鼹鼠前足爪趾结构特征,结合旋耕刀结构,将5趾组合结构和趾尖轮廓特征曲线应用于旋耕刀正切面上,第1和2趾、第3趾、第4和5趾依次排列于正切刃、刀轴回转半径、正切面末端边缘,如图3b 所示。本研究选用常用的旋耕刀参数,回转半径R为245 mm和工作幅宽b 为60 mm,材料选用60Si2Mn 钢。根据旋耕刀尺寸范围,设置5趾结构总宽w(0图3b)为60 mm,比值m 参照原型结构的数值[22],由于相邻趾间距的可调整性[22],n 值的改变将影响旋耕刀的工作性能,因而选择比值n 为本试验的一个影响因素。5 趾结构的倾斜角度θ(图3b)对旋耕刀的滑切性能有重要影响,因而选择倾角θ 为本试验的另一个影响因素。对于趾尖轮廓曲线,参考第1.1节的拟合曲线方程进行设计。旋耕刀耕作时不仅要受到土壤的侵蚀和磨损,还会受到石砾的冲击、杂质的缠绕等,会造成旋耕刀剧烈磨损和弯折,这就对旋耕刀的材质、机械性能要求较高。本文在旋耕刀毛坯基础上通过线切割加工工艺在旋耕刀正切面上加工出仿生结构特征(加工精度为±0.1 mm,表面粗糙度为0.3~0.8 μm),再对加工表面进行打磨处理,最后进行淬火、回火等热处理工艺。在前期的土槽试验中,n 取值为1.25、1.50 和1.75,θ 取值为50 °、60 °和70 °,经过正交试验,得到优化的仿生型旋耕刀结构参数为:n=1.25和θ=60°。本文根据优化结果加工仿生型旋耕刀,并和传统型旋耕刀用于田间试验与分析。
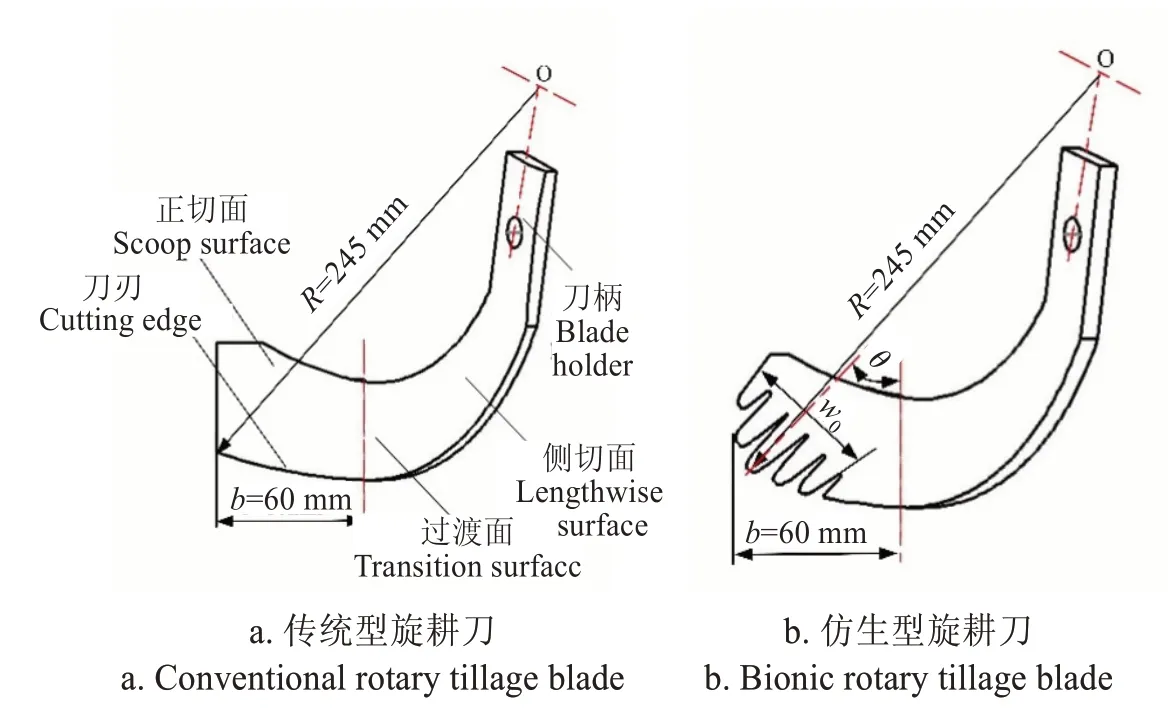
图3 旋耕刀结构示意图Fig.3 Configurations of rotary tillage blades
2 田间试验
2.1 试验材料
田间试验于2018 年10 月中旬在吉林农业大学试验农场进行,选择的试验地块,地表平整无坡度,土壤类型为黑壤土,前茬作物为玉米,耕作方式为平作。试验前,用搂草机清理地表过多的残留物。根据GB/T 5668-2008[24]旋耕试验要求,测得耕前地表植被覆盖量为0.36 kg/m2,耕前地表平整度为2.69 cm,满足旋耕作业要求。对试验区0 ~50、50 ~100、100 ~150 和150~200 mm 的土层用SC-900 型坚实度仪分层测量其土壤坚实度,用TDR-300型水分仪分层测量其土壤含水量,用环刀法[25]分层测量其土壤容重,结果如表1。
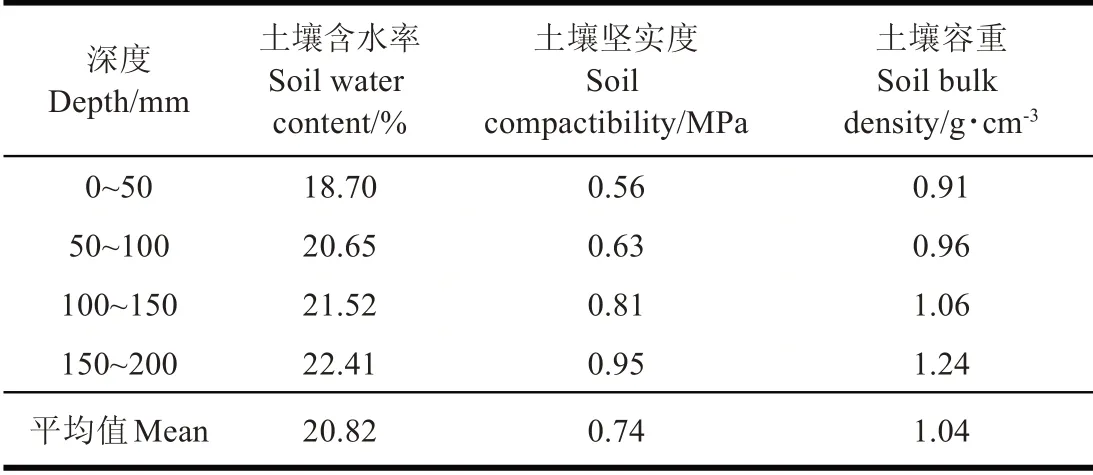
表1 试验区土壤物理性质Table 1 Soil physical properties in test plots
试验系统包括动力输出设备、旋耕机和测试系统,如图4a 所示。动力输出设备为久保田KUBOTA-M954 轮式拖拉机,发动机功率70.8 kW,可输出2 种转速分别为540 和720 r/min。旋耕机由天津拖拉机制造有限公司生产的1GQN-230 框架式旋耕机,作业幅宽230 cm。测试系统包括扭矩测量系统、转速测量装置和耕深测量装置,其中扭矩测量系统是由扭矩传感器(CYB-803S 型,量程0~±1000 Nm)和农机动力学参数遥感仪组成,扭矩传感器与拖拉机动力输出轴和万向联轴器连接,农机动力学参数遥感仪包括电源、无线动态数据采集器、天线和计算机组成,如图4b~4c 所示。旋耕机转速通过SW6234C 激光转速仪测定和确定;耕深测量装置安装在旋耕机后托板上,通过超声波在空气中传播与反射的原理来控制耕深(图4a),首先根据该行程的作业耕深得到刀轴轴线距未耕地表的间距d1,即为刀轴回转半径与耕深的差值;然后调节后托板与旋耕机刀轴轴线平行,通过拖拉机液压升降装置调节旋耕机缓慢上下移动,直至耕深测量装置的测得值在d1±1cm 范围内。农机动力学参数遥感仪的工作原理是扭矩传感器受到外力的作用,将力信号转换为电信号,并被传输到无线动态数据采集器中,然后将电信号发射出去,通过天线接收到电信号并转换成力信号传输给计算机,最后显示在数据处理软件的界面中。
2.2 试验方法
在田间耕作性能试验中,传统IT245 型旋耕刀和仿生型旋耕刀各62把按双螺旋线对称排列方式安装在2行旋耕机上,测量和观察2 种旋耕刀在不同机组前进速度、转速和耕深条件下的整机扭矩、功耗、土壤破碎率和沟底压实现象。根据GB/T 5668-2008[24]旋耕作业参数要求,机组前进速度设置为1、2、3、4和5 km/h,转速设置为254和267 r/min,耕深设置为80、120 和160 mm。当机组前进速度变化时,转速和耕深分别为254 r/min 和120 mm;当转速变化时,机组前进速度和耕深分别为3 km/h 和120 mm;当耕深变化时,机组前进速度和转速分别为3 km/h和254 r/min。试验时,每个试验区长50 m,两端各留出取10 m 作为过渡区,中间30 m 为数据采集区。每一工况测试3个行程,最后取平均值用于结果分析。
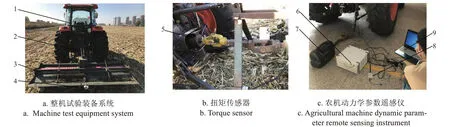
图4 试验装备系统Fig.4 Test equipment system
2.3 试验指标
2.3.1 旋耕机功率
拖拉机需要提供足够的功率来满足旋耕机切土时的功率消耗。因此,旋耕机功耗应低于拖拉机的额定功率。根据文献[10]中旋耕机功率的计算方法,可得到本文旋耕机的作业功率:
式中P为旋耕机耕作功率,kW;T为旋耕机耕作扭矩,N·m;n0为旋耕机刀轴转速,r/min,其中,旋耕机耕作扭矩通过扭矩测量系统获得。
2.3.2 土壤破碎率
土壤破碎率是评价旋耕刀田间耕作性能的重要指标。根据GB/T 5668-2008[24]的土壤破碎率测量方法,在已耕地上测定0.5 m×0.5 m 面积内的全耕层土块,土块大小按其最长边分为小于4、4~8 cm 和大于8 cm 三级。并以小于4 cm 的土块质量占总质量的百分比为土壤破碎率,如式(2)所示。每个行程随机测量5 点。

式中Sb为土壤破碎率,%;m总为测定区内全耕层土块总质量,g;m4为测定区内最长边大于4 cm的土块质量,g。
2.3.3 沟底压实情况
旋耕刀在切土过程中有压实沟底的现象[26-27]。压实现象是刀片背面快速滑离土壤时,对沟底土壤表面施加应力而形成的较薄一层压实面,造成该层土壤结构破坏和土壤空隙度降低等现象[10]。特别是,这样的一层土壤压实面会阻碍空气和水分的移动,也影响植物根系植入土内,增加种苗的死亡率。同时,压实过程会增加旋耕刀耕作功耗,降低耕作效率。因此,沟底压实现象对于评价旋耕刀田间耕作性能的具有重要意义。在旋耕作业完成之后,用小铲轻轻移出耕层土块,露出沟底,且不破坏沟底状况,并拍照观察。
2.3.4 旋耕机其他田间耕作性能测试项目和方法
根据GB/T 5668-2008[24]中对旋耕机耕作质量的规定和测量方法,本研究的旋耕机其他田间耕作性能测试项目和方法如下:
1)耕深稳定性
用钢尺测得,沿机组前进方向每隔2 m 左右两侧各测定一点,每个行程总测点数不少于20 个,并计算行程的耕深平均值和工况的耕深平均值,以及行程的耕深稳定性和工况的耕深稳定性[24],计算方式如下:
行程的耕深平均值:

式中aj为第j 个行程的耕深平均值,mm;aji为第j 个行程第i个点的耕深值,mm;nj为第j个行程的测定点数。
工况的耕深平均值:

式中a为工况的耕深平均值,mm;N为同一工况的行程数。
行程的耕深稳定性:

式中Sj为第j个行程的耕深标准差,mm;Vj为第j个行程的耕深变异系数,%;Uj为第j个行程的耕深稳定性系数,%。
工况的耕深稳定性:
式中S为工况的耕深标准差,mm;V为工况的耕深变异系数,%;U为工况的耕深稳定性系数,%。
2)耕宽稳定性
用皮卷尺测得,沿机组前进方向每隔2 m 测定一次耕宽,每个行程总测点数不少于20 个,并计算行程的耕宽平均值和工况的耕宽平均值,以及行程的耕宽稳定性和工况的耕宽稳定性,计算方式按照耕深相关数值的计算方法。
3)植被覆盖率
在耕前,在测量区内对角线上取5点,每点按1 m2面积紧贴地面剪下露出地表的植被,称其质量Wq,并计算出5 点的平均值(一般地,耕前地表植被覆盖量应不大于0.6 kg/m2)。按照该测量方法,在耕后,测得1 m2面积紧贴地面的植被,称其质量Wh,然后计算植被覆盖率:

式中Fb为植被覆盖率,%。
4)地表平整度
沿垂直于机组前进方向,在地表最高点以上取一水平基准线,在其适当位置上取一定宽度(与样机耕宽相当),分成10等分,测定各等点至地表的距离h0,如图5所示。然后,按照耕深相关数值的计算方法计算平均值和标准差,并以标准差的平均值来表示其平整度。
5)土壤蓬松度
根据地表平整度的测量方法,在耕前,测得水平基准线各等点至地表的距离h1。然后按照如下方法计算出土壤蓬松度:

式中Pt为土壤蓬松度,%;h0为耕后水平基准线至地表的距离,mm;h1为耕前水平基准线至地表的距离,mm。
3 试验结果与分析
3.1 旋耕机功率
图5 为传统型和仿生型旋耕刀在不同前进速度、转速和耕深条件下的整机功率变化情况。由图可知,传统型和仿生型旋耕刀在不同耕作条件下的整机功率变化趋势相同,但是仿生型旋耕刀的整机功率总小于传统型旋耕刀的整机功率。如图5a所示,当前进速度从1 km/h 增加到2 km/h 时,整机功率迅速增大;前进速度增加到3 km/h 时,整机功率较快减小;最后,前进速度增加到5 km/h 时,整机功率缓慢增加。这与Ghosh[28]研究旋耕刀在不同前进速度下耕作时,扭矩线性增加的结果类似。该过程中,仿生型旋耕刀的整机功率比传统型旋耕刀的整机功率小8.80%~22.15%,平均减小16.88%。如图5b所示,传统型和仿生型旋耕刀的整机功率均随转速的增加而减小,这与Matin[10]研究旋耕刀在转速125~375 r/min下耕作时的变化规律类似,其中仿生型旋耕刀的整机功率比传统型旋耕刀的整机功率小15.38%~18.61%,平均减小17.00%。如图5c所示,传统型和仿生型旋耕刀的整机功率均随耕深的增加而增大,同样地,Ghosh[28]在研究旋耕刀在不同耕深下耕作时,扭矩也有这样的变化规律,其中仿生型旋耕刀的整机功率比传统型旋耕刀的整机功率小10.83%~35.97%,平均减小21.80%。
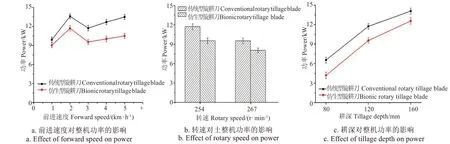
图5 不同耕作条件下的旋耕机功率Fig.5 Power of rotary cultivators at different tillage conditions
整体来看,仿生几何结构对旋耕刀的整机功率有显著影响。鼹鼠前肢手掌多趾组合结构和趾尖轮廓曲线对降低旋耕机功耗起着重要作用,这是由于当仿生旋耕刀入土时,多趾结构较容易刺入土壤,并且趾尖轮廓曲线具有较好的滑切性能,可减小摩擦阻力,从而使得仿生旋耕刀具有较好的入土性能,这类似于仿生切茬刀[11-12]的锯齿状结构性能;随着仿生旋耕刀入土深度的增加,多趾组合结构将起着重要的切土作用,由于该结构可以有效地减小土壤失效时的破裂半径[29],使得土壤失效楔块变小,从而切削阻力明显降低。因此,多趾组合结构较低的土壤切削阻力和五趾趾尖的优异入土性能和滑切效果,才使得仿生型旋耕刀耕作时具有减阻降耗性能。
3.2 土壤破碎率
如图6a 所示,传统型和仿生型旋耕刀的整机土壤破碎率随着前进速度从1 km/h 增加到5 km/h 均降低。如图6b 所示,传统型和仿生型旋耕刀的整机土壤破碎率随着转速从254 r/min 增加到267 r/min 均增加。如图6c 所示,传统型和仿生型旋耕刀的土壤破碎率随着耕深从80 mm增加到160 mm 均稍微降低。由于旋耕机土壤破碎率大小与切土节距具有重要关系[30],当前进速度增加时,旋耕刀每次切土量增加,切土节距增大,使得被切土块较大,因而旋耕机的土壤破碎率降低;当转速增加时,旋耕刀每次切土量减少,切土节距减小,使得被切土块较小,因而旋耕刀的土壤破碎率增大;当耕深增大时,虽然旋耕刀切土节距不变,但是切土体积增加,被切土块较大,因而旋耕刀的土壤破碎率随着降低。整体来看,传统型和仿生型旋耕刀在不同耕作条件下的整机土壤破碎率在数值上相差不大,均在95%以上,满足旋耕机田间耕作要求[24]。
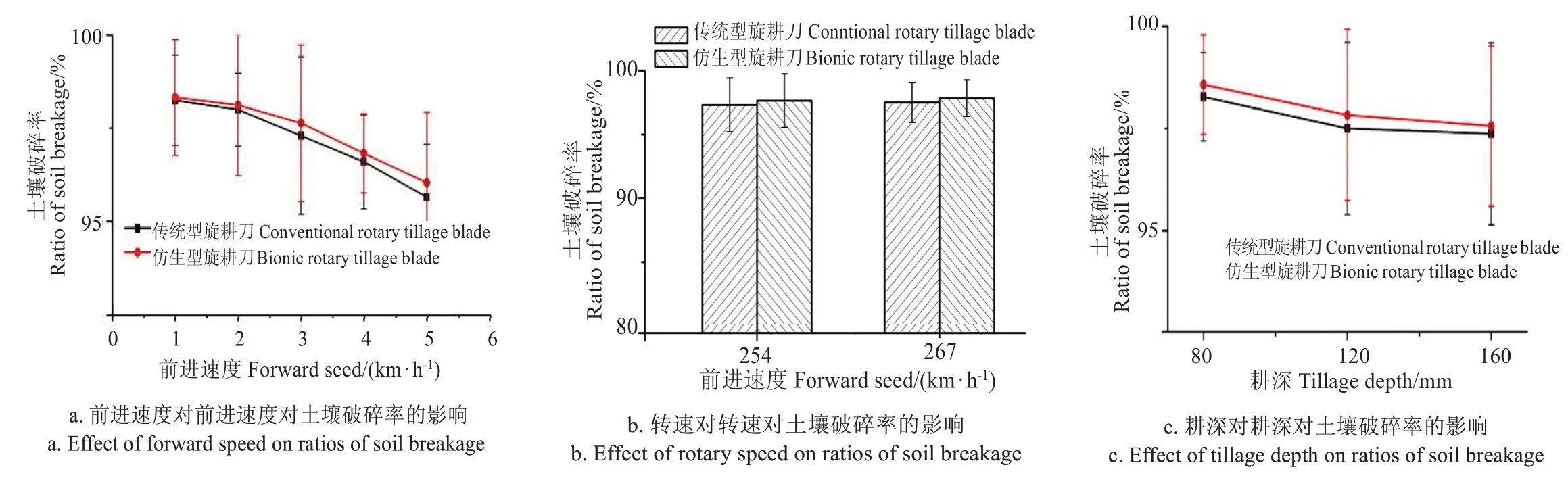
图6 不同耕作条件下的旋耕机土壤破碎率Fig.6 Ratios of soil breakage of rotary cultivators at different tillage conditions
3.3 沟底压实情况
图7 为传统型和仿生型旋耕刀对沟底的压实情况。由于仿生型旋耕刀的正切面具有多趾组合结构特征(图3b),因而在切土时会在沟底产生很多划痕,从而形成粗糙的沟底(图7b),减弱了压实现象。然而,传统型旋耕刀,具有较钝的正切面刃口,耕后的沟底光滑,有压实现象(图7a),从而阻碍秧苗根系的正常生长。在切土过程中,传统型旋耕刀正切刃背面快速滑切出沟底,较高的应力作用于沟底表面,产生一层被压实的表面,这种现象出现在传统型旋耕刀所有的耕作条件。而且,由图7a可看出,传统型旋耕刀耕后的沟脊高而宽,使得沟底平整度降低,耕作效果不佳。然而,仿生型旋耕刀可以显著地降低耕后沟底被压实的风险,降低刀背被压入土现象,减小对未耕土壤的扰动,形成平整沟底,从而进一步减小耕作功耗。在Matin等[10]研究不同刃口的旋耕刀所形成的沟底结构时,也对于压实现象进行了讨论,发现内刃口和钝口刀型所形成的沟壁无压实现象,也有助于进一步降低功耗。
3.4 田间耕作质量对比
为了进一步了解传统型和仿生型旋耕刀的田间耕作性能,根据GB/T 5668-2008[24]的试验方法对耕深稳定性、耕宽稳定性、耕后地表植被覆盖率、耕后地表平整度和土壤蓬松度进行了测量,结果如表2。可以看出,2 种类型旋耕刀在不同耕作条件下的耕深稳定性(大于85%)、耕宽稳定性(大于95%)、耕后地表植被覆盖率(大于95%)、耕后地表平整度(小于5 cm)和土壤蓬松度(大于14%)在数值上相差不大,且均满足国标[24]的要求。而且,仿生型旋耕刀的耕作扭矩和功率均小于传统型旋耕刀,土壤破碎率稍大于传统型旋耕刀,特别是可以减少沟底压实现象,沟底平整度,可提高耕作质量。然而,在耕作过程中,仿生型旋耕刀的多齿结构间有一些塞土和塞杂草的现象,当填塞量较多时仿生结构特征对旋耕机的减阻降耗效果不明显。
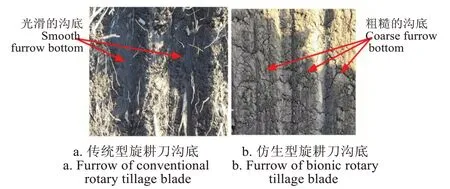
图7 传统型和仿生型旋耕刀对沟底的压实情况Fig.7 Smearing of furrow bottoms caused by conventional and bionic rotary tillage blades
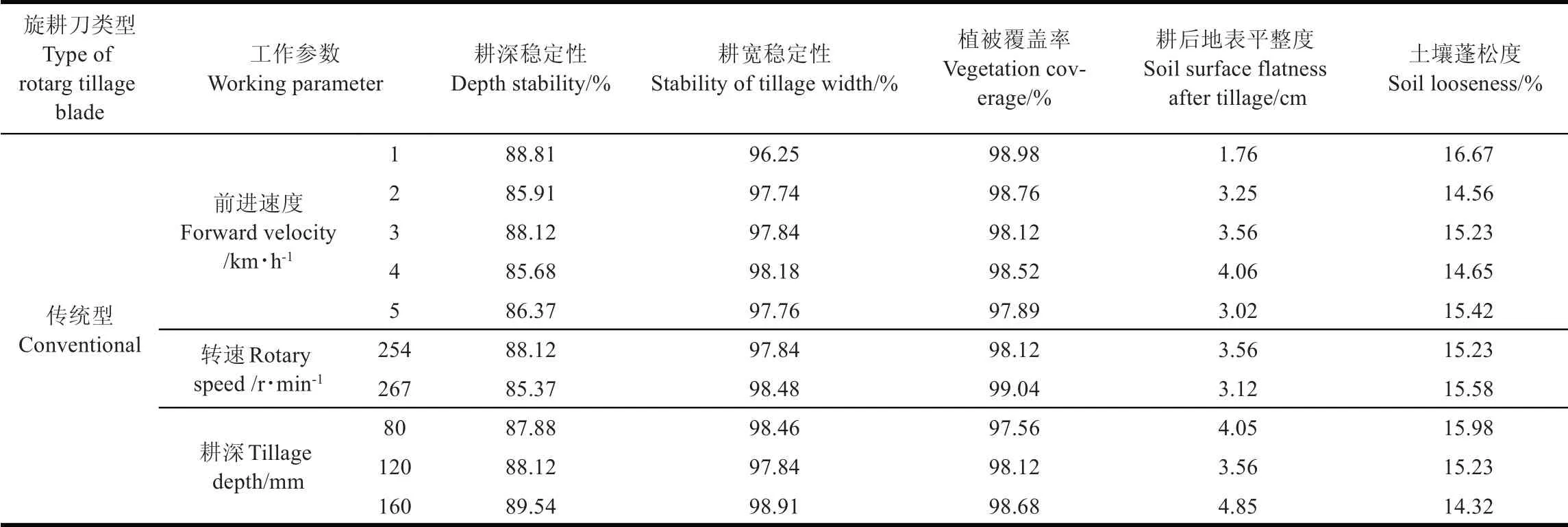
表2 传统型和仿生型旋耕刀的田间耕作性能Table 2 Field tillage performance of conventional and bionic rotary tillage blades
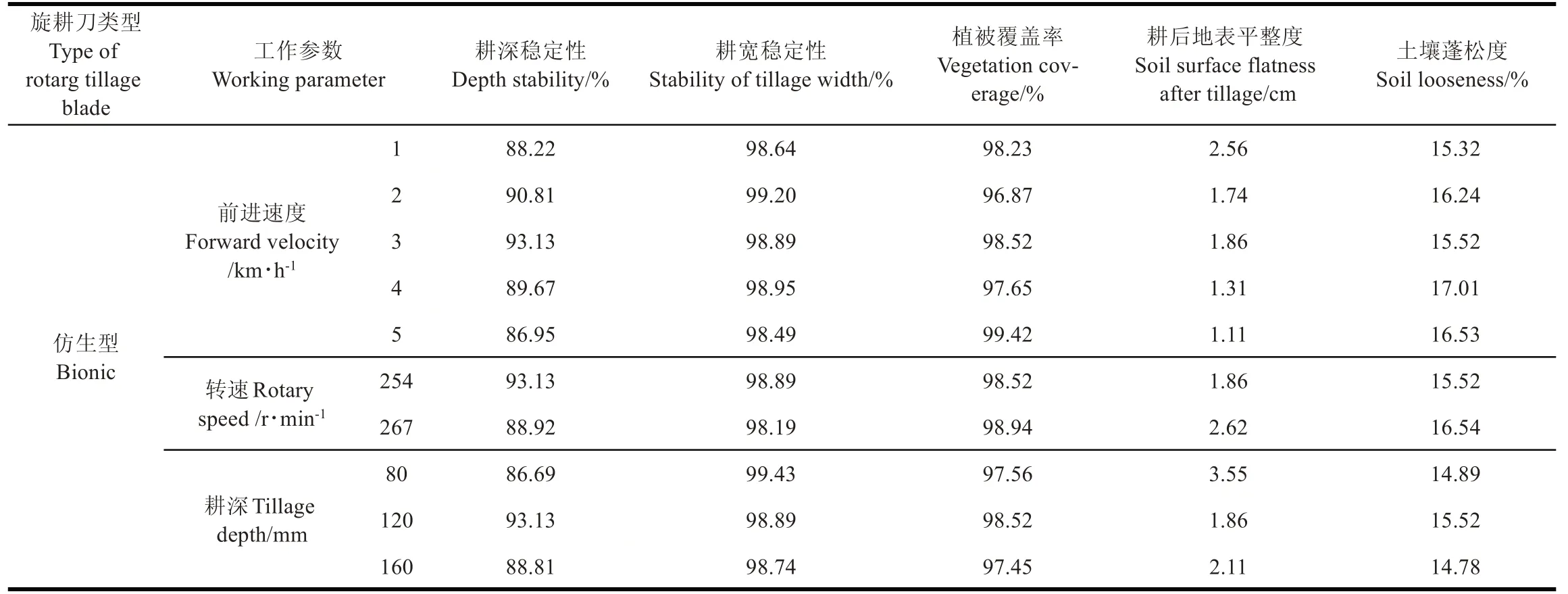
续表2 传统型和仿生型旋耕刀的田间耕作性能Continued table 2 Field tillage performance of conventional and bionic rotary tillage blades
4 结 论
1)本文分析了鼹鼠前肢手掌多趾组合结构和趾尖轮廓曲线特征,利用二次高斯方程拟合5个趾尖轮廓曲线,拟合度R2均大于0.95,拟合误差平方和SSE均小于0.05。
2)根据鼹鼠多趾组合结构特征和趾尖轮廓拟合曲线,设计了具有仿生结构特征的旋耕刀,并将得到最优仿生型旋耕刀(相邻爪趾间间距与趾宽的比值n=1.25 和5趾结构的倾角θ=60°)用于田间试验。
3)田间试验结果表明,传统型和仿生型旋耕刀的整机功率和土壤破碎率变化趋势相同,其中仿生型旋耕刀的整机功率总是小于传统型旋耕刀的整机功率,具体地,当前进速度从1 km/h 增加到5 km/h 时,仿生型旋耕刀的整机功耗平均减小16.88%;当转速从254 r/min 增加到267 r/min 时,仿生型旋耕刀的整机功耗平均减小17.00%;当耕深从80 mm 增加到160 mm 时,仿生型旋耕刀的整机功耗平均减小21.80%。
4)传统型旋耕刀的正切面刃口较钝,耕后沟底光滑,有明显的压实现象,将阻碍秧苗根系的正常生长。然而,仿生型旋耕刀的正切面具有多趾组合结构特征,耕后沟底有很多划痕,从而减弱了压实现象,具有较好的耕作效果。
5)传统型和仿生型旋耕刀在不同耕作条件下的整机土壤破碎率、耕深稳定性、耕宽稳定性、耕后地表植被覆盖率、耕后地表平整度和土壤蓬松度在数值上相差不大,且均满足国标要求。
