蚯蚓仿生注液沃土装置设计与试验
2019-11-28张东光左国标佟金张智泓
张东光,左国标,佟金,张智泓※
(1.太原理工大学机械与运载工程学院,太原030024;2.土壤环境与养分资源山西省重点实验室,太原030031;3.昆明理工大学农业与食品学院,昆明650500;4.吉林大学生物与农业工程学院,长春130025)
0 引 言
利用农机具改变耕层土壤地貌,人为创造土壤洞道,改善耕层土壤结构,可以达到蓄水保墒、减少水土流失和风沙扬尘的目的。仿生注液沃土的技术思路是通过学习土壤动物改变耕层土壤性状的方式,构建土壤洞道并施加液体肥,从而提高土壤肥力,促进作物根系生长[1-2]。依据该技术思路设计的沃土装置,通过挤压土壤形成洞道或裂隙,调节土壤孔隙度,控制耕层水分[3-6],并采用注射液体肥的方式增加耕层含水率和养分含量[7-9]。仿生注液沃土技术改善了耕层土壤的理化性状,为土壤动物生存、农作物生长创造有利的生态环境[10-13]。
亿万年来,蚯蚓进化出优异的生存本能,适应、改造了土壤环境,具有精巧的生物形态[14-15]。蚯蚓在土壤中运动,背孔不断分泌出黏性体液,溶解大量的氧气,并顺着节间沟浸润体表,形成液体保护膜[16-17]。蚯蚓在耕层土壤中构建洞穴而不粘附土粒,体表粘液的作用不可忽视[18-19]。蚯蚓脱附减阻的机理在于,蚯蚓在构建洞道过程中,体表粘液形成润滑层,减小了蚯蚓运动的阻力[20]。并且,蚯蚓的环节结构减小了体表与土壤的接触面积,破坏了界面水膜的连续性,降低了土壤对体表的粘附力,表现出良好的减阻性能[21-23]。将蚯蚓在土壤中运动的脱附减阻特性应用于注液沃土工作部件,对减小土壤与部件之间的粘附具有积极的意义[24-26]。
本研究从蚯蚓运动、黏液分泌和体表结构耦合形成的优异减阻性能获得启示,借助工程仿生技术手段和方法[27-35],仿照蚯蚓构建洞穴改良土壤的生存方式,设计仿生注液沃土装置,期望达到改善土壤结构,增加耕层肥力的目的。在此基础上,以最小工作阻力和土壤粘附量为优化目标,在保证所要求的土壤洞道或液体沃土质量前提下,优选仿生注液沃土装置样机类型,分析前进速度、入土深度、注液量与装置土壤粘附量、工作阻力之间的关系,求解仿生注液沃土装置最优工作参数,提高装置工作过程的脱附减阻性能。
1 材料与方法
注液沃土机具主要由深松铲和仿生注液沃土装置2部分组成,工作原理为:在拖拉机牵引下,前置深松铲在地表开出具有一定深度的沟槽,注液沃土装置的锥形轮廓挤压、分离土壤,肥箱中的液体肥在压力作用下进入装置内部,并由注液孔不断流出充盈装置环槽,浸润部件表面,渗入耕层土壤,如图1 所示。注液沃土装置随拖拉机牵引向前运动,一方面在耕层土壤洞道内施加液体肥,另一方面液体肥与装置的环状结构相配合,在装置外表面与土壤之间不断形成水膜,降低仿生注液沃土装置与土壤之间的黏附力和摩擦阻力。
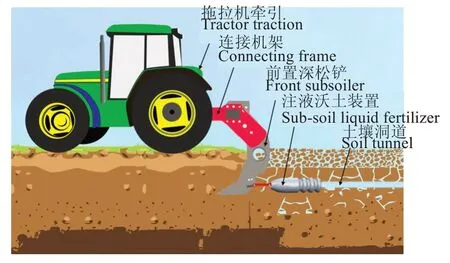
图1 注液沃土机具工作示意图Fig.1 Schematic diagram of sub-soil liquid fertilizer
1.1 蚯蚓体表结构轮廓曲线的提取
本文以赤子爱胜蚓(Eisenia foetida)为仿生对象。该类蚯蚓为广布品种,体长50~60 mm,体宽3~5 mm,体节数在90~110 节之间,体呈暗红色。使用体视显微镜观察并拍摄其分泌体液时的体表特征照片,采用数学分析软件Matlab 2013,从体视显微镜图片中检测并提取蚯蚓体表外缘轮廓。蚯蚓头部(图2a)是运动时首先接触并锲入土壤的部位,其外缘轮廓可作为注液沃土装置外部曲线,提取蚯蚓头部几何结构表面的轮廓曲线,如图2b所示。轮廓曲线方程的拟合优度是保证设计精度和加工难易度的重要环节,精度过低,曲面结构设计不可靠;精度过高,又会增加样机的加工难度。经比较,本文选用二次多项式函数作为蚯蚓头部轮廓曲线的拟合方程,如式(1)所示。
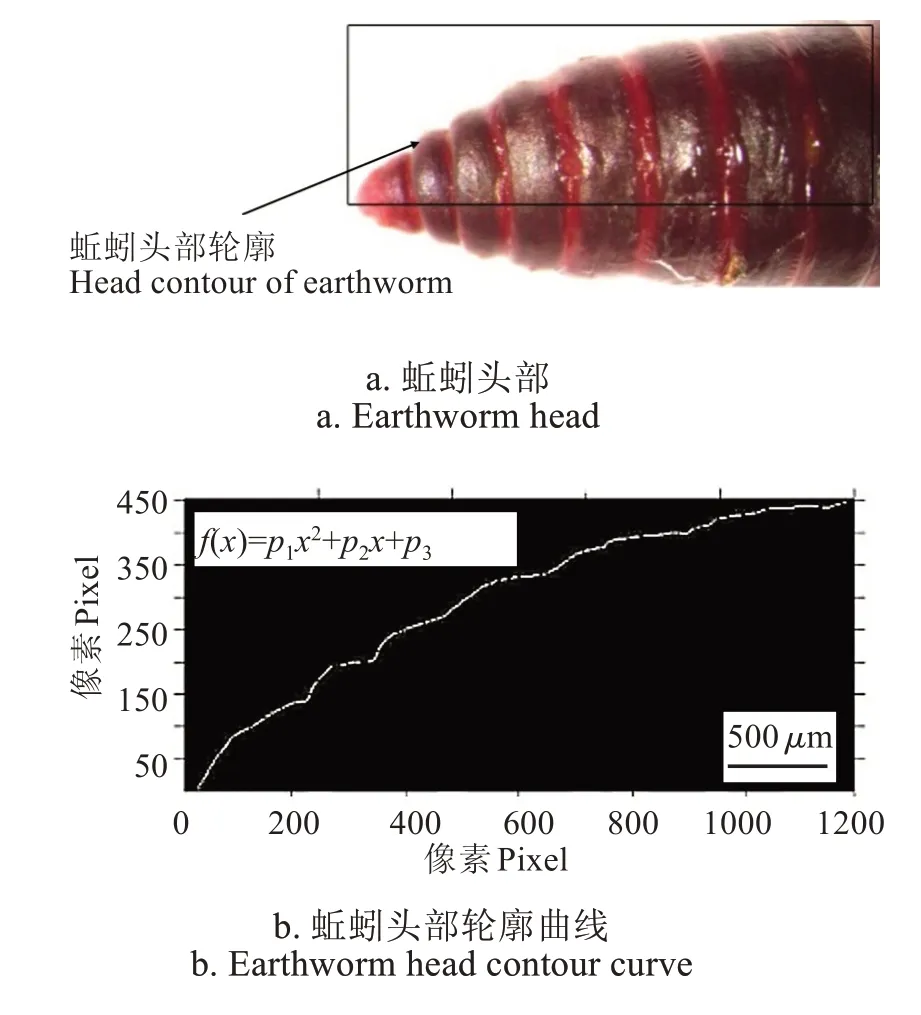
图2 蚯蚓头部及其轮廓曲线Fig.2 Earthworm head and its contour curve

式中p1的取值范围为-0.005~-0.003,p2的取值范围为0.8至0.9,参数p3的取值范围为1.2~1.5,拟合优度R2为0.99,标准误差RMSE为0.79。
蚯蚓体节的几何结构(图3a)降低了体表与土壤的接触面积,峰谷交错的节间沟波纹结构破坏了体表与土壤之间水膜的连续性,降低了土壤黏附阻力,该结构可作为注液部件的表面轮廓。蚯蚓体节几何结构轮廓曲线(图3b)的拟合方程为傅里叶级数方程,如式(2)所示。

式中a0的取值范围为6.0~6.2,参数a1的取值范围为2.3~2.5,参数b1的取值范围为1.5~1.8,参数w 的取值范围为0.25~0.27,拟合优度R2为0.95,标准误差RMSE为0.48。
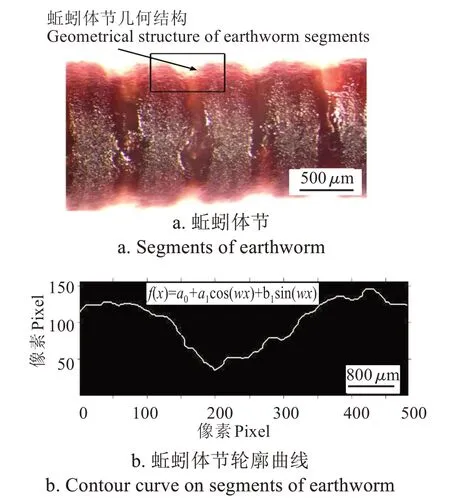
图3 蚯蚓体节几何结构轮廓曲线Fig.3 Contour curve of earthworm segment geometry
1.2 注液沃土装置仿生结构参数设计
通过对蚯蚓头部、体节几何结构特征进行量化分析,根据外缘轮廓的几何特征曲线构建仿生注液沃土装置的几何结构表面。注液沃土装置由仿照蚯蚓头部轮廓曲线设计的锥形触土部件和仿照蚯蚓体节特征曲线设计的带有几何结构表面的管状注液部件组成。注液部件表面峰谷交错,仿蚯蚓背孔排布方式,在波谷内设计3 个斜向防堵塞注液孔。为提高注液的均匀性,在3 孔注液部件的基础上,改进设计双侧6 孔型注液部件。采用参数化建模软件Creo 2.0(PTC Corporate Headquarters, Needham,USA)构建的注液沃土装置3D结构如图4所示。

图4 仿生注液沃土装置结构Fig.4 Structure of bionic sub-soil liquid fertilizer
与蚯蚓洞道类似,草原上的鼠洞同样具有蓄水和排水的作用。鼠洞裂隙内含有一定水分,可以保持洞内湿润;鼠洞群地下排布纵横交错,有利于及时排空降水,保持鼠洞结构[36-37]。有研究者调查了草原田鼠(Microtus pennsylvanicus)的鼠洞尺寸[1],本文参考鼠洞直径设计注液沃土装置的结构尺寸,将外径设定为40 mm,内径设定为20 mm,装置长度设定为135 mm。锥形触土部件起到挤压、分离土壤的作用,轮廓曲线方程如式(3)所示。

式中x的取值范围为25~60 mm。
装置在土层中运动时,管状注液部件的几何结构表面起到脱附减阻的作用,设定管状部件上有3 个注液环槽,轮廓曲线方程如式(4)所示。

式中x的取值范围为5~25 mm。
液体肥入口、注液孔与管状部件内径分别连通,采用计算机流体力学方法仿真计算注液沃土装置内部流场的出口压力和各出口速度矢量[1]。依据出口压力大提高注液孔防堵性能、各出口流速均匀有助于液体肥料均匀喷施的原则,设计的仿生注液沃土装置尺寸参数如图5所示。
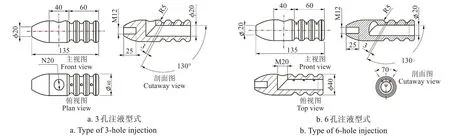
图5 仿生注液沃土装置尺寸参数Fig.5 Dimension parameters of bionic sub-soil liquid fertilizer
1.3 注液沃土装置材质及配套深松铲
超高分子量聚乙烯(UHMWPE)具有耐磨损、耐腐蚀和表面疏水等优异性能,可降低土壤粘附量,并减小肥液流动时装置内壁产生的能量损失。选用密度为0.95 g/cm3、摩擦系数为0.17、吸水性为0.01%的UHMWPE作为注液沃土装置的加工材料,进一步减小土壤对装置的粘附,降低工作阻力。
作业过程中,为避免注液沃土装置锥形触土部件承受过高的工作阻力,选择课题组前期研制的仿生深松铲作为配套机具。该深松铲采用了仿照穿山甲鳞片外表面设计的棱纹形深松铲刃,以及仿照小家鼠爪趾纵剖面轮廓线设计的指数曲线型深松铲柄,其中铲刃间隙角为4°,铲柄宽60 mm,厚30 mm[38]。
1.4 土槽试验
采用吉林大学生物与农业工程学院农业机械实验室的土槽台车试验系统进行仿生注液沃土装置样机测试。通过控制土槽台车的速度和仿生注液沃土装置的工作参数,以仿生注液沃土装置的土壤粘附量、工作阻力为考核指标,共进行8 类样机的对比试验,遴选出土壤粘附量和工作阻力较小的样机类型。根据试验优化设计原理,分析前进速度、入土深度、注液量与仿生注液沃土装置土壤黏附量、工作阻力之间的关系,优化装置的工作参数。
土槽试验系统由土壤、台车、数据采集3 个子系统组成,如图6 所示。土槽长45 m,宽2.8 m,土壤深度1.8 m,土壤物理特性参数如表1 所示。土槽两边铺设导轨,台车系统在导轨上运行。土槽台车主要由机架、行走、动力和控制等部分组成。
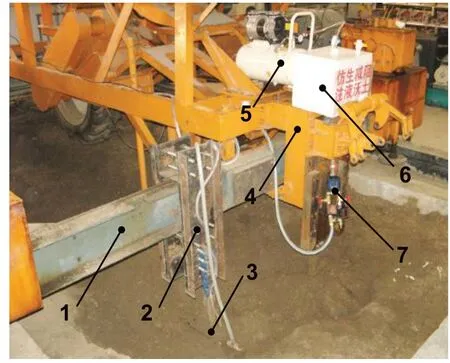
图6 土槽试验系统Fig.6 Soil bin testing system

表1 试验土壤物理特性参数Table 1 Soil physical property parameters
拉压力传感器两端分别连接深松铲与仿生注液沃土装置,可以有效测定仿生注液沃土装置的工作阻力。机具的注液系统安装在土槽台车的活动台架上,可在台车横梁上左右移动。注液系统由空气压缩机(0.7 MPa,台州,中国)、肥液箱(聚丙烯材质,自制)、数字式液体涡轮流量计(K24型,温州永嘉,中国)组成。空气压缩机开启后,用调压阀调节气压,将肥液箱中的液体肥输送至装置内部,通过数字流量计读取液体的质量、流量,采用快速开关阀门开启和关闭注液功能,实现对装置注液过程的控制。土槽台车通过机架连接并牵引深松铲和仿生注液沃土装置运动。在土槽台车牵引行进过程中,数据采集系统记录仿生注液沃土装置的工作阻力;台车停止后关闭注液系统,采用称质量法测定仿生注液沃土装置的土壤粘附量。
1.4.1 工作阻力及土壤粘附量测试方法
注液沃土装置与仿生深松铲通过全桥式应变传感器(H3-C3-6B 750 kg,ZEMIC,China)连接。在土槽车牵引样机运动过程中,传感器将拉力信号传递至应变式传感器信号放大器(RW-ST01A,SMOWO,China)。经放大器调理后,拉力信号由数据采集卡(myDAQ, National Instruments, USA)传送至计算机。基于LabVIEW 2014(National Instruments,USA)虚拟仪器平台设计了工作阻力数据采集程序。程序设定采样频率为100 Hz,经拉力—电压标定曲线换算得到工作阻力,并调用虚拟示波器显示。所有采样值经输出模块存储为文本文件后,完成对工作阻力的数据采集过程。在进行工作阻力测试前,需要对拉力传感器进行标定。传感器与数据采集系统相连通,通过万能试验机均匀加载拉力,由数据采集卡的测试面板读取并记录电压值,标定完成后可以得到拉力—电压之间对应的关系曲线。将标定数据输入至Lab-VIEW 2014 参数管理模块MAX Automation Explorer,采集程序通过电压信号计算实际工作阻力。
在装置到达出土调整区之后,关闭注液系统,采用称质量法测量装置的土壤粘附量。称量时,用毛刷剥离粘附在注液沃土装置上的土壤,收集于密封袋之中,然后立即用电子天平称量土壤质量。
1.4.2 试验区划分
试验准备阶段在土槽内撒少量水并翻整土壤,深度达到40 cm;之后镇压土壤,确保地表平整均匀;多点测量土槽测试区内土壤的含水率和坚实度,误差分别控制在5%和10%以内,确保土壤物理条件的一致性。由于注液沃土装置工作后会改变土壤物理参数,为保证试验准确性,需要分区安排,整地一次后可以完成一组完整的试验。试验区划分如图7 所示:在土槽中选择40 m 作为试验区,分为A-H 测试区,每个测试区长7 m,宽1 m。为获得土槽台车稳定的前进速度,在测试区前后分别设置了入土和出土调整区各2 m,仅对台车进入测试区后的数据进行采集并作为测定值。全部试验完成之后,重复翻整、晾晒、镇压土槽测试区内的土壤,在试验前测量土壤的含水率和坚实度,在规定的误差范围内重复测试3次,取平均值作为最终测试结果。
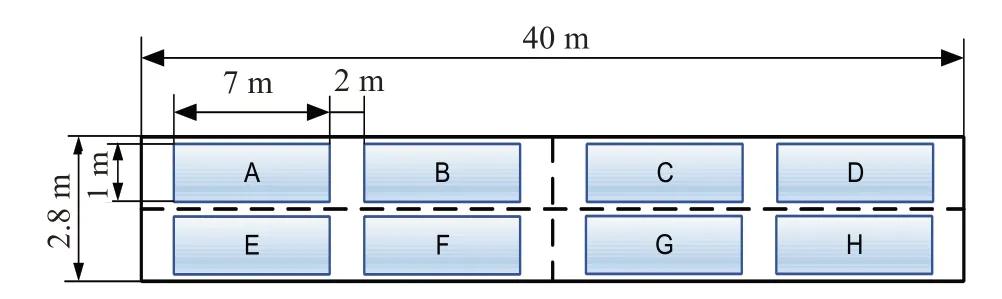
图7 土槽试验区划分Fig.7 Division of soil bin testing plots
1.5 样机类型及试验方案
为了验证仿生注液沃土装置的减黏膜脱附效果,依次在深松铲后安装8种类型的样机,如表2所示。
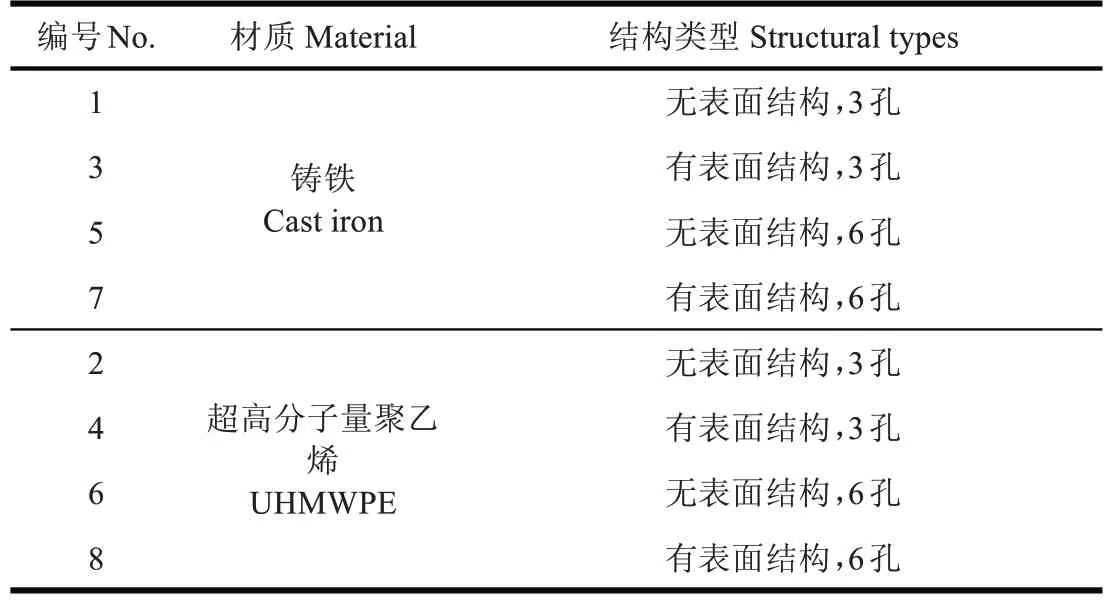
表2 注液沃土装置类型Table 2 Type of sub-soil liquid fertilizer
根据玉米种植农艺条件(株距30 cm,行距65 cm),在田间1 m 长的玉米垄内可种植4 株玉米。以单株玉米生长期至少施加50~100 g 肥液,注液沃土装置运行速度1 m/s 计算,田间1 m 长的玉米垄内需要施加200~400 g肥液。因此以质量流量200 g/s 作为入口的边界条件,在土槽试验台车牵引速度1.0 m/s、样机入土深度15 cm、注液量200 g/s 的工作条件下,进行装置工作阻力和土壤粘附量的测试。
以有无表面结构、孔数、材料和是否注液作为装置性能的试验因素,以工作阻力和土壤粘附量作为考核指标,每个因素取2 个水平,选用正交试验表L(824),正交试验因素和水平如表3所示。每组试验重复3次,分别记录测试结果。采用极差分析和方差分析方法,选择出最优的样机类型,并通过分析测试结果极差值的大小确定出各因素的主次和最优水平,找到各因素的最优水平组合。
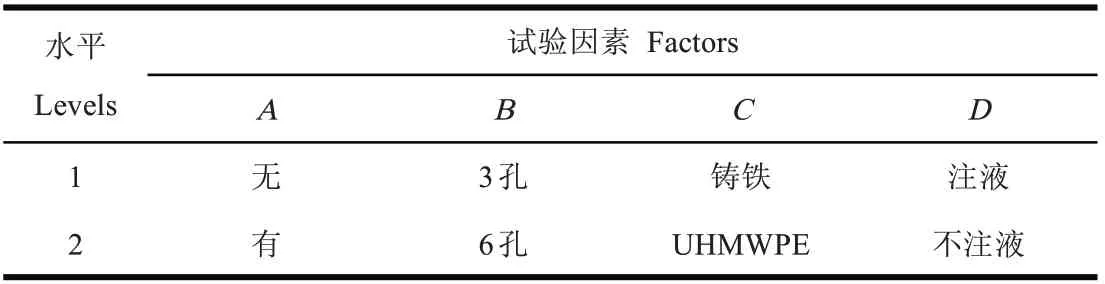
表3 正交试验因素水平表Table 3 Factor level table of orthogonal test
2 结果与分析
2.1 正交表分析
正交试验方案和极差分析结果如表4 所示。由极差分析结果可知,影响工作阻力的试验因素为:注液(D)>孔数(B)>材料(C)>表面结构(A),各因素的优水平分别为注液(D1)、6 孔(B2)、UHMWPE(C2)和有表 面 结构(A2),即获得最小工作阻力的最优组合为:D1B2C2A2。影响土壤粘附量的试验因素为:表面结构(A)>孔数(B)>材料(C)>注液(D),各因素的优水平分别为有表面结构(A2)、6 孔(B2)、UHMWPE(C2)、注液(D1),即获得最小土壤粘附量的最优组合为A2B2C2D1。
2.2 方差分析
方差分析结果(显著性水平P<0.05)如表5 所示。由表4 和表5 可知,有无表面结构对注液沃土装置工作阻力的影响显著,对土壤粘附量的影响极显著,表明具有表面结构的样机可降低工作阻力及土壤粘附量。孔数对工作阻力的影响显著,工作阻力随着孔数的增加而减小;孔数对土壤粘附量的影响极显著,6 孔注液型可显著减小土壤粘附量。材料对工作阻力及土壤粘附量的影响均显著,采用UHMWP时,工作阻力和土壤粘附量均达到最小值。有无注液对工作阻力和土壤粘附量的影响均极显著,在注液的情况下,工作阻力和土壤粘附量均有效降低。
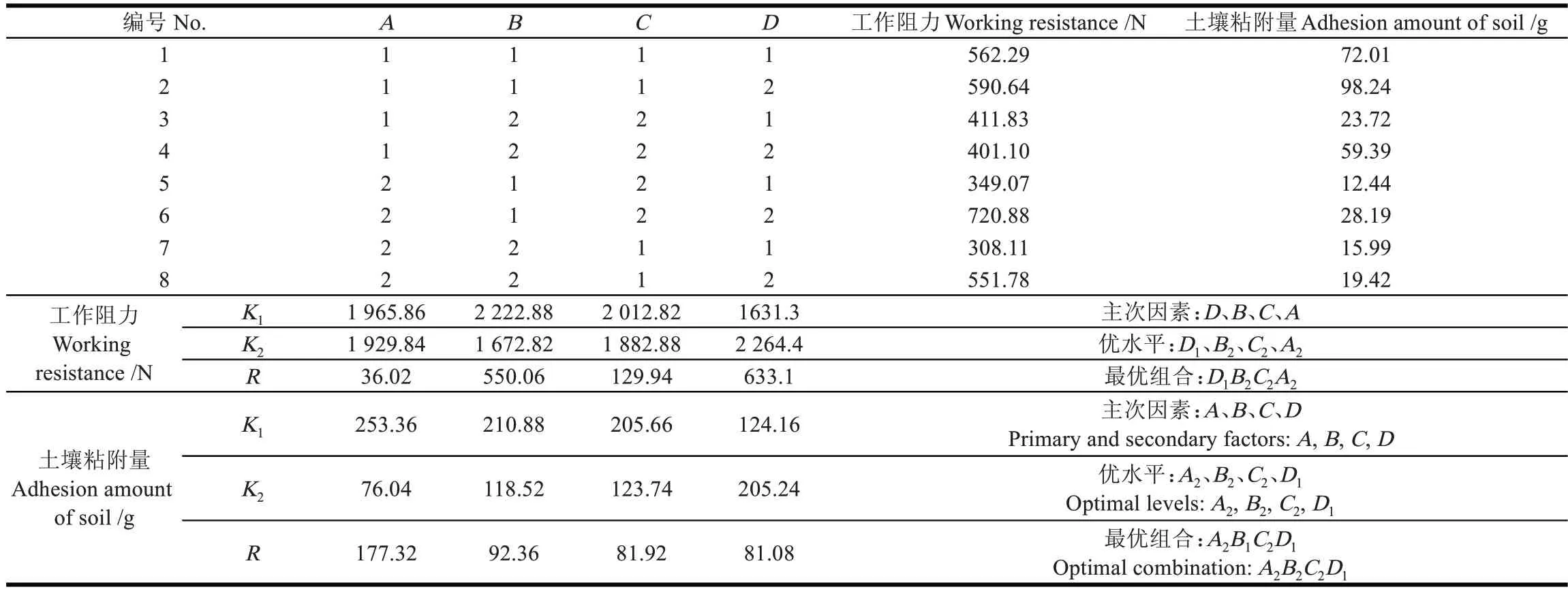
表4 正交试验设计表及极差分析Table 4 Orthogonal test design table and range analysis
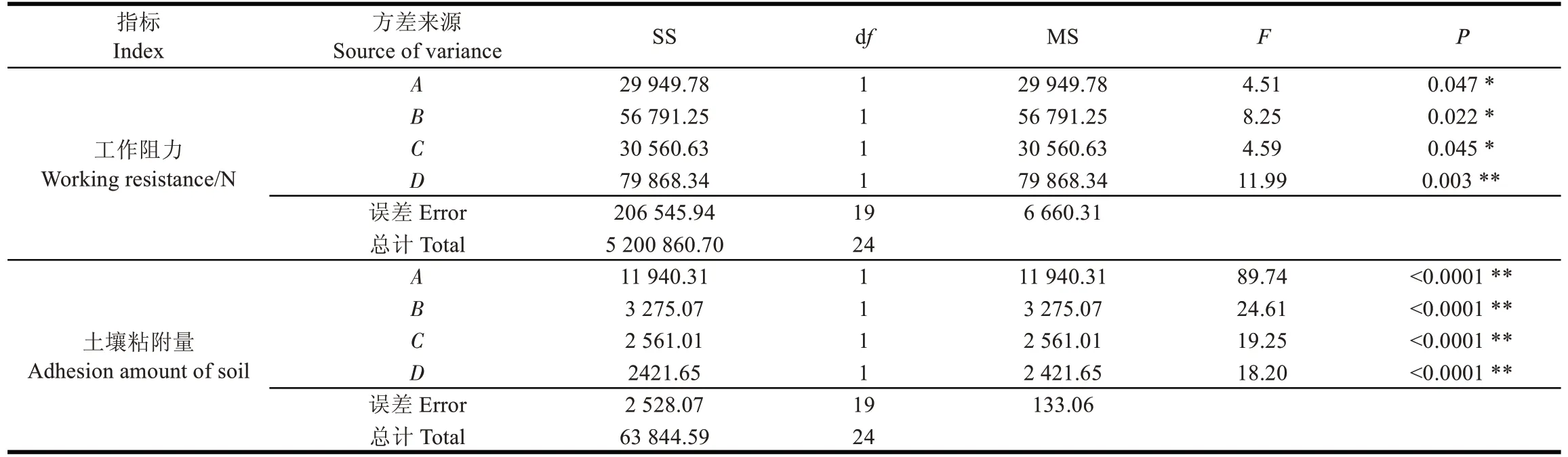
表5 试验结果方差分析Table 5 Analysis of variance of test results
通过对比分析,以工作阻力为指标得到的最优组合为D1B2C2A2,其中注液(D)对工作阻力的影响最显著。以土壤粘附量为指标得到的最优组合为A2B2C2D1,4个因素与土壤粘附量呈极显著相关,由F值可知,最显著的因素为表面结构(A)。通过综合分析,得到最优组合为A2B2C2D1;优选的样机类型为:含有6 个注液孔、UHMWPE 材质且具有几何结构表面的仿生注液沃土装置(8号样机)。
为确认样机类型分析结果的有效性,在土槽试验台车牵引速度1.0 m/s、样机入土深度15 cm、注液量200 g/s的工作条件下,对优选的样机进行土槽验证试验并重复3次,试验结果如图8所示。
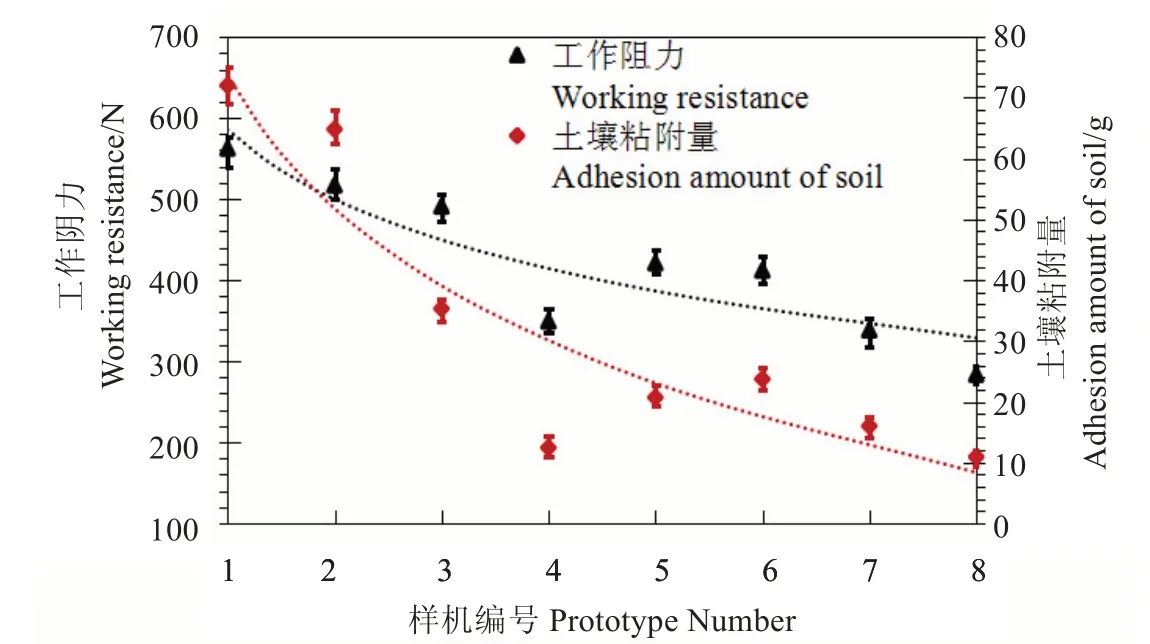
图8 土槽试验结果Fig.8 Soil bin test results
测试结果表明,工作阻力、土壤粘附量与样机的材质和结构类型密切相关,工作阻力和土壤粘附量随着选用UHMWPE 材质、增加孔数、构建表面结构呈逐步降低趋势。其中,注液沃土装置8 号样机的工作阻力平均值为283.48 N,土壤粘附量平均值为10.93 g,显著低于其他样机测试结果,与样机类型分析结果一致。
3 结论
本研究通过学习蚯蚓粘液的分泌过程,采用仿生设计方法设计了注液沃土装置。采用土槽台车试验系统进行了仿生注液沃土装置样机选型和工作参数试验。以土壤粘附量、工作阻力为试验指标,考察了装置的表面结构、注液孔数量、材质和注液方式4 个性能参数对目标值的影响,从8 类样机遴选出土壤粘附量和工作阻力较小的样机类型,得到如下结论:
1)性能参数对样机工作阻力的影响程度为:注液>孔数>材料>表面结构,各试验因素的优水平分别为注液、6孔、UHMWPE和有表面结构。性能参数对土壤粘附量的影响程度为:表面结构>孔数>材料>注液,各因素的优水平分别为有表面结构、6孔、UHMWPE和注液;
2)有无表面结构对注液沃土装置工作阻力的影响显著,对土壤粘附量的影响极显著。具有表面结构的样机可降低工作阻力,减小土壤粘附量。孔数对工作阻力的影响显著,工作阻力随着孔数的增加而减小;孔数对土壤粘附量的影响极显著,6 孔注液型可显著减小土壤粘附量。材料对工作阻力及土壤粘附量的影响均显著,采用UHMWP 时,工作阻力和土壤粘附量均达到最小值。有无注液对工作阻力和土壤粘附量的影响均极显著,在注液的情况下,工作阻力和土壤粘附量均有效降低;
3)通过综合分析,从8 类样机中确定的优选类型为:具有表面几何结构的6 孔注液型UHMWPE 材质沃土装置。验证试验表明:在相同试验条件下,该样机工作阻力的平均值为283.48 N,土壤粘附量平均值为10.93 g。低于其他类型样机的测试结果,可显著减小土壤粘附量,降低工作阻力。
