基于改进粒子滤波算法的小型无人机传感器故障诊断方法
2019-11-15刘彦超刘慧文李凤银
刘彦超,刘慧文,高 薇,李凤银
(1.包头轻工职业技术学院 自动化学院, 内蒙古 包头 014030;2.内蒙古工业大学 电力学院, 呼和浩特 010051;3.云南大学 软件学院,昆明 650091; 4.曲阜师范大学 信息科学与工程学院, 山东 日照 276826)
无人驾驶航空器简称“无人机”(unmanned aerial vehicle,UAV),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,其也可由车载计算机完全或间歇地自主操作。与有人驾驶飞机相比,无人机更适合特殊环境下的高危侦测任务[1-3]。近期,随着无人机技术的不断进步,各种型号的无人机在军事和民用领域均得到了快速的发展,特别是各种小型无人机,由于其具有较高的性价比和广泛的适用性,在例如影视拍摄、农业、植保、灾难救援、勘探测绘、快递运输、环境保护等领域均具有较大的需求量和应用潜力。
现阶段的大多数无人机飞行系统均安装了众多精密的传感器,以便监测当前无人机的各种工作状态参数并反馈给核心控制器,从而保证飞行的稳定和姿态调整[4]。可以看出:传感器是无人机控制系统的重要部件,其工作状态直接影响飞行的各项性能指标。但是无人机的高空飞行环境一般较为恶劣,因此传感器发生故障的概率一直居高不下。在近5年的小型无人机事故调查统计数据中,控制系统故障和人为操作失误分别占总事故的53%和22%,其他故障占25%。其中,传感器故障是导致控制系统发生故障的最主要因素[5]。传感器一旦发生故障,将导致无人机的控制器接收到错误的反馈数据,进而发出错误的控制命令,最终造成坠机等严重后果。因此,准确、有效的无人机传感故障诊断技术能提高无人机工作的可靠性和安全性,具有十分重要的研究意义和实际应用价值。
为了提高小型无人机传感器故障诊断的精确度,提出基于改进粒子滤波算法的小型无人机故障诊断方法。改进算法把传感器故障诊断问题视为多维复合假设检验问题,并利用序贯概率比检验法分析粒子滤波估计值与传感器输出值的残差,从而诊断对应的传感器是否发生故障。一旦传感器出现故障,使用广义最大似然法则来辨识具体的故障类型。仿真结果表明:该方法能有效完成小型无人机的故障类型识别,且具有较高的诊断精度。
1 相关研究
在目前的各种类小型无人机系统中均存在大量传感器,如垂直陀螺、速率陀螺、加速度计等。这些精度的零部件对工作环境的要求一般较高,温湿度变化、速度变化等各种因素的变化都可能影响其测量精度[6]。但是,小型无人机的恶劣工作环境导致上述精度传感器的故障率较高。
为了对无人机传感器进行故障诊断,研究人员提出了各种基于人工智能技术和机器学习算法的诊断方法。文献[7]提出了一种基于小波与梯度提升决策树的无人机传感器故障诊断,采用基于多层小波包分解的特征提取方法,将小波包分解系数与频带能量熵组合构成特征向量,并采用梯度提升的策略构成强分类器,使故障分类精度得到显著提高。文献[8]对飞行器导航传感器故障诊断进行了具体研究,提出一种神经网络的导航传感器故障诊断方法,利用小波包对原始故障信号进行分解,提取信号特征向量,然后将特征向量输入神经网络训练,实现飞行器导航传感器故障智能化诊断。此外,文献[9]提出了一种基于粒子滤波和自回归谱的液压泵故障诊断方法。文献[10]提出了一种基于粒子滤波算法的传感器故障诊断,利用基于残差生成的系统故障诊断方法,将改进的重采样算法应用于传感器故障诊断中,以得到较好的诊断效果。
由上述研究结果可以看出:基于粒子滤波算法的传感器故障诊断具有较好的故障诊断性能,但是其适应的传感器类型有限,无法满足不同类型的传感器故障诊断要求。因此,本文把传感器故障诊断问题视为多维复合假设检验问题,并利用序贯概率比检验法分析粒子滤波估计值与传感器输出值的残差,从而诊断对应的传感器是否发生故障。此外,在传感器出现故障时,改进算法使用广义最大似然法则来辨识具体的故障类型,从而实现对多种类型故障的准确辨识。
2 无人机传感器及其故障类型分析
2.1 无人机传感器介绍
无人机传感器的主要职责是监测当前无人机的各种工作状态参数并反馈给核心控制器,从而保证飞行的稳定和姿态调整。主要采用的传感器包括:① 垂直陀螺,用于测量俯仰角、滚转角;② 角速率传感器,用于测量三轴角速度;③ 无线高度表,用于测量高度;④ 磁罗盘,用于测量航向角;⑤ 大气数据传感器,用于测量气压高度、高度变化率、指示空速、真空速等;⑥ GPS传感器,用于测量经度、纬度等地理坐标信息。
2.2 传感器故障分析
目前,传感器常见故障类型及故障原因如表1所示[11]。
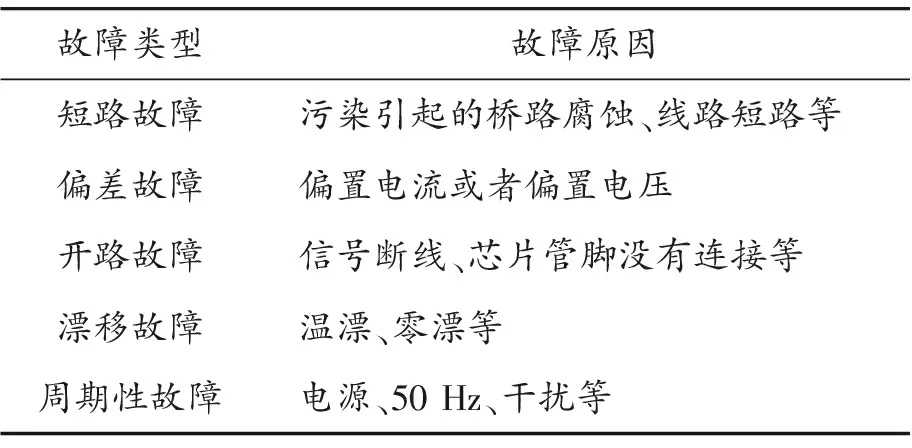
表1 传感器常见故障类型及故障原因
以短路故障为例,对故障模型进行简要分析。短路故障模型的表示方法如下:
(1)
其中:ys(t)表示传感器的测量输出值;y(t)表示被测参数实际值;ts表示发生故障的时间。则偏差故障模型表示为
(2)
其中d为恒定数值。
开路故障模型表示为
(3)
漂移故障模型表示为
(4)
其中k(t-ts)表示偏移速率。周期性故障模型表示为
(5)
其中f(t)为周期信号。根据最终的故障结果,可以将上5种类型的故障综合为3种,即恒偏差故障、恒增益故障和其他卡死故障[12-13]。本文以此作为常见故障对提出诊断方法进行功能测试。
3 基于改进粒子滤波的无人机传感器故障诊断算法
3.1 基于粒子滤波算法的故障诊断原理
如图1所示,基于粒子滤波的故障诊断技术首先需要生成残差,然后进行残差的分析和评估。残差序列的生成主要利用滤波估计值和传感器测量值之间对比产生。
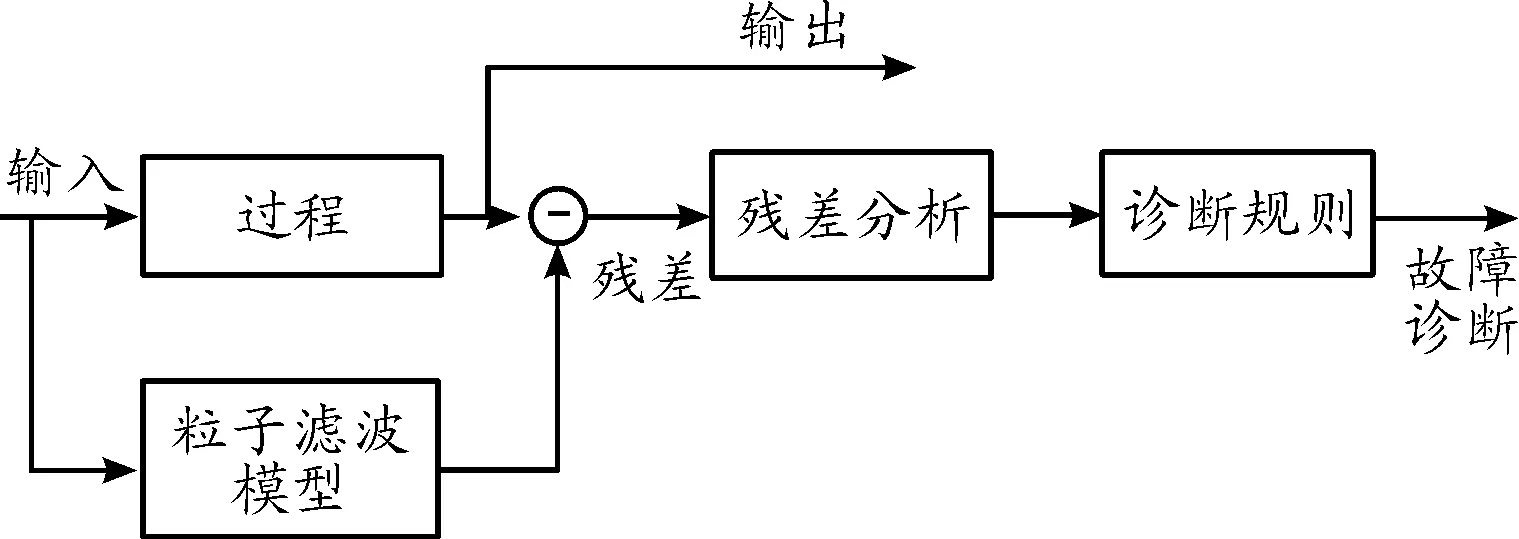
图1 基于粒子滤波算法的故障诊断流程
本文利用序贯概率比检验法分析粒子滤波估计值与传感器输出值的残差,从而及时、准确地检测出故障。此外,在传感器出现故障时,使用广义最大似然法则来辨识具体的故障类型。
3.2 改进的粒子滤波工作方法
首先,把传感器故障诊断问题视为多维复合假设检验问题,即把无人机系统的状态分成H0和H1,H0表示无人机没有故障,H1表示无人机发生故障。故障状态包含3个子形式,H11、H12、H13,分别表示恒偏差故障、恒增益故障和其他卡死故障。
H0:yt=yt(faultfree)
(6)
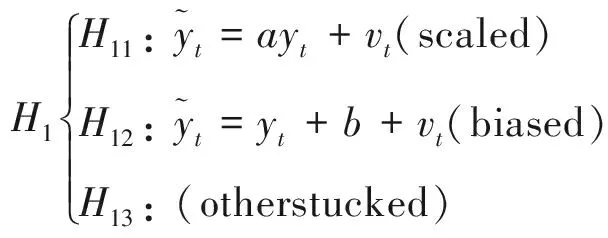
(7)
其中a、b和vt均为未知的非随机参数。基于粒子滤波的传感器故障诊断主要方法如下:
1) 当无人机中传感器没有出现故障时,利用粒子滤波算法对无人机的飞行状态参数进行估计,并在该时刻设定成跟踪形式;
2) 如果某一时刻滤波估计值与传感器输出值之间的残差大于设置的阈值,停止传感器的数据反馈,并把跟踪形式转变为检测形式,通过序贯概率比检验法对得到的残差序列实现处理,诊断该传感器是否发生故障;
3) 一旦真的发生故障,则通过广义最大似然法则来判断实际的故障类型。
此外,针对全局搜索能力不够强的问题,本文结合遗传算法对粒子滤波算法进行了改进,具体实现步骤如下:


步骤3在K时刻,更新粒子的权重值。
步骤4采用轮盘赌方法重新进行采样,并选择保存权值较大的样本。
步骤5利用如下模型作为状态转移模型对当前样本完成预测:
(8)
步骤6若达到最大迭代次数或者停止条件(误差值),则停止循序迭代,否则跳转执行步骤2。
3.3 采用序贯概率比检验法的故障诊断
为了利用序贯概率比检验法,设H0的残差均值为μ0,H1的残差均值为μ1,则似然比的计算方式为
(9)
检测阈值为:
(10)
(11)
其中:α表示故障的误报率;β表示故障的漏报率。
如果λ(n)≤A,判断无人机没有故障,即状态为H0,诊断系统从检测形式转换回跟踪形式;λ(n)≥B,那么判断无人机发生故障,即状态为H1,其他情况无变化则继续采样。当判断无人机处于故障状态后,将通过广义似然比检验对传感器发生故障的类型进行判断。H11和H12对数似然比为:
(12)
(13)


(14)

(15)
(16)
按照广义最大似然法则,采用的决策函数如下所示:
(17)
残差的表达式如下:
(18)
4 仿真验证
4.1 仿真设置
以偏航角速率传感器发生恒偏差、恒增益和其他卡死3种故障为例。设置无人机在飞行到一定高度(500 m)后,维持自动平飞模式,仿真时间为40 s,采样周期为 0.02 s。仿真参数M=30、N=100、阈值范围为220,当残差值大于220时判断出现故障。
4.2 测试结果
设置在无人机稳定飞行25 s时出现卡死故障,那么偏航角速率传感器的俯仰角信号测量拟合曲线如图2所示,其中实线为传感器实际测量值,虚线为估计值。
按照同样的飞行仿真条件,对无人机发生传感器恒偏差故障的情况进行测试分析,设置在无人机稳定飞行25 s时出现一个恒值偏差为2°的故障。该情况下偏航角速率传感器的俯仰角信号测量拟合曲线如图3所示。
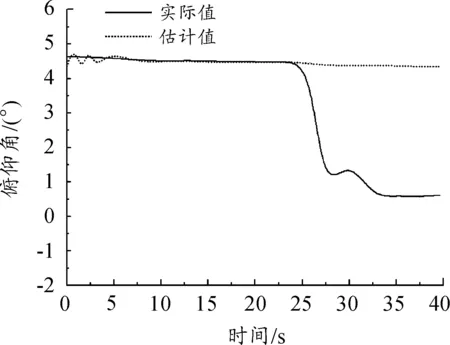
图2 卡死故障
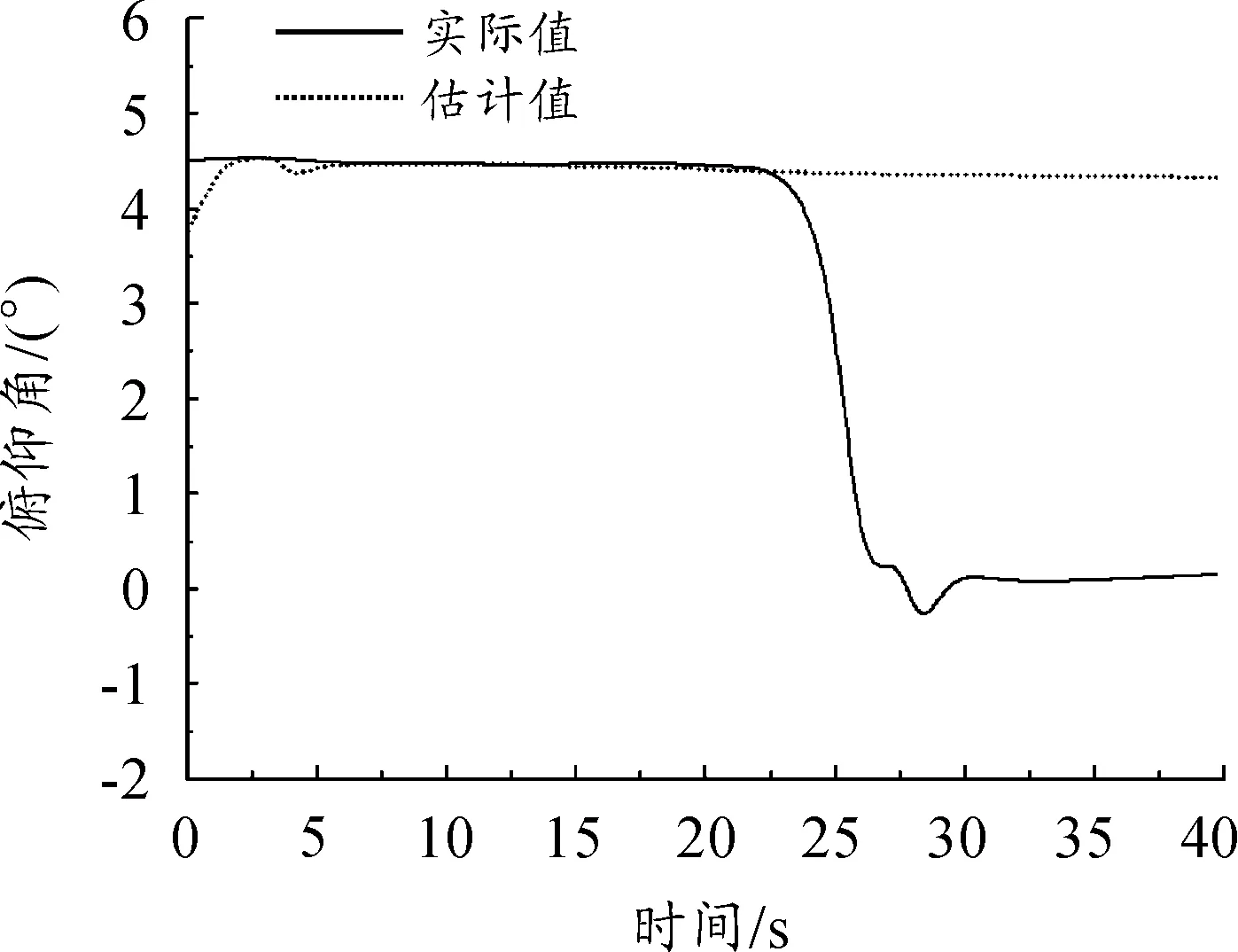
图3 恒偏差故障
按照同样的飞行仿真条件,对无人机发生传感器恒增益故障的情况进行测试分析,设置在无人机稳定飞行25 s时出现一个比例系数为3.2的恒增益故障,则该情况下偏航角速率传感器的俯仰角信号测量拟合曲线如图4所示。
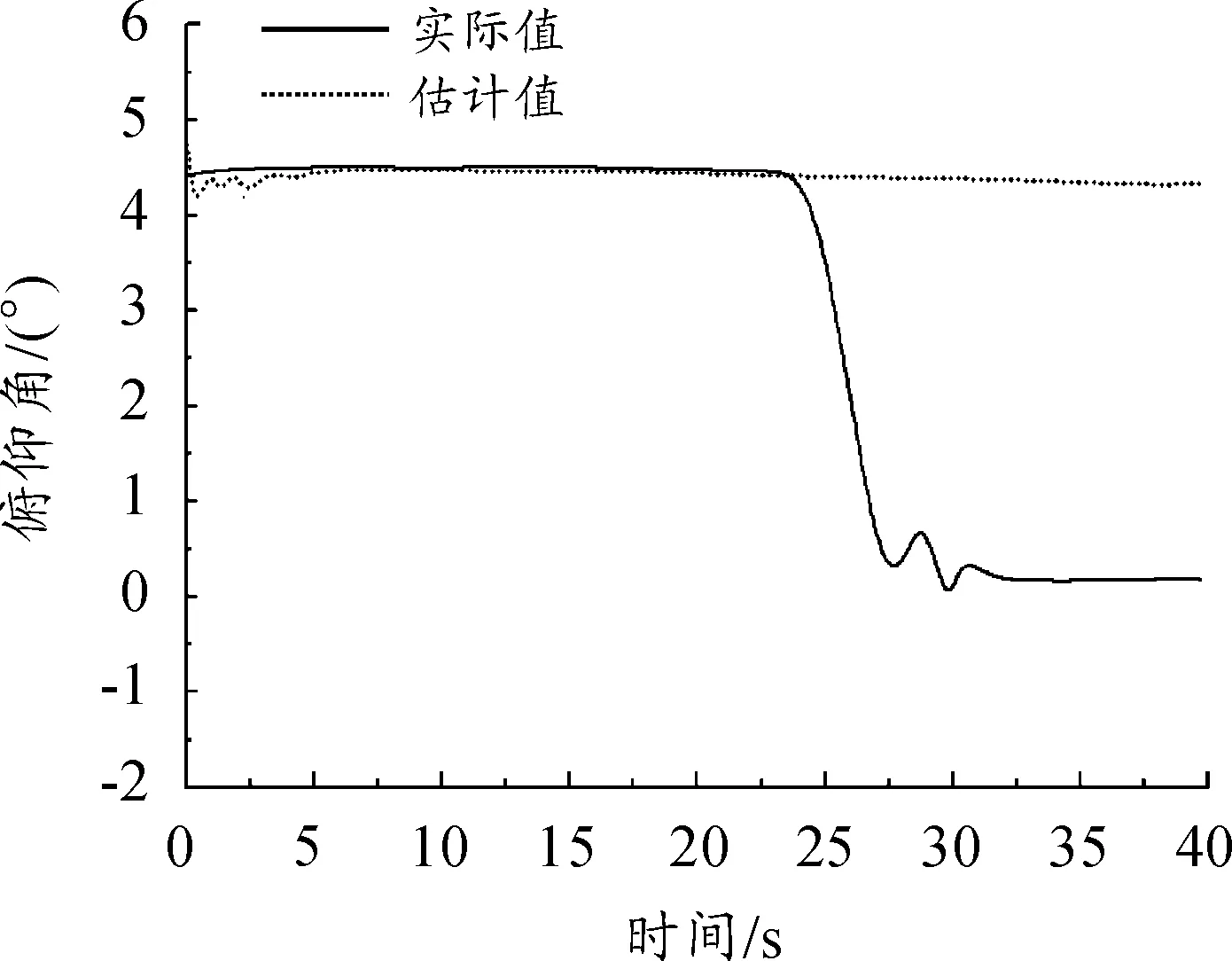
图4 恒增益故障
通过图2~4可以看出:改进粒子滤波算法能够通过差值准确判断是否发生故障。采用准确率、召回率和F1测试值作为分类方法的评价指标[13],对最终得到的故障分类结果进行计算,如表2所示。由于采用了遗传算法对粒子滤波算法进行改进,使得算法执行复杂度有所增加,这在一定程度上牺牲了时间效率。但是,从表2可以看出:提出诊断方法的各项指标均在94%以上,有效提高了诊断的准确率。
表2 故障分类性能结果 %
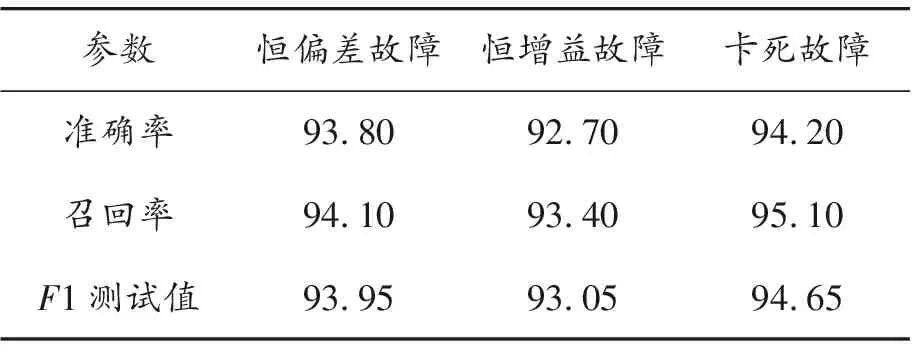
参数恒偏差故障恒增益故障卡死故障准确率93.8092.7094.20召回率94.1093.4095.10F1测试值93.9593.0594.65
5 结束语
本文提出一种基于改进粒子滤波算法的小型无人机故障诊断方法。提出的改进算法把传感器故障诊断问题视为多维复合假设检验问题,并利用序贯概率比检验法分析粒子滤波估计值与传感器输出值的残差,从而诊断对应的传感器是否发生故障。一旦传感器出现故障,使用广义最大似然法则来辨识具体的故障类型。仿真结果表明:该方法能以较高的诊断精度有效完成小型无人机的故障类型识别,对无人机应用具有一定的参考价值。
