考虑运行效益评价的车速引导与预信号协同控制研究
2019-11-15陈浩杰黄丽莹陈士安
姚 明,陈浩杰,黄丽莹,陈士安
(江苏大学 汽车与交通工程学院, 江苏 镇江 212000)
随着我国国民经济的发展,交通拥堵问题日益严重。交叉口作为道路的瓶颈,其通行能力影响着城市路网的状态。如何提升交叉口通行能力,降低交叉口延误是解决城市交通问题的关键。近年来,专家学者提出了不少提升交叉口通行能力的方法。比如,在交叉口进口道设置综合待行区。综合待行区的设计即在距离交叉口进口道原始停车线适当距离处设置预停车线,原始停车线和预停车线之间组成的空间作为综合待行区。在不考虑右转车辆的情况下,综合待行区的设置可以做到待行区内左转相位和直行相位滚动切换,将交叉口闲置的空余车道资源充分利用,从而显著提高交叉口的通行能力。近年来,国内外学者对综合待行区的研究主要集中在综合待行区的设置方法、主预信号的协调优化、左转和直行车辆信号时长的分配等方面。例如,郭萧风等[1]对基于综合待行区的交叉口改善方法原理和特征进行研究,并分析了综合待行区设置后的交叉口通行能力以及计算方法。江金胜等[2]采用元胞自动机模型研究综合待行区的信号交叉口系统,分析综合待行区的长度设置以及信号配时对交叉口通行能力的影响。孙吉瑞等[3]对综合待行区通行能力对交叉口的延误进行了分析,但局限于单交叉口综合待行区的设置。
从以上学者的研究来看,现阶段对于交叉口综合待行区的研究主要集中在综合待行区通行能力、信号设置、综合待行区延误的影响因素等方面。然而,在设置综合待行区时忽视了重要一点:综合待行区的设置将车辆的初次停车从主停车线后移至预停车线,人为造成潜在的二次停车现象。虽然综合待行区的设置充分利用了一个相位内的空间资源,提高了通行能力,但是停车线的后移并没有降低交叉口因为增加了预信号灯和预停车线产生的排队次数和信号延误,甚至车辆在通过预停车线后,在主停车线可能还需要停车等候放行,相较于传统交叉口,增加了车辆从预停车线进入交叉口的距离。为了解决预停车线的设置造成的这一问题,本文对综合待行区的设置进行了改进,旨在减少车辆在综合待行区的停车次数,提出了车速引导与综合待行区预信号协同控制的方法。不考虑右转车辆和非机动车,对即将进入待行区的左转、直行车辆分别进行车速引导,减少车辆在预停车线的停车次数,降低综合待行区预停车线和预信号设置产生的延误,提高设置综合待行区交叉口的通行能力。
1 综合待行区以及车速引导指示牌的设置
图1是综合待行区及车速控制区入口道示意图。交叉口进口道原始停车线位置不变,为主停车线,距离主停车线位置L1处设置预停车线和预信号灯。主停车线和预停车线之间的空间布局为综合待行区,直行方向的车和左转方向的车在对应的预信号灯响应后进入综合待行区待行。即综合待行区兼具左转待行区与直行待行区功能。其中,综合待行区车道为可变向车道,非综合待行区车道为不可变向车道。在距离预信号灯L2处设置电子指示牌,分别给不可变道的直行车辆和左转车辆滚动提供引导车速。车辆在L2区域内行驶时,按照车速引导指示牌的推荐车速匀速行驶,使车辆在通过预停车线时避开红灯相位,减少车辆在预停车线的停车次数。L3为该模型的车速调整区。
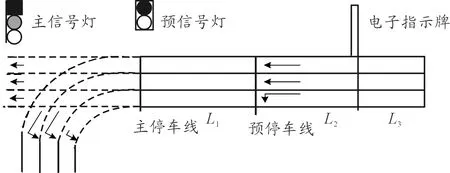
图1 综合待行区及车速控制区入口道示意图
2 相位设置以及信号配时
2.1 综合待行区主信号灯与预信号灯的相位设置
图2(a)为传统综合待行区主预信号相位设置示意图,传统主信号灯相位设置一般为第1相位南北直行、第2相位南北左转、第3相位东西直行、第4相位东西左转。综合待行区预信号相位只有直行和左转两个相位[4]。为了保证综合待行区的预信号和主信号相位协调控制,一般会使预信号相位设置相对于对应的主信号相位稍作提前,这样车辆在绿灯相位通过预停车线后,刚好赶上对应的主信号灯绿灯相位。但是传统4相位设置中,主信号灯南北直行的下一相位就是南北左转。在设置预信号时,预信号的东西向直行绿灯时间设置可以跨越3个主信号相位,预信号东西向直行绿灯获得更多时间,而左转的绿灯时间相应被压缩。由于综合待行区的时空资源有限,按照传统的4相位信号灯设置方法,会造成预信号直行绿灯时间冗长,左转时间不足,且直行相位的车辆在进入综合待行区后在主停车线二次停车可能性较大等问题[5]。因此,需要对传统4相位设置方法进行改进,采取交叉口一个方向上直行和左转相间隔的方法。调整如下:主信号的4个相位分别设置为第1相位南北直行,第2相位东西直行,第3相位南北左转,第4相位为东西左转。由于主信号东西方向直行及左转相位之间有南北方向直行左转做间隔,因此预信号东西方向直行以及左转均能跨越2个相位时间,分配较传统相位均匀。图2(b)为调整后的主预信号相位设置。
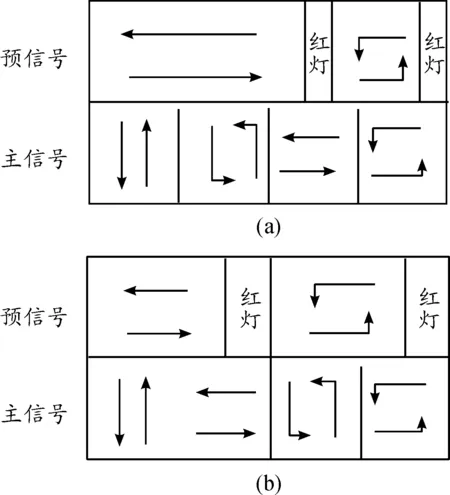
图2 传统信号相位设置和优化后的信号相位设置示意图
2.2 综合待行区主信号与预信号配时设置
主信号灯的相位配时采用传统收集到交叉口各进口道交通量的数据。预信号灯与对应的主信号灯周期时长一致。预信号相位应比对应的主信号相位有一定的提前。该提前时间设置为r1。r1同时也作为综合待行区的清空时间,保证下一相位的车辆进入综合待行区时,上一相位车辆已经清空,不会造成综合待行区既有直行车辆、又有左转车辆的乱象,保证了综合待行区的单一性。r1的计算公式为
(1)
其中:L1为待行区的长度;V0为预信号灯相位由绿灯变为红灯时最后一辆车进入综合待行区的平均车速。图3为主预信号配时示意图。
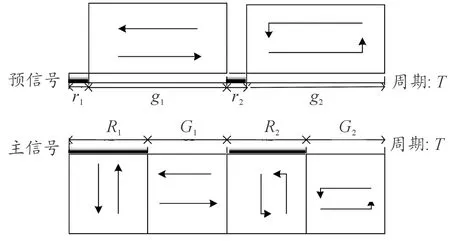
图3 进口道主信号灯与预信号灯信号配时示意图
3 车速引导与预信号相位协同控制分析
在距离预停车线L2处设置车速引导指示牌。车速引导指示牌内置中心控制单元,用于实时接收预信号灯信息,并进行处理计算。在不同的时刻,分别给直行和左转车辆提供引导车速,使车辆在L3速度调整区域内调整好车速,以匀速状态通过预停车线进入综合待行区,减少车辆在预停车线的停车次数。
3.1 车速引导模型假设
针对车速引导的研究建立在以下假设基础上:
1) 在车速调整区和车速控制区内车辆不会超车或者变换车道。
2) 汽车驾驶员在看到车速引导指示牌的推荐车速后,均能按照推荐车速行驶。
3) 各速度调整区域内车道中车辆的到达服从泊松分布。
4) 不考虑行人、非机动车以及右转车辆,只针对左转和直行车辆进行车速引导。
5) 不考虑相邻交叉口的影响。
3.2 速度引导策略
图4、5分别为直行车辆和左转车辆的车速引导示意图。横轴表示时间,纵轴表示距离。距离横轴车速引导指示牌L2处表示预信号相位。假设该路段最大限速为Vmax,最小限速为Vmin。需要直行、左转的车辆在某时刻以初始速度Vi行驶,由图(4)可知在时刻[A,B]、[C,G]这两个区间范围内,需要对初始速度为Vi的车辆进行速度引导。需要加速引导的时间区间为[C,D],减速引导的时间区间为[A,B]、[D,G]。
3.3 加速引导策略
图4为针对直行车辆的车速引导示意图。当社会车辆在时刻[C,D]以初始速度Vi从车速引导指示牌驶向预停车线时,车辆到达预停车线的时刻恰巧预信号位于r2相位。要避开红灯相位,使社会车辆在直行绿灯相位抵达预停车线,需要给车辆提供合适的加速度a,使社会车辆在r2相位之前的一个直行绿灯相位g1处抵达预停车线,进入综合待行区[6]。加速控制模型的目标函数应为车辆加速到达停车线的时刻在直行绿灯相位内,其表达式为
(2)
其中加速控制模型的约束条件为:
Tr1≤Ti≤Tg1
(3)
Vi≤Vmax
(4)
(5)
式中:S为前后车安全间距;Δt为反应、机械延误等损失时间之和;Li-1为第i-1辆车的长度;Vmax为路段最大限定车速;Tr1为r1相位最后时刻;Tg1为g1相位最后时刻;Vi为车辆初始速度。
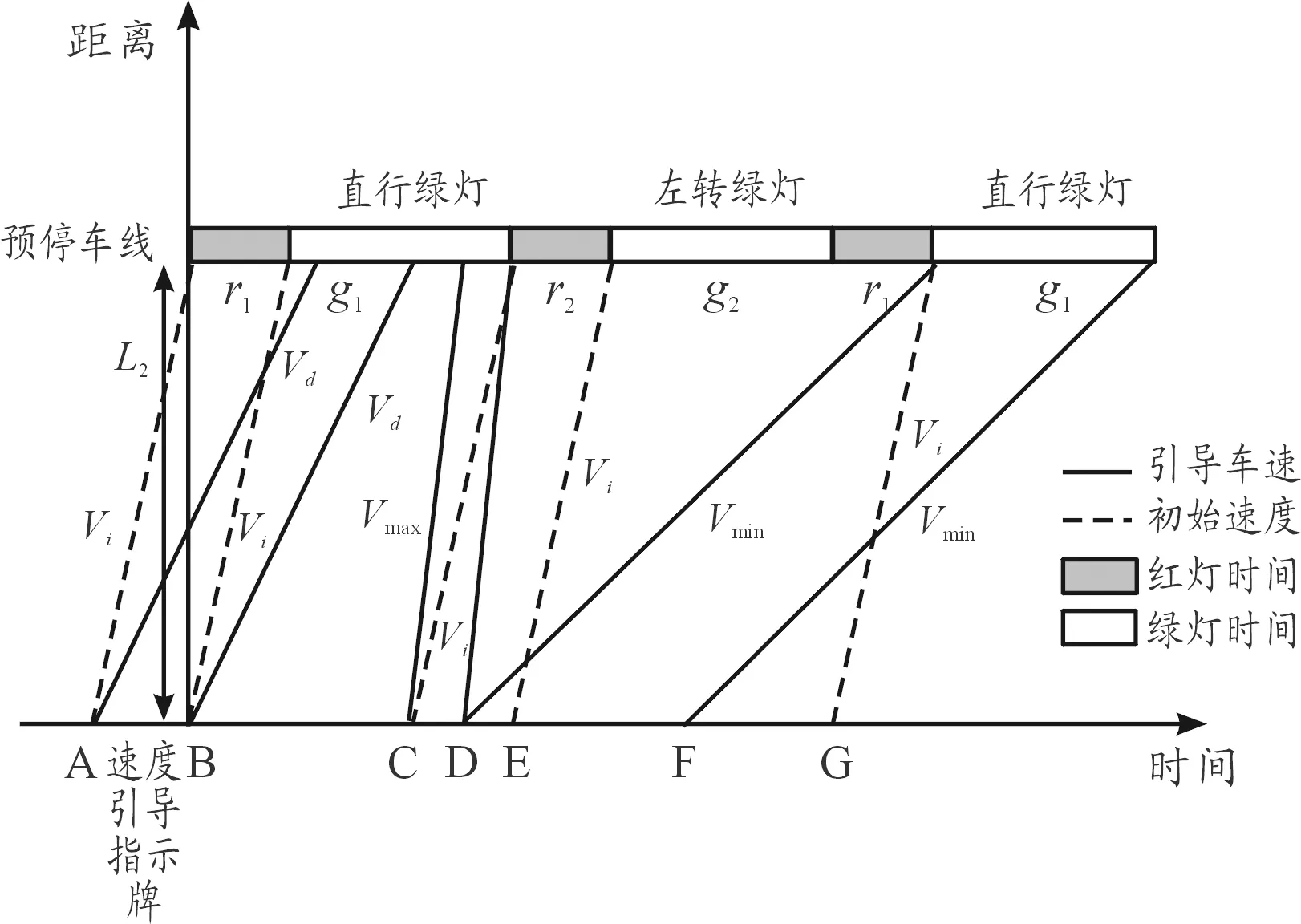
图4 针对直行车辆的车速引导示意图
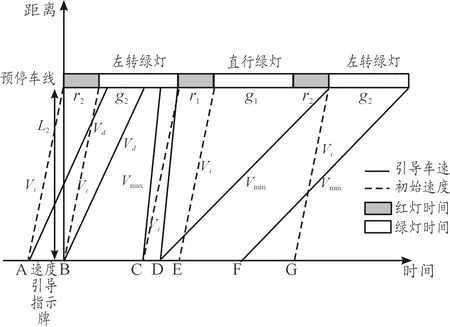
图5 针对左转车辆的车速引导示意图
3.4 减速引导策略
当社会车辆在时刻[A,B]、[D,G]以初始速度Vi从车速引导指示牌驶向预停车线时,车辆到达预停车线的时刻分别处于r1、r2、g2、r1相位。因为相位原因,直行车辆无法直接通过预停车线,不得不停车等候。要使社会车辆通过预停车线,需要给这些车辆提供合适的减速度d,使社会车辆能够在g1相位抵达预停车线,实现不停车进入综合待行区。减速控制模型的目标函数应为车辆以低于初始速度Vi的引导车速到达预停车线时的车速最大[7]。则减速模型的目标函数表达式为

(6)
其中减速控制模型的约束条件为:
Vmin≤Vd≤Vi
(7)
T∈Tg1
(8)
(9)
式中:S为前后车安全间距;Δt为反应、机械延误等损失时间之和;Li-1为第i-1辆车的长度;Vmax为路段最大限定车速;Tr1为r1相位最后时刻;Tg1为直行绿灯相位时间窗;Vi为车辆初始速度;d为减速度。
同理,左转车辆的速度引导策略和直行车辆相同。以下是控制模型的求解步骤:
步骤1当社会车辆进入速度控制区域L3时,车辆在L3、L2速度调整区和速度控制区不能变换车道。车速引导指示牌分别检测到直行和左转车辆的初始速度、运动状态。
步骤2速度引导指示牌内置的中央控制设备检测到预信号各相位并判断车辆以当前速度行驶能否通过预停车线。若直行或者左转车道上车辆不能通过,则进行速度引导。
步骤3判断车辆即将到达预停车线的时刻以及速度,结合预信号相位对直行或左转车辆分别进行加速控制或减速控制。
步骤4根据约束条件,确定第i辆车通过预停车线的时刻。
步骤5确定直行或者左转车辆加速或者减速到达预停车线的速度。
步骤6重复上述步骤。
4 交叉口通行能力及延误分析
4.1 通行能力
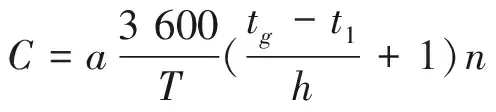
传统综合待行区进口道的通行能力计算方法为
(10)
由于车辆从预停车线到综合待行区这一段速度控制区采用的车速引导策略,综合待行区进口道通行能力实际上从预停车线延伸到车速引导指示牌。式(11)为改进后的综合待行区通行能力计算方法:

(11)
式(10)(11)中:a为折减系数,取0.95;T为信号灯周期;tg为信号灯每周期绿灯时间;t1为第1辆车通过停车线时间,实测取4 s;h为车头时距,取2 s;L2为车速控制区域长度;l为标准小车前一辆与后一辆车头之间的平均距离;n为综合待行区车道数。
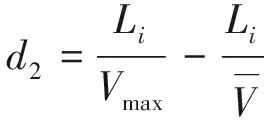
4.2 延误分析
由于对车辆从车速引导区到预信号进行了车速引导,改进后交叉口考虑的延误主要由以下几部分组成[8]:① 对车辆车速引导引起的控制延误;② 排队延误;③ 红灯信号造成的信号延误。
在减速引导策略下,速度变化引起的控制延误为
(12)
加速引导策略下的控制延误为
(13)
信号控制延误为
(14)
排队延误为
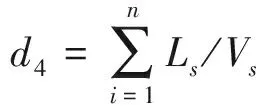
(15)

5 仿真分析
5.1 禹山路—谷阳路信号周期及交叉口模型
以镇江市禹山路—谷阳路为例。镇江市禹山路—谷阳路共有4个进口道,重点选择禹山路东西方向2个进口道为研究对象。在距离东西向禹山路原进口道45 m处设置综合待行区。预信号灯相位由绿灯变为红灯时最后1辆车进入综合待行区的平均速度V0取15 m/s,则预信号相较于主信号的提前时间取r1=L1/V0=3 s。这3 s为清空时间。图6、7为通过计算得出的主预信号配时。图8为改进后的谷阳路-禹山路交叉口底图。
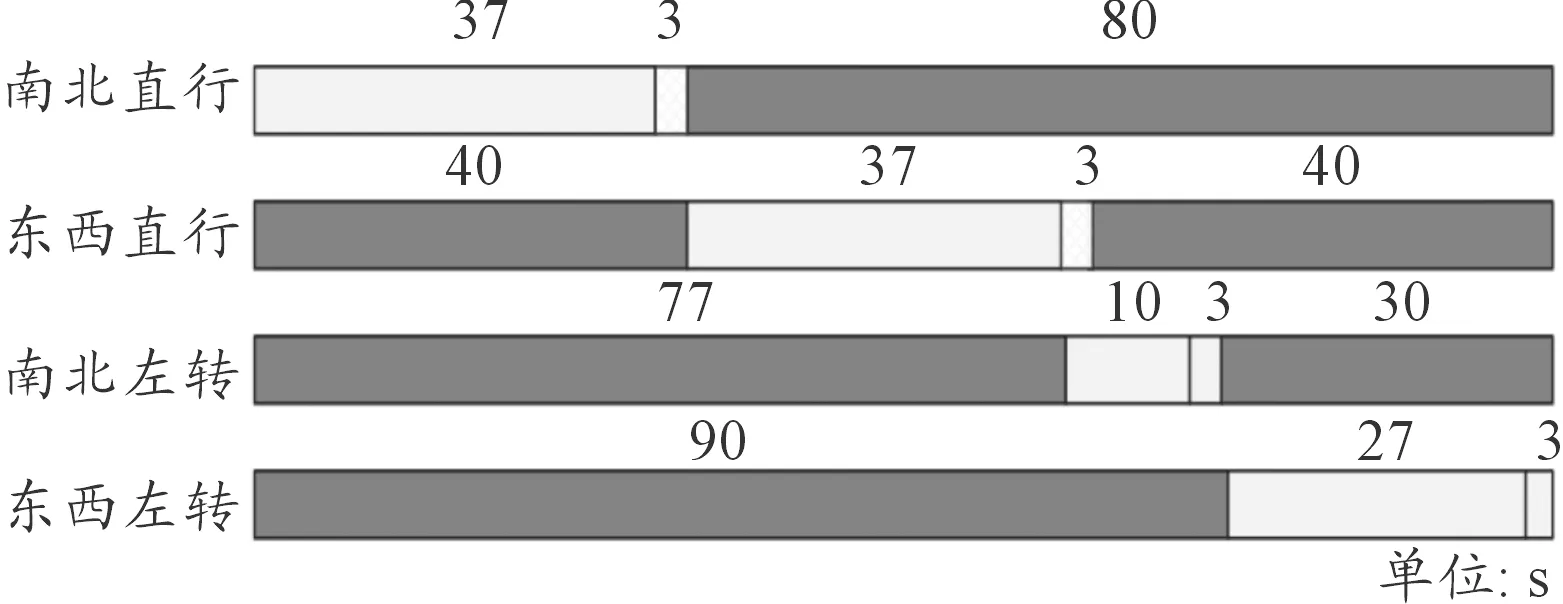
图6 主信号灯信号配时
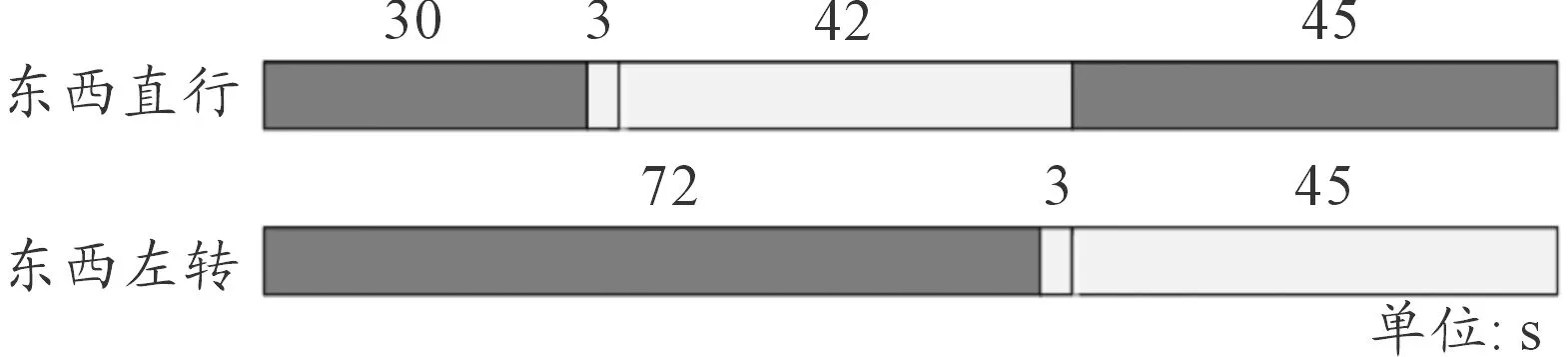
图7 预信号灯信号配时
5.2 仿真验证
利用滚动时间窗优化方法,依据车辆所在位置和速度引导车辆到达预停车线时刻,计算延误与停车次数等参数。
为实现车速引导,以VISSIM4.30为平台,利用Matlab对接VISSIM的COM接口对其二次开发[9]。仿真开始前设置信号配时参数,信号配时数据采用图7所示数据。为实现车速引导,主要步骤如下:
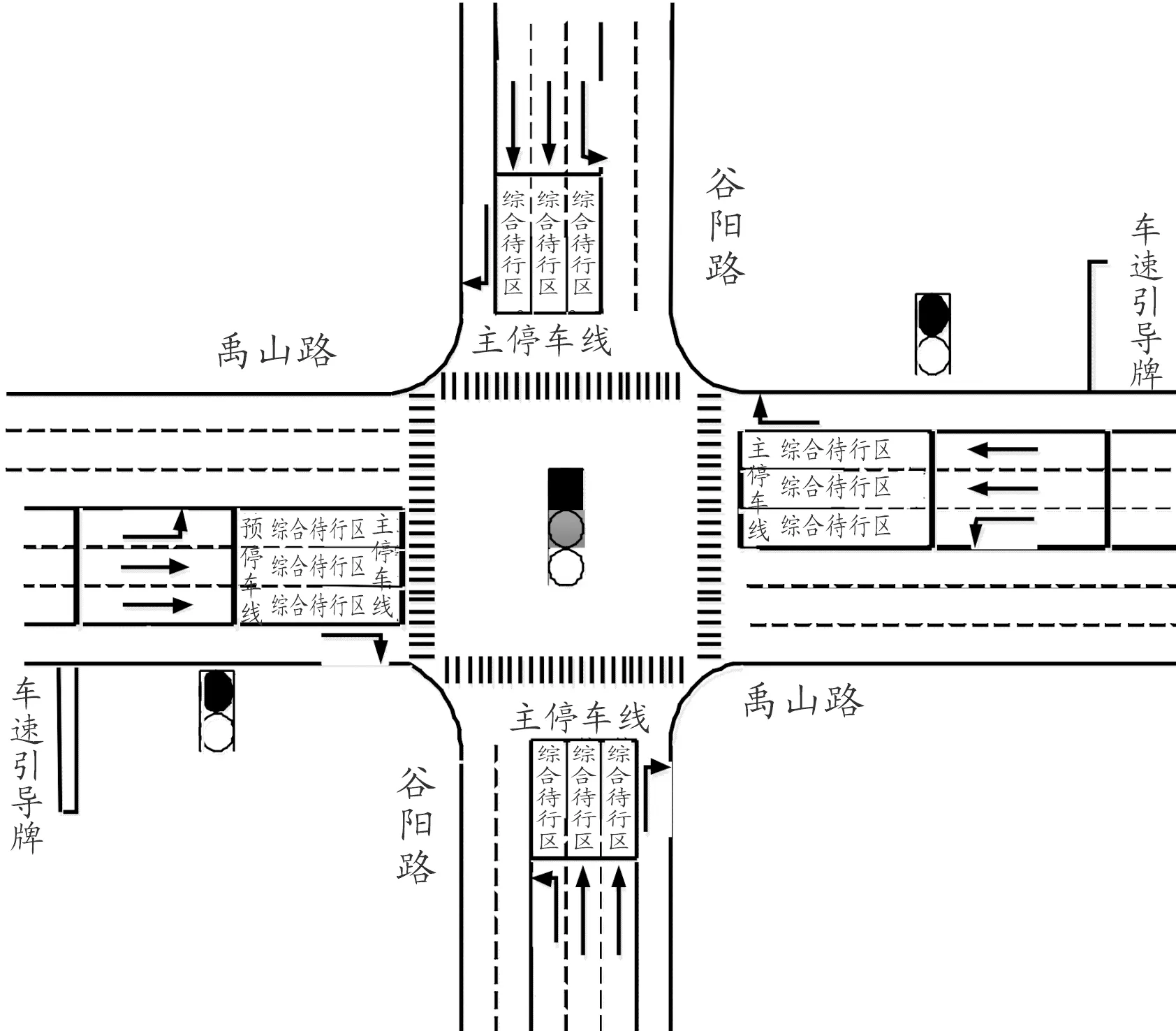
图8 改进后的禹山路-谷阳路交叉口综合待行区示意图
步骤1建立仿真路网、设置参数。优化相关参数。交叉口模型建立后,输入交通流量,设置控制参数Cycle Time、Offset、Amber、REDEND/GREENEND。
步骤2仿真运行。连接VISSIM软件COM接口,使用Matlab程序,运行仿真。
步骤3优化求解。使用粒子群多目标优化搜索算法子程序,计算满足加速、减速引导约束的支配解,选取第1个解作为最优解。
步骤4执行方案。信号控制、车速引导的执行通过Matlab程序对接VISSIM的COM接口实现。所述车速引导方案通过Matlab程序修改VISSIM的COM接口中车辆属性实现。
选取镇江市禹山路—谷阳路交叉口进行实证分析,在设置综合待行区的基础上实现速度调整区域至预停车线的车速引导,验证综合待行区加上车速引导指示牌到预停车线的优化策略是否降低了交叉口的信号控制延误和预停车线停车次数。
东西方向禹山路信号灯周期时长为120 s,主信号灯绿灯时长为37 s,预信号灯绿灯时长为42 s。仿真方案中,车辆距离车速引导指示牌100 m处接收引导车速。
车速引导下的综合待行区交叉口延误分析通过VISSIM仿真软件进行比较。车速引导下速度控制区域设置L2+L3=200 m,路段最大限速Vmax=60 km/h,最小速度Vmin=15 km/h。取加速度a=2 m/s2,减速度d=2.5 m/s2。车道跑和流率设置为 1 600 pch/h;排队车辆平均车头时距为2 s,优化滚动步距设置为10 s。设置仿真周期为6 000 s,精度为1步/s。取1 500~6 000 s仿真输出数据进行评价。仿真系统中底图的构建应用图8的交叉口环境,交叉口信号配时采用图6~7的主预信号灯配时。
针对综合待行区有无设置车速引导时的仿真结果,优化前后交叉口高峰时段每小时平均延误、停车次数和交叉口通行能力等参数。禹山路—谷阳路各进口道优化前后平均延误情况见表1。
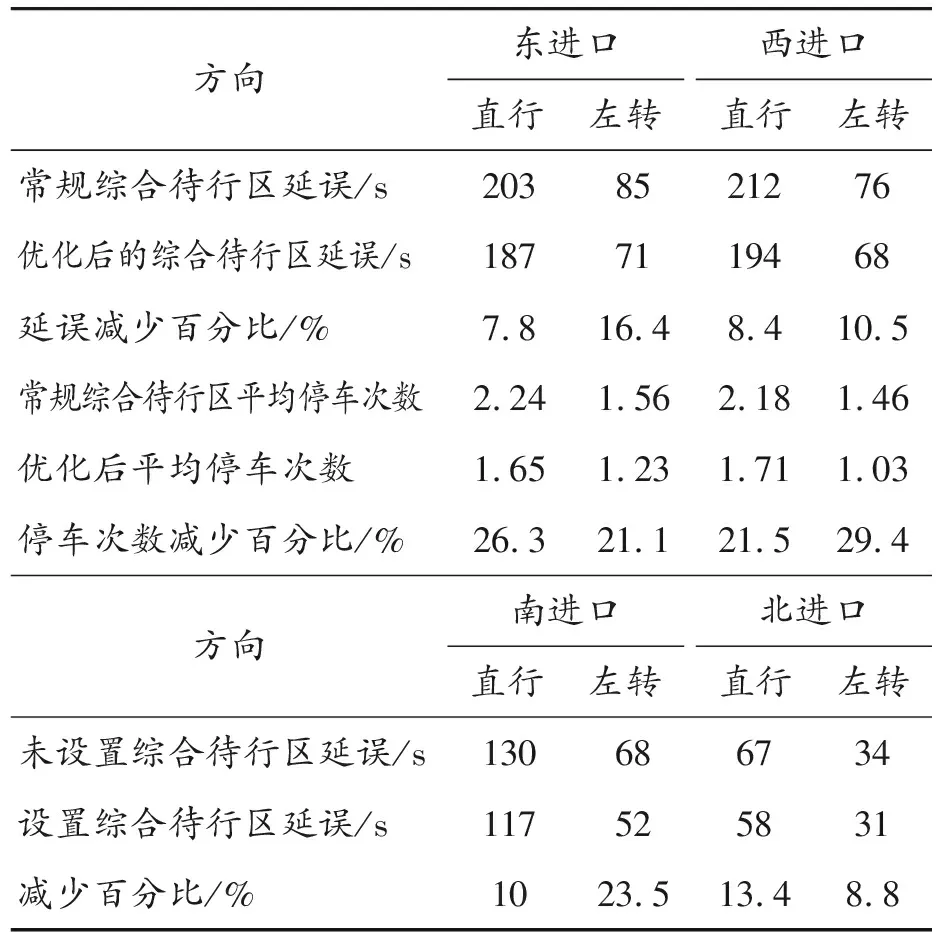
表1 禹山路-谷阳路各进口道优化前后平均延误情况
通过数据对比发现,相较于传统交叉口,设置综合待行区的进口道的平均延误[10]明显低于传统交叉口。在设置综合待行区的基础上,通过对社会车辆实施车速引导的策略可以发现,车速引导后的综合待行区设计由于改善了车辆抵达预停车线的时刻,相较于传统综合待行区减少了车辆在预停车线产生的排队次数,东西进口道方向的延误相较于没有车速引导下的延误更低,道路运行更通畅。停车次数方面,由于对车辆从车速控制区到预停车线进行了速度引导,路段停车次数明显下降,东西进口道停车次数均下降20%以上。通行能力方面,优化后的综合待行区相较于传统综合待行区通行能力分别增加了19.8%和27.8%。可见,优化后的综合待行区较原综合待行区通行能力有明显提高。
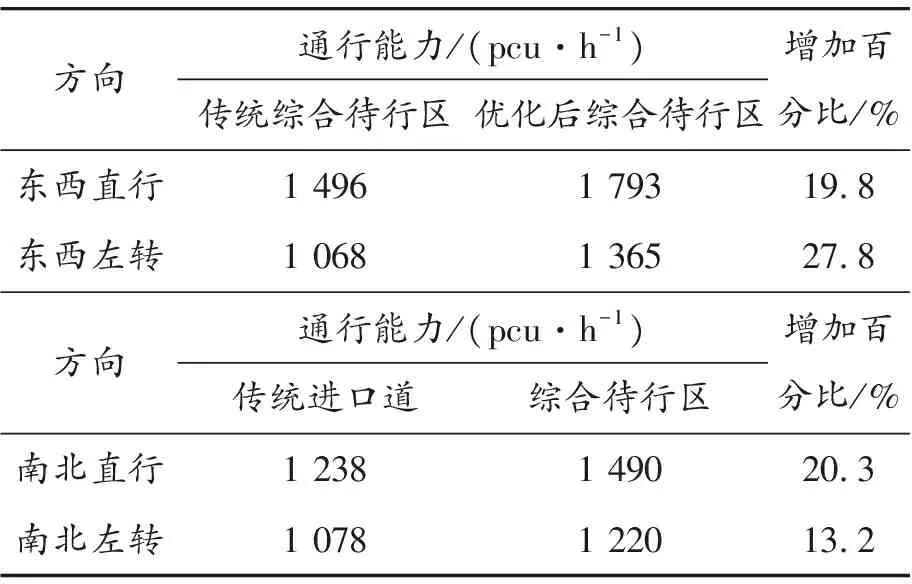
表2 禹山路-谷阳路优化前后通行能力对比
6 结束语
1) 针对传统综合待行区预信号直行相位时间冗长、左转相位时长分配不足的问题,优化了综合待行区主预信号的相位设置。使预信号直行相位和左转相位时长分配更为均匀。
2) 针对交叉口综合待行区因为预信号的设置增加的排队次数、信号控制延误问题,提出了车速引导与预信号协同控制的方法,以及针对不同时刻的车速引导加速模型和减速模型,减少了车辆在预停车线的停车次数。
3) 基于VISSIM软件,利用Matlab进行二次开发实现车速引导仿真。以镇江市禹山路—谷阳路交叉口为例,以信号控制延误、通行能力和停车次数为主要评价指标。仿真结果表明:该优化方法相较于传统综合待行区设计,明显降低了交叉口延误和停车次数,提升了交叉口的通行能力。
