碰撞力作用下半潜式海洋平台系泊缆受力情况分析
2019-11-09
(1.大连中远海运川崎船舶工程有限公司,辽宁大连 116052;2.江苏科技大学,江苏镇江 212003)
1 引 言
半潜式海洋平台具有稳性和抗沉性好,相对投资较小,适应外界复杂海洋环境能力强,平台甲板面积大,立柱等结构使得甲板可承受荷载较大;另外平台有着生产能力强,可在水深较深海域部署以及作业范围广等优点。因此在深海油气勘探和开采中使用的浮式平台中,半潜式海洋平台占有很大的比例,同时也是很多石油公司的首选。其中半潜式海洋平台主要由四大主要部件组成,分别为下浮体、立柱、甲板和上层建筑;半潜式海洋平台作业海域海况不确定因素较多,不可避免地会出现极端碰撞事故的发生,一旦发生严重碰撞后,极易对平台造成结构损坏、缆绳断裂以及重大的经济损失等后果,并且会伴随有严重的环境污染问题。在这样的背景下,本文将对碰撞力作用下的半潜式海洋平台系泊缆受力情况进行分析调查研究。半潜式海洋平台展示如图1。

图1 半潜式钻井平台
截至本课题开展期间,国内外研究者对系泊应缆受力情况的分析主要关注风、浪、流联合作用下的评估方法上,并未对碰撞力等外力作用下的情况进行深入研究。其中,对于受到风、浪、流联合作用下的海洋结构物-系泊系统进行的分析研究,现在主要有两种方案,一是刘应中,缪国平和李谊乐等的时域非耦合法;二是童波,杨建明和李欣的全时域耦合法,刘应中等对一联合海况下的船舶-系泊系统进行分析,从船舶的运动响应入手,结合系泊结构连接点的运动响应后求解得出系泊缆索的动力特性,童波等对一半潜式平台-系泊系统进行对比研究,结论是张紧式系泊系统在复杂海况下随着安装水深的加深,表现出更优异的定位能力。上述研究成果主要是考虑风、浪、流联合作用半潜式平台系泊应缆受力情况,并未考虑碰撞情况对平台系泊应缆受力情况的影响,而在碰撞情况下半潜式平台系泊应缆张力变化也将影响到其工作效率和设备安全性,因此有必要对半潜式海洋平台系泊应缆在碰撞力作用下的受力情况分析进行深入的研究。
本文以一半潜式海洋平台立柱遭受供给船船尾正向碰撞为实例进行研究,首先运用非线性有限元方法进行模型创建,根据算例条件为半潜式平台创建三维有限元模型,为供给船船尾创建集中质量模型,使用LS-DYNA软件对该碰撞进行受力计算,同时考虑除碰撞力外其他外载荷,如风、浪、流等的联合作用,在AQWA软件中对半潜式海洋平台系泊缆受力情况进行数值计算。
2 理论方法介绍
2.1 碰撞力计算方法
半潜式平台的运动微分方程:
(1)
根据本文分析的碰撞案例,将微分方程改写成:
(2)
式中:M为平台质量矩阵,an为平台加速度,C为材料阻尼矩阵,vn为平台速度,K为材料刚度矩阵,dn为平台位移。
对质量矩阵M求逆矩阵,并点乘剩余力矢量求出加速度:
(3)

若矩阵M为对角矩阵,原线性方程组将成为一系列一元一次方程,并且此系列方程关于各个自由度独立,可得出加速度ani为n:
(4)
解决大部分非线性动力学问题的常用方法是显式有限元求解法,而显式中心差分法是求解碰撞问题时的常用方法。本文在应用显式中心差分法求解碰撞力时,临界时间步长常由应力波速c比上与有限单元网格的特征长度的比值近似求得,在每一时间步范围内,离散节点的加速度通过对设定的平台碰撞速度计算得出,并对每一节点上的速度分量与位移分量上进行积分,可得出单一有限单元数据,包括应力和应变率,为单元节点应力,其中碰撞力表示为:
c*vk/2) 其中k=1,2…n
(5)
显示积分无须求解联立方程组,也不需要对矩阵进行求逆矩阵或分解计算,更不用考虑收敛性问题,并且其稳定性准则自行控制表达式计算时间步长,基于以上特点,显示积分具有计算速度快,时间积分精度高的优点。
2.2 系泊系统分析方法
系泊系统分析由两种分析方法,分别为静力分析法以及动力分析法。两种分析方法相比,静力分析方法计算结果无法精确反映结构物的运动响应,这是因为静力法无法把平台和系泊两系统的耦合作用纳入分析范围,并且该方法忽略系泊缆的弹性变形,环境荷载对两系统产生的动力效应,以及流体运动对系泊缆产生的力等因素对结果的影响。因此,生产实践中广泛使用动力分析法进行分析,其中动力分析法分为有限元法和集中质量法两种分析方法,本文对系泊系统采用有限元动力分析法。
其中有限元法充分考虑了系泊缆所受水动力,以及平台结构的应力与应变对计算结果的影响,使得分析结果更加贴近现实状况,计算中把缆绳类比为等弯曲刚度的细长型结构,再将其简化为基本模型,利用弹性梁模型进行求解计算。按照理论分析,此方法所得结果比集中质量法所得更加精确,但也使得计算过程更加复杂,其中运动方程为:
(6)
(7)

3 算例分析
3.1 数值模型与碰撞参数
本文算例选用我国深水半潜式钻井平台作为计算对象,该平台专为南海海域深海石油气开采设计建造,平台主体由四部分结构组成,分别为浮体、立柱、甲板和上层建筑。算例中坐标系原点取平台纵向对称面、横向对称面和水线面三面交点,另设X坐标正方向为艏部指向方向,Y坐标正方向垂直于左舷,Z坐标正方向指向上层建筑。本文研究对象为半潜式海洋平台以及碰撞船船尾,主要参数见表1,半潜式海洋平台和碰撞船船尾模型如图2所示。

表1 目标平台与碰撞船的主要参数/m
在撞击过程中,半潜式海洋平台受到的结构损伤以及撞击造成的结构破坏,其严重程度受到多重因素影响,如两者碰撞角度、相对速度、撞击位置等,实际撞击时,撞击参数的不确定性显著,分析中考虑各种状况的叠加将给计算带来较大困难[5]。考虑上述复杂因素,本文将仅对单个撞击参数对平台结构损坏的影响进行分析研究,场景假定为算例碰撞船船尾以2m/s的相对速度正向撞击平台立柱。
3.2 建立水动力模型
半潜式平台的设计水深为200m,算例中平台使用悬链线式系泊,每根缆索设计为两端锚固结构采用钢链,中部索体材料为聚酯绳,此设计方便施工和防止海底摩擦破坏锚固结构;参考API RP 2SM及API RP 2SK系泊系统设计规范,本文算例所采用系泊缆索具体参数如表2所示,系泊缆索水动力系数如表3所示。
系泊缆索的重要参数之一,缆索顶端导缆孔位置如表4所示,由于导缆孔位置相对于平台纵向横向对称,表格中只展示一方向上三个导缆孔的位置,另外表中导缆孔序号与图3中系泊缆索序号一一对应,表4中所使用坐标系以垂直方向上平台几何中心为原点。

表2 系泊缆索参数

表3 系泊缆索水动力系数
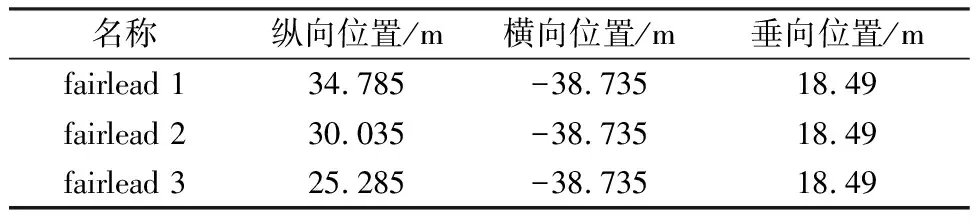
表4 导缆孔位置
平台系泊系统设计采用12根悬链线式缆索,将缆索按3×4布局对称布置,一共四组系泊缆,每组由3根缆索组成,使其缆绳夹角分别为37°/40°/45°,顶端预张力2500KN,算例中坐标系原点取平台纵向对称面、横向对称面和水线面三面交点,另设X坐标正方向为艏部指向方向,Y坐标正方向垂直于左舷,Z坐标正方向指向上层建筑,具体布置如下图3所示。
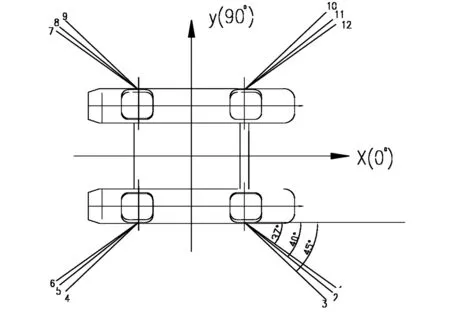
图3 系泊缆索布置图
依据API RP 2SK,在运用动力分析法研究时,缆索受最大张力时的安全系数应不小于规范中的安全系数,设计安全系数如表5所示。本算例模型在时域分析中所采用环境条件,按照设定取为不规则波,本算例所采用海洋环境条件如下:风、浪、流的运动方向均取0°,利用JONSWAP谱模拟波浪,有义波高取1.10m,谱峰周期取7.1s,谱峰升高因子取4.0,具体波谱如图3所示;在AQWA软件中建立算例模型,半潜式平台以及其系泊系统模型如图4-5所示。

表5 锚泊缆设计安全系数[63]

图4 JONSWAP波浪谱

图5 系泊系统全局图

图6 系泊系统局部图
4 碰撞力作用下系泊系统性能分析
利用非线性分析软件LS-DYNA对本算例撞击模型进行数值仿真模拟,计算导出船尾与半潜式平台的碰撞力时程曲线,为减小干扰,该曲线忽略导缆器等附件的影响,曲线如图7所示。

图7 船尾与海洋平台碰撞力时程曲线
总体来看,碰撞力曲线极具非线性特性,在船尾与半潜式平台的碰撞过程中,平台整体运动与受力情况有一定程度上的滞后性,在撞击发生瞬时和短暂一段时间之后,即撞击的初始阶段中时间t为0.8s至0.9s时,碰撞力呈急剧陡峭上升,此时出现最大碰撞力,数值为4.27E+7N,应力图见图8-9所示;由于碰撞物体巨大,撞击因惯性作用不立即停止并继续进行,平台立柱开始出现结构失效状况并发生结构破坏,该计算单元在分析中被作删除处理,使得图7曲线出现波峰;随着立柱发生结构破坏以及撞击船运动速度逐渐降低,撞击力也随之减小;撞击发生2s后半潜式平台开始出现旋转运动,碰撞力随时间推移呈抛物线式减小。
本次算例数值计算是对半潜平台和平台系泊系统在真实撞击环境下,进行的时域完全耦合状态下的动态分析。算例中平台的初始位置取动平衡位置,为得到极限数据,即最大的临界张力值,本例中半潜式平台的系泊系统受到风、浪、流同方向作用,本次计算的系泊缆张力时程曲线见图10-21所示,计算结果统计值如下表6所示。
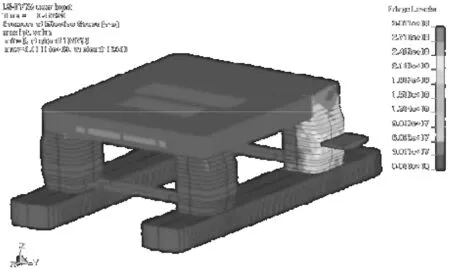
图8 0.5s的应力云图
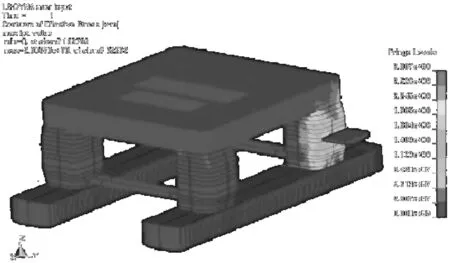
图9 1s的应力云图
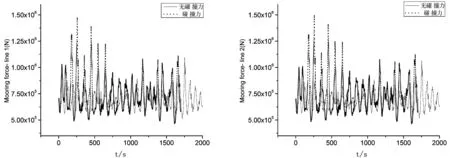
图10 1#系泊缆张力时程曲线 图11 2#系泊缆张力时程曲线

图12 3#系泊缆张力时程曲线 图13 4#系泊缆张力时程曲线
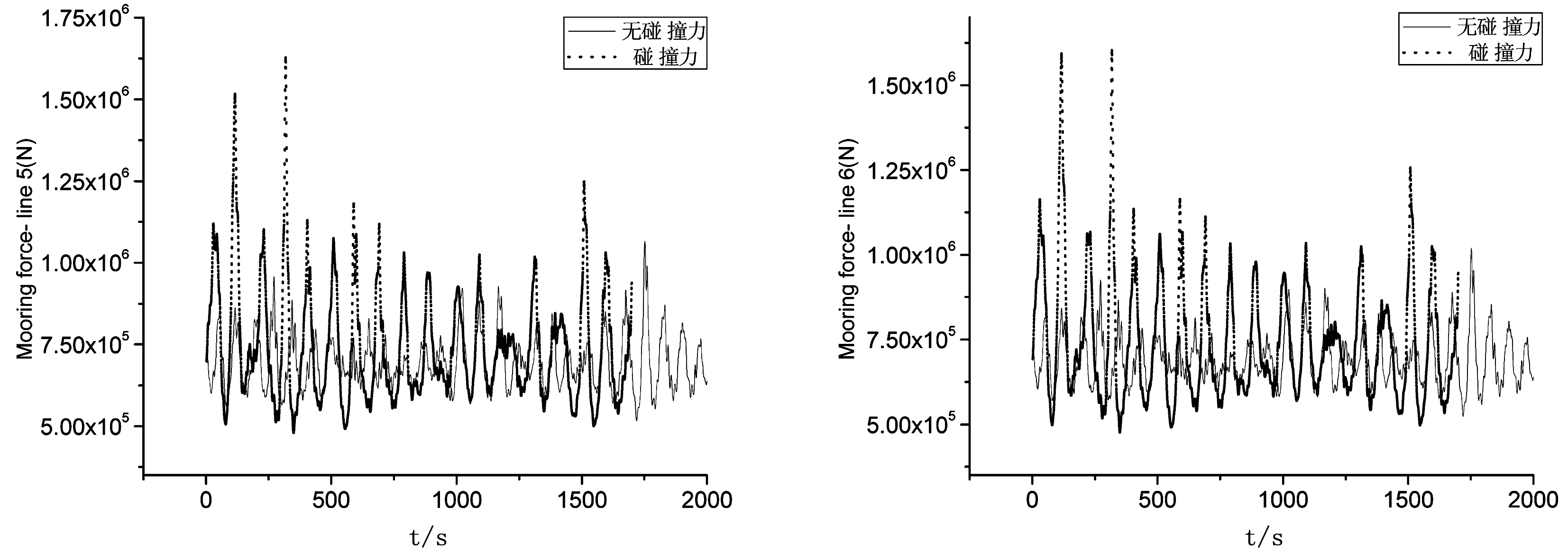
图14 5#系泊缆张力时程曲线 图15 6#系泊缆张力时程曲线

图16 7#系泊缆张力时程曲线 图17 8#系泊缆张力时程曲线

图18 9#系泊缆张力时程曲线 图19 10#系泊缆张力时程曲线
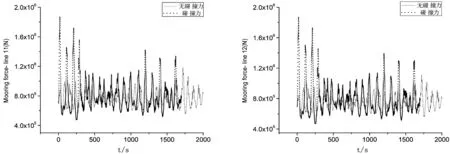
图20 11#系泊缆张力时程曲线 图21 12#系泊缆张力时程曲线

编号无碰撞力(kN)有碰撞力(kN)MeanMinMaxMeanMinMax1#701.891498.5491173.108743.213465.4161472.4822#699.562504.1431142.691742.719463.1341494.4773#695.145512.7021086.565740.200462.8341527.8034#701.856498.3171173.465744.161484.8441614.1825#699.525503.9061143.045744.312480.4241628.8756#695.106512.7831086.850743.561475.6041604.0407#783.967538.6311414.588817.739449.1942005.4818#768.277538.4451338.810804.692439.3592004.4179#750.788542.8761237.751790.630431.4041979.26510#784.022538.5641415.374826.586487.4821855.24611#768.327538.3751339.513813.477476.1861871.17712#750.827542.8071238.221799.574468.6161870.514
5 结 论
本文利用碰撞问题以及水动力问题的数值模拟技术,基于LS-DYNA非线性分析软件和AQWA流体分析软件,建立模型计算研究了船尾与半潜式平台碰撞问题和真实碰撞过程中半潜平台的系泊系统受力情况,将水动力数值计算和撞击问题中的动力分析相结合,实现了在真实海况中,受风、浪、流同方向作用下,有碰撞力作用的半潜平台的系泊系统时域耦合水动力数值模拟。得到了以下主要结论:
(1)随着碰撞过程的进行,平台不仅发生了位移变化,还伴随有旋转过程的发生。在运动的过程中,由于碰撞力的作用使得平台位移在每个方向都有增大,从而导致系泊缆总体张力都呈增大趋势。
(2)本次分析结果综合考虑仿真环境力方向和碰撞位置及作用方向的影响。例如:由于碰撞力作用在平台左舷后侧的立柱,使得系泊缆变化承7、8、9号系泊缆张力响应值最大,1、2、3号系泊缆张力响应值最小。
