交通信号灯模糊控制实时配时算法研究
2019-10-21张永志

摘 要:随着城市交叉路口的拥堵愈发严重,交通灯的智能控制便显得尤为重要。为改善城市交叉路口车辆通行效率,本文阐述了一种交通灯模糊控制实时配时算法,通过Matlab模糊工具及系统测试仿真,得到清晰化的模糊控制表,以期为交通信号灯智能控制系统的优化提供参考。
关键词:交通信号灯;模糊控制;实时配时算法
中图分类号:TP273.4;U491.54 文献标识码:A 文章编号:2096-4706(2019)21-0051-03
Abstract:As the congestion at urban intersections becomes more serious,the intelligent control of traffic lights is particularly important. In order to improve the traffic efficiency of urban intersections,this paper describes a real-time timing algorithm of fuzzy control for traffic lights. By using the Matlab fuzzy tools and system test simulation,a clear fuzzy control table is obtained. It is expected to provide reference for the optimization of intelligent control system of traffic lights.
Keywords:traffic lights;fuzzy control;real-time timing algorithm
0 引 言
随着汽车保有量不断增多,城市拥堵愈发严重。解决城市拥堵问题,一方面可持续完善交通基础设施建设,使之与现代交通方式相匹配;另一方面可通过升级现有的交通管理系统,使之更智能、便捷、高效,从而更好地适应机动车数量的不断增长。作为交通管理系统的重要组成部分,交通灯定时控制系统在调节车流量、降低拥堵时长等方面发挥着重要的作用。然而,近年来随着汽车保有量的不断增多,城市交通拥堵的状况愈发严峻,传统的交通灯定时控制系统已经不能够完全满足现代交通发展的需要。基于智能控制技术的交通灯控制系统便被提出,并受到国内外研究学者的广泛关注[1,2]。作为智能控制技术的一项重要分支,自1977年城市单向单路口模糊控制法提出来之后[3],模糊控制技术便被广泛应用,其中包含交通灯控制系统。将模糊控制技术应用于交通灯控制系统中,能够有效地应对交通系统的随机性和复杂性,有效提升交通控制的安全性和时效性。本文基于单路口交通灯控制系统,阐述了交通灯模糊控制的实时配时算法及清晰化的模糊控制规则表生成方式。
1 单路口的相位设定
十字交叉路口模型及相位图如图1所示。东西南北方向均分为左行道、直行道和右行道,车辆在相应车道中通行。在实际应用中,由于右行车辆仅会与人行道上的行人产生冲突,故只需采用定时控制的方式将车辆和行人分开交替通过即可,不纳入模糊控制讨论范围内。为了实现对进入十字交叉路口内各个车道的车流量进行统计,分别在东西南北四个方向的左行车道和直行车道中设置两个车辆检查器(前端检测器和远端检测器,两个检测器间距200米)。同时,为保证车辆有序通行,将东西南北方向的左行道、直行道按照车辆的通行顺序分为四个相位:东西直行相位s1、东西左转相位s2、南北直行相位s3以及南北左转相位s4。
2 单路口模糊控制器设计
2.1 交通信号模糊控制原理
模糊控制器结构如图2所示,输入参数经过量化后,在控制器内进行模糊化、推理、解模糊等操作,再将结果进行量化后输出至控制对象处,实现模糊控制。
在本文所阐述的交通信号模糊控制系统中,第一个输入变量是当前通行相位上的车辆排队长度Qn,第二个输入变量是下一个相位(即交叉相位)上的车辆排队长度,经过模糊控制器处理后,输出的值是当前通行相位上的绿灯延时时间Ty。交通灯模糊控制算法如下:
步骤1:将当前通行车道相位设定为K,并根据实际需求,将每个相位的最短绿灯时间Tkd设定为20s,最长绿灯时间Tkc设置为50s,黄灯设置为3s;
步骤2:当相位的最短绿灯时间Tkd要到时,系统检测当前通行相位车辆排队数量Qn和下一相位(交叉相位)车辆排队数量Rn;
步骤3:当Qn=0时,通行权交由下一相位,系统返回步骤1继续运行;当Qn<λ且△l=Qn-Rn<σ(λ和σ是根据交通流量设定的阈值),通行权交由下一相位,系统返回步骤1继续运行。当前绿灯相位运行时间达到最长绿灯时间Tkc时,通行权也同样交由下一相位,系统返回步骤1继续运行。当以上条件均不满足时,系统继续往下运行;
步骤4:将Qn和Rn送入模糊控制器中,确定当前绿灯相位的绿灯延时时间Ty,若Tkd+Ty≥Tkc,则此时当前相位最长绿灯时间为Tkc。若Tkd+Ty 2.2 模糊控制输入输出设计 由于车辆排队最大长度为200m且一辆车大概占据5m的距离,可知当前绿灯相位上的车辆排队数量Qn和交叉相位上的车辆排队数量Rn的基本论域范围均为{0,1,2……40},为了简化模块控制规则,将该基本论域量化为{0,1,2……20},量化因子为0.5;同时在该基本论域上定义七个模糊子集,{很少,少,较少,中等,較多,多,很多},简记为:{VF,F,LF,M,LL,L,VL}。根据综合分析,输入变量Qn和Rn的隶属度函数为三角形,如图3所示。
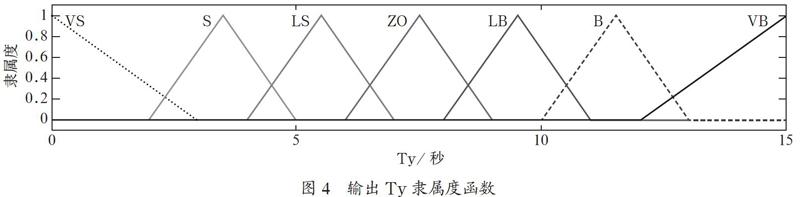
根据前文设定,每个相位的最长绿灯时间Tkc为50s,最短绿灯时间Tkd为20s,因此可以确定当前通行相位绿灯延时时间Ty的基本论域范围为{0,1,2……30},经量化后为{0,1,2……15},输出量化因子为2。在量化后的基本论域中定义七个模糊子集{很短,短,较短,中等,较长,长,很长},简记为:{VS,S,LS,ZO,LB,B,VB}。根据分析,输出Ty的隶属度函数也为三角形,如图4所示。
2.3 模糊控制规则设计
根据十字交叉口车辆通行规律和专家经验[4],制定模糊控制规则表,如表1所示,行表示当前绿灯相位车道排队车辆数的多少,列表示下一相位(交叉相位)车道排队车辆数的多少。从表1中可以看到,当当前绿灯相位排队车辆数Qn为LS(即较少)且下一相位车道排队车辆数Rn为LL(即较多)时,可知当前相位绿灯延时时间Ty(中间数据)的值为LS(即较短);同理,当当前绿灯相位排队车辆数Qn为VL(即较多)且下一相位车道排队车辆数Rn为VF(即非常少)时,可知当前相位绿灯延时时间Ty的值为VB(即非常长)。
3 结果讨论
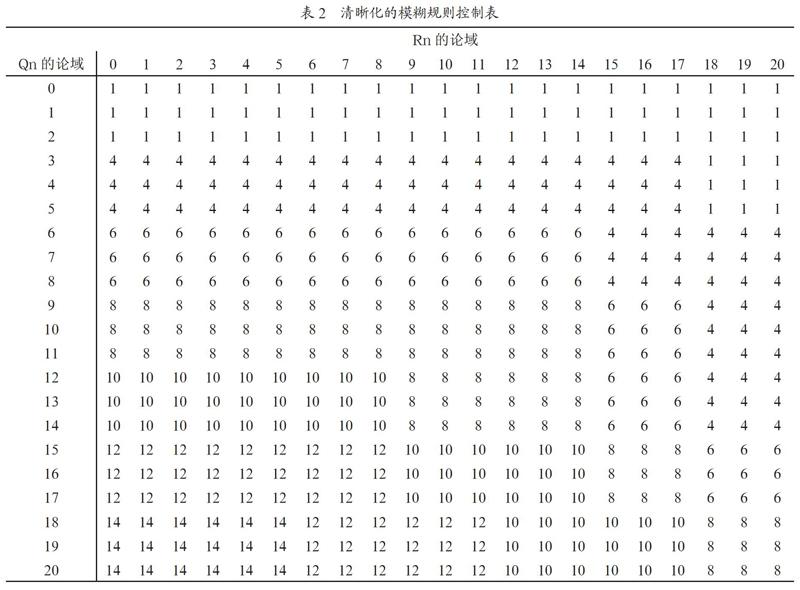
在Matlab的模糊工具箱中,将当前绿灯相位车辆排队数Qn、下一相位车辆排队数Rn及当前相位绿灯延时时间Ty的隶属度函数输入,并配置好模糊控制规则,在simulink中进行系统测试仿真,数据经过四舍五入后,得到如表2所示清晰化的模糊规则控制表。从该表可知,当Qn为15,Rn为12时,绿灯延时时间Ty乘以量化因子2后,延时时间为20s;当Qn为20,Rn为0、1、2、3、4或者5时,绿灯延时时间Ty乘以量化因子2后,延时时间为28秒,这与我们前文设计的最长延时时间30s相差无几。由该表,我们可以通过查询的方式,实现对交通信号灯的模糊控制,为交通信号灯控制系统的软硬件平台搭建提供思路。
4 结 论
随着城市化进程的不断深入,城市所面临的交通问题将越来越严峻。智能化的交通信号控制系统可以在无法继续完善交通基础设施的条件下,有效提高交叉路口通行效率,缓解交通通行压力,必将受到越来越多的关注。作为智能控制技术的一个重要分支,模糊控制技术在解决交通流量的时变性及不确定性问题上能发挥显著作用;且模糊控制技术还能和神经网络、遗传算法等技术结合起来,进一步完善功能,在未来交通信号灯的智能控制上将发挥出更大的作用。
参考文献:
[1] Timóteo,Ivo J. P. M,Araújo,Miguel R,Rossetti R J F,et al. Using TraSMAPI for the assessment of multi-agent traffic management solutions [J]. Progress in Artificial Intelligence,2012,1(2):157-164.
[2] H Richard. Development of major transportation projects in Califonria [D]. Virginia:Virginia Polytechnic Institute and State University,2007.
[3] PAPPPIS C P,MAMDAM E H.A fuzzy logic controller for a traffic junctiction [J].IEEE Trans on Systems,Man and Cybernetics,1977,7(10):707-717.
[4] 熊光洁,刘玉德,吴雪,等.城市道路区域交通信号控制系统的设计与实现 [J].交通与计算机,2008(5):115-118+122.
作者簡介:张永志(1987-),男,汉族,福建诏安人,讲师,硕士,研究方向:电子技术。