基于耐久路等效损伤的某电动SUV载荷识别
2019-10-21黄伦路
黄伦路


摘 要:针对某款新开发SUV电动汽车,根据道路试验规范规划耐久试验道路和里程分配,测量悬架轴头和减振器等位置的加速度及位移信号。研究道路测试数据的平稳性和等效缩减,建立了该车的刚柔多体模型,结合虚拟迭代技術进行载荷识别,计算出该车在试验场耐久道路上的轮心六分力。
关键词:SUV;等效缩减;载荷识别;六分力
中图分类号:U467 文献标识码:B 文章编号:1671-7988(2019)04-106-04
1 前言
耐久性是被考察对象在一定时间内能够正常使用的能力[1]。电动汽车受到续航里程的要求需要进行轻量化设计,但仍必须保证其疲劳耐久性能。疲劳耐久试验是验证整车和零部件寿命的唯一手段,目前有实车用户道路试验、试验场试验和实验室内测试三种途径。汽车企业对新车型疲劳寿命评估的传统方法都是利用实车在道路试车场进行路试,该方法是最直接且最准确的,但测试时间十分冗长且人力和经费耗费巨大,发现问题后难以改进设计。
用于疲劳寿命预测的Palmgren-Miner模型可以处理复杂的载荷,该模型讨论了分析疲劳的方法,将其视为由载荷循环、不同的计数算法和载荷循环的路径引起的。如何根据用户使用里程或相应的试验规范,制定测试策略,运用数据处理方法估计部件的载荷谱是车辆设计和虚拟疲劳分析的关键步骤之一。另外,成熟的多体系统动力学方法可以解决诸如车辆,机器人等载荷计算的问题[2]。因此,基于试验场实测载荷信号进行轮心六分力估计逐渐在车辆部件载荷识别中得到应用。
本文中,载荷信号为广义载荷,包括加速度,位移、力和应变,轮心六分力指轮心处的纵向力、侧向力、垂向位移和轮心处的俯仰力矩、横摆力矩、侧倾力矩。
2 技术路线
系统动态载荷识别技术是根据已建立的多体动力学模型和实测的系统响应来反求作用在系统上的动态载荷,这是比系统动力学分析更为困难的第二类动力学逆问题[3]。该问题的困难在于动载荷在空间域具有分散性,在时域具有非平稳性,在频域上具有宽带性等,这使得待处理的问题在数学方程求解过程中往往是欠定的,病态的。
为确保疲劳设计的有效性并减少试验次数、缩短开发周期,对骡车样车进行载荷谱采集试验,采集在襄阳试验场共25种路面工况下的共计93个通道的载荷信号。通过对试验场道路的实测载荷信号进行轮次分析,验证了测试信号的时域平稳性。基于总伪损伤相等原理,提出将25种试验路面等效缩减为9种典型路面,消除了求解矩阵方程的病态问题,最终得到轮心六分力的载荷历程,其技术路线如图1所示。
3 路谱采集
3.1 测点布置
测试车辆为新开发四轮前驱SUV,其满载质量为2250kg,前悬为传统麦弗逊型式,后悬为多连杆变异结构。安装传感器的类型和测点如表1所示,测点主要布置在车型承载系统的特征点上,相关传感器参数如表2所示。
3.2 数据采集
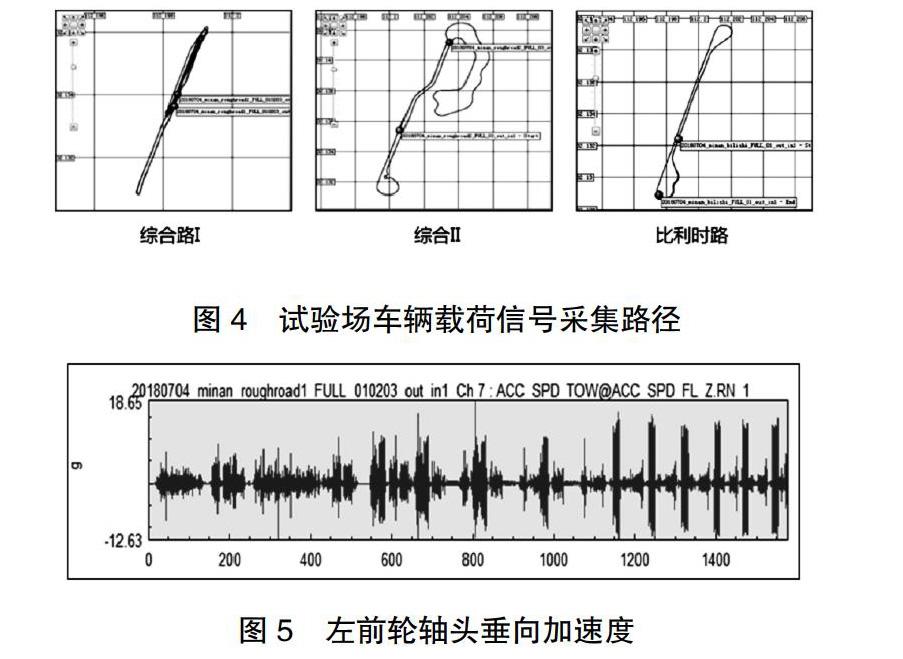
本文试验道路选择在襄阳东风汽车试验场,该试验场是将汽车正常行驶中遇到的不同使用条件和道路条件重现的试验场地,但试验道路经过了强化。耐久路分为高速跑道,强化坏路、山路、一般公路和越野路。本试验所用到的道路为强化路,其浓缩了汽车日常行驶过程中对整车耐久性影响最大的路面,主要包括比利时路、综合路I、制动路、综合路II等,图4展示了襄阳汽车试验场3种道路的轨迹,其细分共有25种路况,限于篇幅,这里不一一列举。
按照Q/MA T13170-2018[4],进行数据采集,其中图4为本次试验采集到的前轮轴头垂向加速度信号,其加速度区间为[-12.63,18.65]g,其中g=9.8m/s2,为重力加速度。
4.3 车辆多体模型关联
基于ADAMS/Car软件建立了该SUV整车多体动力学模型,运用虚拟迭代方法求解4个轮心处的六分力。为保证车辆模型的精度和后期各部件连接点载荷的正确性,在前期车辆操稳性能开发的基础上用MTS试验台测量了前、后悬架的K&C特性曲线。用测得的K&C特性对模型进行了关联,标定结果如图7所示,使得建立的载荷分解模型与实际车辆特性一致。
图中表示的是车轮垂向力与车身侧倾角之间的关系,即车辆侧倾角刚度。其中实线为在K&C测试台上测得的结果,为一封闭回线,反映了减振器作用下的阻尼迟滞效应,虚线为悬架多体模型仿真结果,是经过多次调整悬架衬套和缓冲块行程后得到的侧倾角刚度,此时模型仿真得到的角刚度曲线落在实测角刚度回线的中间,因此认为该模型是满足工程精度的,可以用于部件的载荷分解。
模型关联后,按照标定后的参数重新建立整车的载荷分解多体模型,定义了轮心六分力共24个激励通道,按照实车测点位置定义38个输出通道。
4.4 车辆部件载荷分解
利用虚拟迭代程序调用ADAMS车辆多体模型可以求得激励点的载荷估计值[8]。本文运用该方法来求得轮心六分力,在多体模型的轮心处创建白噪声小信号,表示车轮六分力随机载荷。根据激励和响应时域信号,通过Laplace变换,求得车辆多体模型的传递函数矩阵后,将缩减后各段典型路面的测量信号作为目标,通过将测量值与仿真值的差值乘以传递函数的广义逆矩阵来求得每步迭代增量。需要强调的是,为消除传递函数广义逆矩阵的病态性,要求输出通道的数量必须大于输入通道的数量[9]。
以共振路II为例,其属于驾驶路面,故不考虑制动力矩。经过10轮迭代后,各通道相对损伤比接近1,满足0.5~2范围内的精度要求,如图8所示。终止迭代过程,将此时轮心六分力作为整车模型的激励载荷时间历程,即完成了该SUV车道路载荷的识别,将此载荷作为多体模型的激励,计算得到车辆各部件的载荷,用于强度和疲劳分析。
5 结论
本文提出用轮次分析法检验道路谱测量数据的各态历经平稳性是车辆载荷识别的基础。基于伪损伤线性叠加理论在测量数据分析的基础上对25条道路等效缩减为9条典型道路,加快了载荷识别速度,解决了病态方程问题。对用于道路载荷识别的模型,运用模型关联技术对悬架衬套,缓冲块行程等进行了标定,使其与实车K&C测试结果吻合,得到满足工程精度的整车多体模型。最后基于虚拟迭代程序调用车辆多体模型,将实测数据设定为响应目标,通过10次迭代识别得到轮心六分力的载荷历程。
参考文献
[1] P?r Johanesson,Michael Speckert.GUIDE TO LOAD ANALYSIS FOR DURABLITY IN VEHICLE ENGINEERING 2014.
[2] Michael Blundell,Damian Harty. Multibody Systems Approach to Vehicle Dynamics. New York,USA,2014.
[3] 张方,秦远田.工程结构动载荷识别方法[M].北京:国防工业出版社,2011.
[4] Q/MA T13170-2018 汽车道路载荷谱采集方法.
[5] 王霄锋,汽车可靠性工程基础[M].北京:清华大学出版社,2007.
[6] 郑松林,周亚捷,冯金枝等.一种新的考虑伪损伤保留的道路载荷模拟试验加速方法[J].机械强度,2017,39(2):410-416.
[7] Yung Li Lee,Jwo Pan,R.B.Hathaway等 疲劳试验测试分析理论与实践[M].北京:国防工业出版社,2011.
[8] 邵建,董益亮,肖攀等.基于多体模型仿真的载荷谱虚拟迭代技术分析[J].重庆理工大学学报(自然科学), 010,24(12):84-87.
[9] 杨祥利,沈磊,袁刘凯等.虚拟迭代方法及其在驾驶室载荷分解中的应用[J].轻型汽车技术,2015,41(4):14-18.
