关于高速多脉冲激光测距系统的研究
2019-10-21李丽孙西花孔明
李丽 孙西花 孔明


摘 要 在脉冲式激光测距系统中,系统对回波信号的采集受噪声信号的影响,使得有用信号淹没在噪声信号中,引入测量误差。针对该问题本文高速采集系统对回波信号采用双FPGA进行2G的高速采样,并引进多脉冲相关叠加的方法,使得有用信号得到增强,噪声信号被相对削弱;并对叠加之后的信号进行卡尔曼滤波,将无用的高频噪声信号滤掉,使得后端数据处理更加精确,进而提高激光测距系统的测量精度和测量距离。在本文中采用两片FPGA,一片为主芯片,一片为从芯片,进行协调工作,实现高速AD采集,并进行相应的数据处理,使得系统达到高精度、远距离的测距效果。
关键词 高速采集系统;多脉冲相关叠加;卡尔曼滤波;激光测距
1系统结构图
该系统主要包括三个模块:激光发射单元、激光接受单元以及逻辑控制与信息处理单元。中逻辑控制与信息处理单元分为主FPGA、从FPGA、DSP信息处理单元,主FPGA与从FPGA之间进行相互通信,同时各自分别实现1G的采样速率,并分别做多脉冲互相关叠加运算,将运算结果存储在公共的DDR中,实现2G的采样速率。DSP再对共用DDR中的数据进行卡尔曼滤波[1],使波形更加趋于理想化,进而进行阀值检测得到运算结果。
2多脉冲相关累加算法
在脉冲激光测距系统中,由于有用信号的相关性极强,而噪声信号不存在相关性,将多个回波信号按照相关性进行相关性叠加,可以大大提高叠加之后信号的信噪比,进而提升系统的抗干扰能力。如式(1)所示
3高速数据采集方案实现
该部分实现对回波信号的数据采集,到达2G的采样速率,由于FPGA处理速度的限制,该模块使用2块FPGA分别控制一个高速AD采样芯片ADC08D1000对回波信号进行采样[4],两片FPGA进行信息通信,以达到协同工作的目的,同时为了减轻数据采集模块的运算负担,引進DSP模块,数据处理部分在DSP中进行。如图3所示,主FPGA控制从FPGA采样延后s,进而达到2G的采样速率。
4卡尔曼滤波器的DSP实现
卡尔曼滤波分为三个阶段:预测、转换和矫正[5]。DSP程序实现过程如图4所示,在预测阶段,使用状态预测方程对当前的状态进行计算,得到后一个状态的距离及其协方差的预测值。在转换阶段将预测阶段得到的预测值转换为卡尔曼滤波修正系数,最后在矫正阶段根据预测阶段的预测值和转换阶段的修正系数得到后一阶段的状态及协方差矫正值[6]。
其中,和分别为状态变量和观测变量;和分别为系统的状态转换矩阵和控制输入变量;以及维度转换参数矩阵,系统过程激励噪声,观测噪声。
假设为当前的状态,则可根据目前的的状态预测出状态,相关方程如式(10)和式(11):
其中,为各种状态下的距离结果;为各种状态结果对应的协方差;,为当前状态经过卡尔曼滤波优化处理得到的距离结果以及相应协方差;,为根据当前状态预测的距离结果以及相应协方差;为后一状态的控制量,DSP程序设计过程中,根据控制量的输入情况,对进行设置;为状态转换矩阵;是系统过程的协方差。则得到卡尔曼修正系数,如式(12)所示:
其中表示预估距离值和观测结果之间的维数转换关系,为观测噪声协方差矩阵。根据观测量的输入值,以及距离结果的预估值,可以得到经卡尔曼滤波后的距离及相应的协方差,如式(13)和式(14)所示:
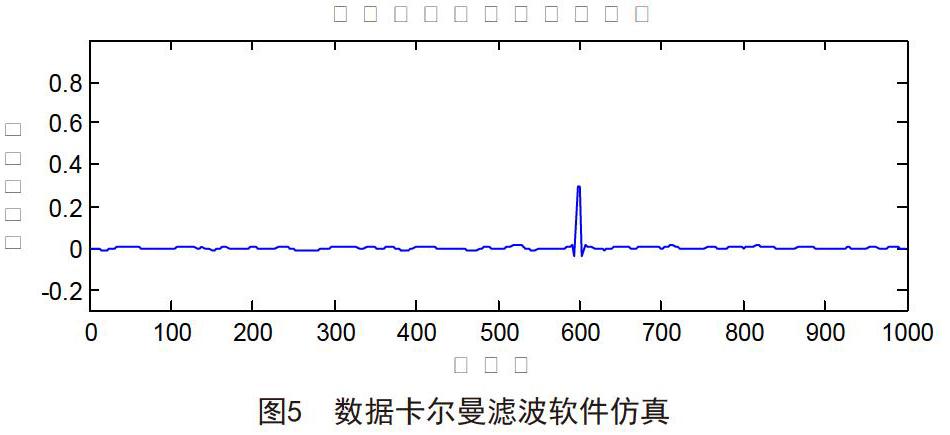
为经过DSP结算得到的距离初值,也是DSP模块的输入观测值,因为协方差更新公式中进行的是一维数组的测量且为单模量,所以设置为1。(8)式和(9)式中,根据白噪声的特点,设定和的初始值为0,后期根据实验对其进行修正。对本文中三次脉冲叠加之后的数据,进行卡尔曼滤波,仿真结果如图5所示:
由仿真结果可以看到,多脉冲相关累加信号经过卡尔曼滤波之后,噪声信号基本被滤掉,有用信号更加清晰可见,进而使得后端对数据的处理更加准确。
5试验结果分析
根据测量结果需求对近距离和远距离的情况分别进行试验,为了减小测量带来的误差,对每次试验分别进行7次测量,然后针对这7次测量结果进行均值处理,近距离和远距离激光测距结果如表1所示。
针对近距离测试,选取50m的距离进行测量,如表所示,测量7组数据,然后对该7组数据求取平均值,最终测量结果为49.98714,测量误差为0.01286m。远距离测试,选取2855m的距离进行测量实验,同样对该7组的数据进行平均值处理,最终测量结果为2854.371,测量误差为0.629m.
根据仿真结果可以看出采用双FPGA对回波信号进行交替采样,可以实现双倍的采样速率增大测量的精确度;然后对采样的回波信号进行多脉冲叠加,由DSP实现对叠加后的信号进行卡尔曼滤波,使得有用信号更加容易分辨。经测试在近距离和远距离测量中均具有极高的精度。
参考文献
[1] 高勤,李志强,都学新.一种新型自适应卡尔曼滤波算法[J].现代雷达,2001,23(6):29-34.
[2] 倪旭翔,胡凯.脉冲串互相关方法在远程激光测距中的应用[J].光学学报,2012,32(11):120-125.
[3] 黄本雄,侯洁,胡海.高斯白噪声发生器在FPGA中的实现[J].微计算机信息,2007,23(20):165-167.
[4] 常高嘉,冯全源.基于FPGA的高速数据采集系统的设计与实现[J].电子器件,2012,35(5):217-220.
[5] 邱晓波,谢志宏,周启煌.由DSP技术实现卡尔曼滤波算法初探[J].火力与指挥控制,1999,24(1):66-72.
[6] 邹振宇.基于DSP的Kalman滤波器的算法研究[D].成都:成都理工大学,2012.
