无信号公路交叉口事故预警防撞系统
2019-09-18崔梓钰
崔梓钰
(山东建筑大学,山东 济南 250101)
0 引言
近年来,随着机动车保有量逐年攀升,交通事故的发生率也逐年升高。由于无信号交叉口没有信号灯,在交叉口会车时,驾驶员必须凭借自身的经验来判断是否通过交叉口,而当驾驶员的主观判断出现错误或违反了交通安全法规时,相比有信号控制交叉口的情况下,无信号交叉口的事故发生概率急剧增大。据资料[1]显示,美国城市车辆交通事故的55%发生在交叉口,乡村车辆交通事故的32%发生在交叉口;中国城市的交通事故大约30%发生在平面交叉口。
因此很有必要研发一种无信号灯公路交叉口事故预警防撞系统,在车辆发生事故前发送预警信息进行有效的碰撞危险规避,保障车辆在无信号灯公路交叉口行驶的安全性。
1 系统简介
“无信号灯公路交叉口事故预警防撞系统”旨在为行至无信号灯公路交叉口的车辆提供安全的行驶方案,达到所有车辆安全通过路口,避免车辆碰撞的效果。系统主要分为微波车辆检测雷达、中央信息处理系统、结合ZigBee无线通讯技术和语音播报技术的车内饰件三部分(见图1)。微波车辆检测雷达设置在驶进路口方向的路旁,来检测车辆速度;中央处理系统作用为接收两冲突方向车辆速度信息,经过编入的冲突消解优化算法,得出双方车辆安全通行方案;车内饰件系统作用为通过ZigBee无线通讯接收中央处理系统得出的通行方案,并反馈至车辆,通过语音播报告知驾驶员,播报结果分为以下两种“请保持匀速行驶”、“请减速慢行”,以最直观,最简洁的告知方式使驾驶员准确地、安全地顺利通过交叉口而不发生交通事故。
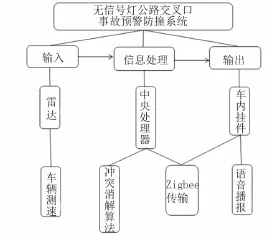
图1 无信号灯公路交叉口事故预警防撞系统系统组成
2 设计思路
本作品主要研究在公路存在的无信号灯交叉口,将交叉方向分为主路和支路,由于主路车流量大车速快,支路车流量小车速慢的特点,为提高道路通行效率和安全指数,确定以“支路服从主路”的原则,通过在主路道路一侧设置微波车辆检测雷达,检测主路方向来车速度,经过车辆冲突消解速度优化方法得出最佳通行方案,即最终双方车辆能够安全通过不发生事故的小路车辆做出的减速变化,将此方案信息传递至小路车内挂件接收器进行预警,从而达到司机主动规避危险、减低事故率的效果。
3 系统工作流程
车辆进入雷达区域:当车辆进入雷达探测区域即进入红色圆边界时,雷达开始检测车速;雷达探测的信息通过ZigBee通讯技术实时传递给中央处理器,中央处理器经过冲突消解算法程序的运行得出最佳通行方案;利用ZigBee通讯技术将方案信息传递至车内挂件,进行语音播报,播报结果为:“请保持匀速行驶”、“请减速慢行”。
4 区域及设备布置
“无信号灯公路交叉口事故预警防撞系统”的实现可由图2进行区域及设备设置说明。
4.1 区域设置说明
(1)小圆区域:交叉口冲突分为合流冲突和交叉冲突,两车道十字交叉口存在12个合流冲突点与16个交叉冲突点。由于支路宽度较小,而冲突点较多,特设置绿色圆区域作为冲突点的集中区域,将所有冲突点看为一个冲突点,此处不再分合流冲突与交叉冲突。
(2)大圆区域:为给整个系统运行留出充足时间,以及驾驶员接收信息后,能够稳定安全的做出减速反应,特设置红色圆缓冲区域。同时为减小绿色圆半径带来的误差,特将红色圆域半径设置为150 m。
4.2 设备布置说明
(1)中央处理器:设置于路口中心位置,便于接收、反馈各方向信息。
(2)雷达:设置于图中红色圆与道路交叉点,以探测速度后进行后续系统的工作实施,为车辆做出减速反应留出适当的缓冲时间。
(3)车内挂件:以车辆为载体,以普通车内饰件外观包装,设置于车内,作为接收方案和反馈方案系统,有效地将结果传递给驾驶员,为其提供判断依据。
5 冲突消解方案设计
5.1 系统设计原则
为提高无信号灯公路交叉口道路通行效率和安全指数,确定以“支路服从主路”的思想。下文设计的冲突消解方案以此思想为前提,全部使小路车辆做出减速反应,而使主路车辆保持匀速。由于车内饰件置于每辆车内,中央处理系统根据车辆所在位置(主路或小路),判断发送信号。
由于支路道路狭窄且,车流量小,通过对身边驾驶员的走访调查,得知由于无信号灯控制加上支路路标设置不严谨,驾驶员可能会在多车道出现乱道现象,因此这里将支路当做一车道(单向)处理;主路为多车道,本作品研究以主路路面存在一车和两车情况进行研究,多车情况类似。
5.2 方案设计
5.2.1 两个方向的车同时到达雷达接受信号范围边界(见图3)
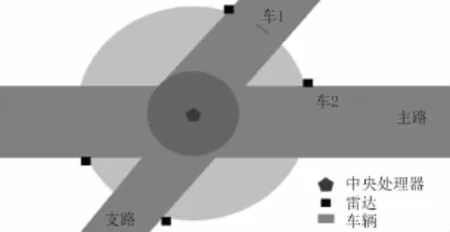
图3 两个方向的车同时到达雷达接受信号范围边界
(1)支路一车主路一车(设主路车速为v1,设支路车的速度为v2)(见图4)
a.v1=v2:支路服从主路,让支路上的车v2减速,主路上的车以v1保持原速度通过。
b.v1≠v2:两车不会发生冲突,均保持原速度通过即可。
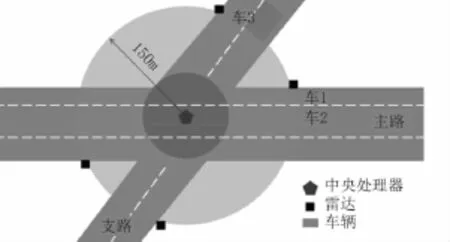
图4 支路一车主路一车
(2)支路一车,主路两车(多车同理)(主路车速为 v1、v2,支路车速为 v3)
a.v1=v3:
v2=v3时,令支路v3减速,v1、v2保持原速度通过。
v2>v3时,令支路v3减速,v1、v2保持原速度通过。
v2<v3时,令支路v3减速但不减至v2,v1、v2保持原速度通过。
b.v1>v3:
v2=v3时,令v3减速,v1、v2保持原速度通过。
v2>v3时,各路车辆v1、v2、v3均不用改变速度。
v2<v3时,各路车辆v1、v2、v3均不用改变速度。
c.v1<v3:
v2=v3时,令支路v3减速但不减至v1,v1、v2保持原速度通过。
v2>v3时,各路车辆v1、v2、v3均不用改变速度。
v2<v3时,各路车辆v1、v2、v3均不用改变速度。
5.2.2 两个方向的车不同时到达雷达接受信号范围边界
(1)车1先进入雷达接受信号范围边界
a.v2≤v1时,各路车辆v1、v2均不用改变速度。
b.v2>v1时,令支路v2减速至v1,v1保持原速度通过。
(2)车2先进入雷达接受信号范围边界
a.v1>v2时,令主路v1减速,v2保持原速度通过。(为确保安全,此处使主路车辆减速,是唯一不服从“支路服从主路”思想的一种情况)
b.v1≤v2时,各路车辆v1、v2均不用改变速度。
6 可行性分析
对于较城市中心偏远的不繁华的国道、省道以及城镇公路,大量投入高科技信息设备经济效益不高,在这种情况运用一些小型信息科技产品便能发挥其作用。目前我国有640多个城市,每个城市平均有40~50个路口需要监控,市场空间广阔。
测速以及计算系统技术成熟,主要应用雷达测速系统,利用多普勒效应原理,对运动车辆产生的多普勒频率进行频谱分析,并计算出其行驶速度。现在的雷达测速技术比较成熟,国内外均有较精确的雷达测速系统。
司机接收信号系统(反馈机制)简易美观:信号接收装置设计为一个小型吊坠,语音播报从雷达接收的信号,司机根据提示进行降速或正常行驶。
7 结 语
本系统检测装置主要采用较为常见且价格较实惠的雷达系统,计算机上的算法处理系统,以及位于车内的信息反馈系统,整个系统成本较低,适用于在较为偏僻的公路路口安装。并且能较准确的完成主路车流量状况、次路车流量状况、次路车辆参数(距离、速度、加速度等)等信息的采集。信息的处理过程尽可能优化:在中央处理系统,将信息采集子系统采集到的人、车、路的信息加以筛选、分析。通过具体算法的计算,得出详尽的引导策略,信息的表达途径清晰明确。
减少无信号灯公路交叉口会车的车辆之间的冲突,在一定程度上减少了因为没有信号灯控制而引起的交通事故,达到驾驶员能够主动准确规避事故危险的目的,保障车辆在无信号灯公路交叉口行驶的安全性。有利于保障民众的出行安全,降低无信号公路的事故率,提升道路运输的安全性,又能有效改善道路环境,对推动当地交通现代化、夯实其经济发展基础具有重大意义。
