基于物联网的地下停车场车辆引导系统
2019-09-17郭展宏马殷元郭夜啼
郭展宏,马殷元,郭夜啼
(兰州交通大学机电技术研究所,甘肃 兰州 730070)
随着我国汽车保有量的持续增加,停车位缺口的增大,停车难的问题日益凸显。停车场内车辆进出泊车与停车位的实时信息不匹配造成地下停车场车位利用率低,也制约着场内的高效泊车[1]。市面上涌现出许多车位和车辆监控方法,其中基于地磁传感器和视频监控的方法在新建停车场中使用较多。如果采用同样方法对现有室内停车场进行改造将存在以下缺陷:根据市场调研,在停车场通信方式上目前国内大多采用有线传输方式进行车位采集,有线传输需要对现场进行布线,当出现线路问题时维护成本较高;地磁传感器是地埋式的,在安装时需要对路面做较大修整,容易造成原有设施的大面积破坏;视频监控技术受白昼光线影响较大[2],技术还未完全成熟,且布置成本高;在供电方面采用有线方式较为繁琐。此外,驾驶员不知道每个停车区域的车流量情况,在停车场内迂回地寻找车位,容易造成停车场内车辆区域局部性拥堵[3]。针对以上问题,本文提出一种基于ZigBee无线传感网络的地下停车场车辆引导系统。
1 物联网技术
物联网(IoT)是通过IP (互联网协议)连接传感器、执行器、网络和机器设备全球系统。在物联网中连接的传感器用来感知和收集实时数据,并采用相应的无线传感网络实现相互通信,收集到的数据在互联网上共享,经处理和分析后的信息用于各种应用程序[4-5]。本系统所采用的ZigBee无线传感网络可拓展节点多,适用于地下停车场内多车辆多岔口的应用场景。
2 系统总体结构
图1所示的地下停车场车辆引导系统主要由4部分组成。1)位于地下停车场入口的用户车牌信息采集装置,实现对车辆信息进行采集,将车辆信息传输给引导系统。2)安装在地下停车场关键路口的LED显示屏,方便对进入停车场的用户进行分时分区引导找到有效车位。3)位于地下停车场停车位上的多路车位信息采集节点,包括多传感器模块及由节点构成的自组织ZigBee无线传感器网络,实现对车位信息的动态检测。4)区域道岔口车流量检测节点,实现对每个区域内的车辆数目进行检测,当上位机在获知各个区域的空车位信息及各道岔路口的车辆数目后,在引导屏的提示下分时分区地动态引导驾驶员进入有效停车位,以避免高峰期由于系统不知道车位与地下停车场某区域内的待停车的车辆数目而造成的无效引导,节省巡泊时间。
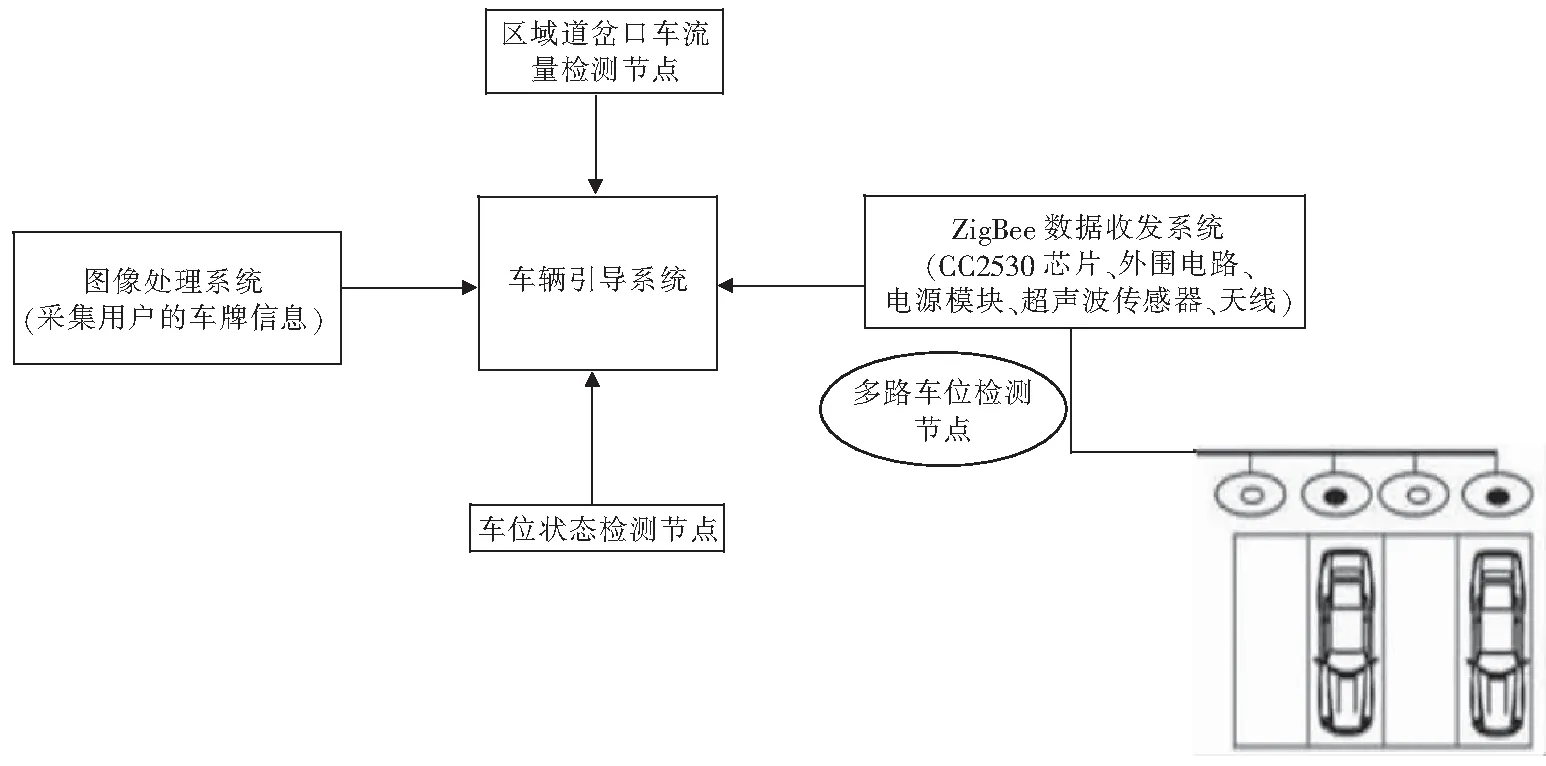
图1 地下停车场车辆引导系统功能结构图
3 地下停车场车辆引导系统硬件设计
该系统的硬件主要包括超声波传感器模块、ZigBee无线射频收发模块、LCD显示模块等[6]。这些模块以ZigBee模块为核心进行数据的采集和发送,并将其最终上传至协调器节点,通过该节点汇总至上位机的车辆引导系统。
3.1 超声波传感器模块
该系统采用HC-SR04超声波传感器用于检测地下停车场车位的状态。其工作原理是向输入引脚触发信号,传感器内部将会发出8个40 kHz的周期电平并检测回波,依据收集的时间信息计算相应的物理量,并采用Zigbee技术将信息上传给上位机,如图2所示。
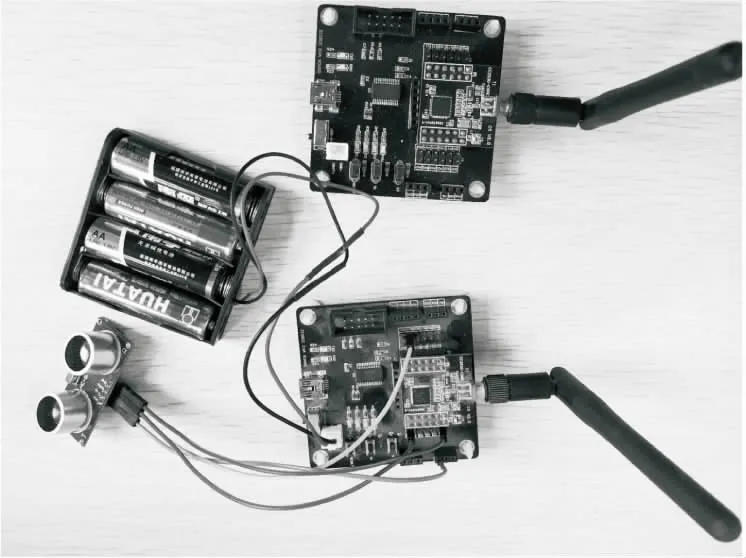
图2 信息采集试验模块
3.2 ZigBee无线射频收发模块
在传输方式上以 CC2530 芯片为核心,采用低耗电、低成本、低复杂度的近距离ZigBee无线传感器网络[7]。CC2530是51单片机的增强型模块,能够进行无线数据收发。在ZigBee 无线传输网络的设计中,电源滤波电路、时钟电路、射频电路等CC2530 的外围工作电路在 ZigBee 模块的核心板中已经包含,如图3所示。
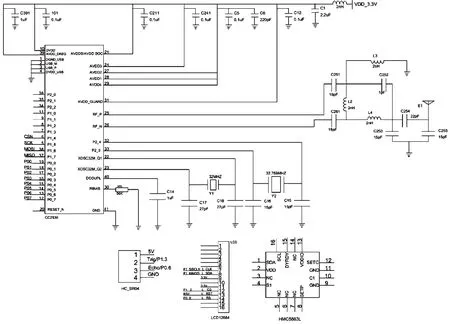
图3 硬件总体电路
3.3 LCD显示模块
系统需要能同时显示字母、数字以及符号,以实现对车辆引导,LCD12864芯片能满足系统需求。故本系统选用LCD12864芯片。
3.4 区域车辆检测
3.4.1 区域车辆流量记录
车辆流量检测通过吊装在停车场区域道岔路口上方的2路超声波传感器实现。在车辆进出某一区域时,根据车辆被超声波检测到的先后顺序不同,来判断车辆的进出方向。通过Zigbee终端模块的计数器统计超声波检测的脉冲数,记录停车场内的区域车流量。Zigbee终端模块将记录下来的数据通过路由节点上传给与PC机连接的协调器,上位机平台将收集到的信息进行判断,给停车场内的引导屏发出引导指令,使车辆交错行驶避免拥堵。
3.4.2 车位状态检测
由于地下停车场的建设规范高度约为3 m,现有车辆高度为1.6~2.1 m,故将超声波传感器布置在停车场内上方2.5 m的位置。当超声波传感器在1.6~2.1 m间检测到信号,表示有车辆进出。
4 系统软件设计
系统采用美国德州仪器公司的CC2530芯片,因而选用IAR嵌入式工作平台集成调试。该系统的软件程序主要包括传感器的系统数据采集、LCD 显示、车辆流量检测以及车位状态模块。
4.1 车辆流量检测子程序
视频特征提取、红外线传感器以及磁感应传感器等都能够实现对车流量的检测[8]。结合停车场的实际环境条件及安装的便捷性,该系统采用了2路背对式超声波传感器A和B,当传感器A检测到距离有所改变后传感器B才检测到距离的变化,则代表着车辆进入了该停车区域,否则相反,然后将车辆计数信息传输给计算机。车辆流量检测的流程如图4所示。

图4 区域车辆流量检测流程图
4.2 车位状态检测子程序
地下停车场内车位状态的检测是根据CC2530模块对超声波传感器的TRIG(触发)和ECHO(回响)2个引脚进行控制实现的。该模块对发射信号到接收回响信号的时间间隔进行记录,从而计算车位上空距离的变化,并将采集到的信息无线传输给ZigBee节点。车位状态检测的流程图如图5所示。

图5 车位状态测流程图
4.3 车辆引导路径搜索算法
根据该系统中停车场的车位检测装置获得的空车位信息,针对传统Dijkstra算法[9-11]中全节点盲目搜索的不足,在车辆路径引导的搜索方向和搜索范围上进行了改进,其正向搜索算法基本步骤如下。
1)首先给出对应的源节点S和目标节点M,用E1,E2表示对向搜索过程中遍布的节点。
2)依据扇形搜索范围进行区域化搜索,查找假定的扇形限制角2α内的遍布节点,并存储在集合A中,否则存入B中。
3)找出集合A中所有与源节点S中相距最短的节点n(即S和n的道路权值最小),以此作为源节点的下一个搜索起点进行循环。
4)当E1和E2集合的交集满足不为空集时停止搜索判断,最终输出最优路径结果。反向搜索与正向搜索步骤相同。
5 仿真测试
地下停车场车辆引导系统路径优化是最短路径的一个相关应用,在完成车辆泊车检测系统软硬件的搭建后,以某高铁站地下停车场为例进行了简单的系统测试,对停车场内单个区域路口车流量和区域内车位进行了采集。在实验中观察到58辆车辆经过终端节点进出G区域,系统检测到56次数据并上传计算机,检测率为56/58×100%=96.55%,进而计算出该检测系统的误差约为3.45%,具体车辆和车位检测结果如表1所示。图6所示为停车场中某一时刻的交通情况,此时各个节点之间的权值的大小根据场内节点间距离和各道岔路口车辆进出区域数量确定。在仿真测试中采用MATLAB编程,规避区域局部性拥堵,同时使驾驶员在停车结束后步行至电梯的路程最短,基于改进Dijkstra搜索算法得到的车辆从入口到有效车位的最优有效路径为D1→D2→D6,驾驶员行车至A3车位,如图7中红色引导线所示,其中当前时刻道路权值标注在每条边上。结合图6和图7可以看出,所引导的路径有效避开了多车辆路段D4→D6段,达到了该系统的初始目的,能够使驾驶员快速到达并有效泊车。
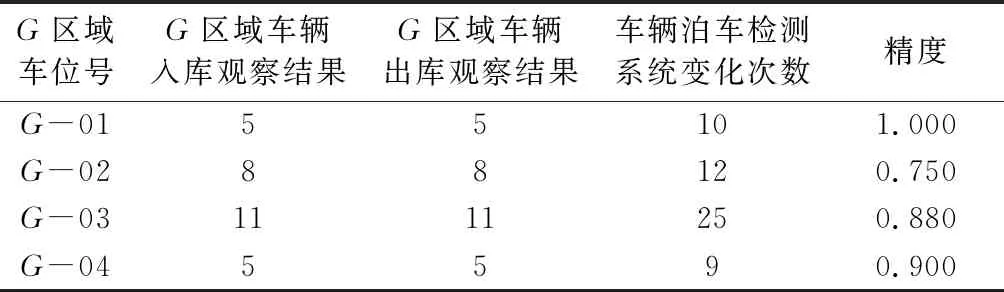
表1 车辆泊车实时检测结果
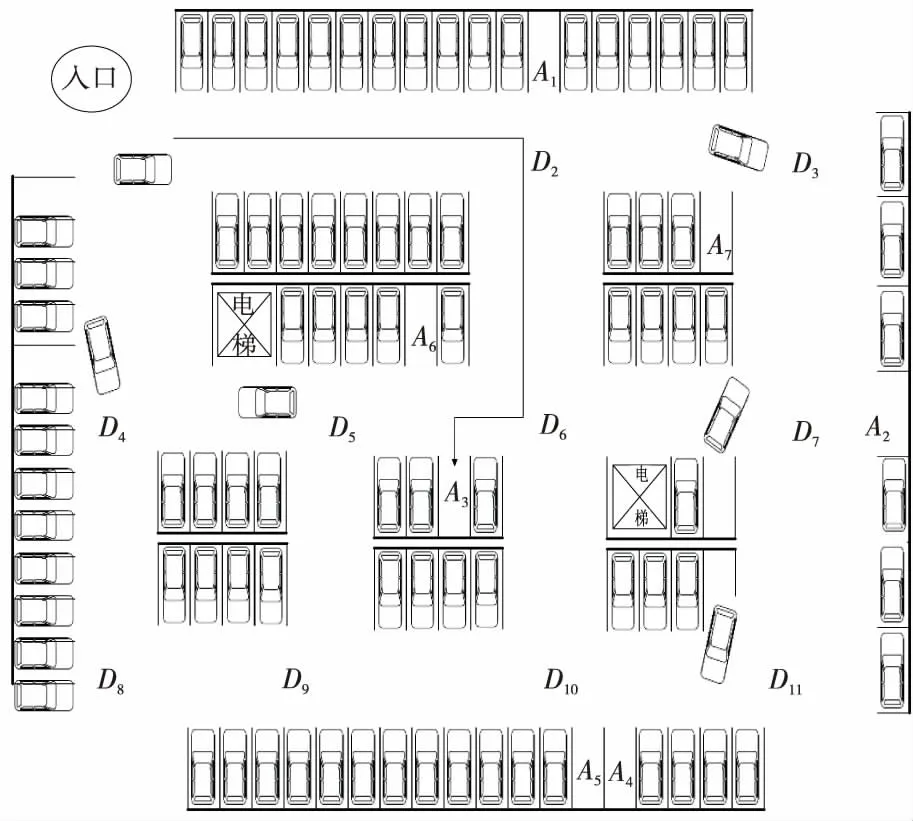
图6 地下停车场某时刻平面示意图
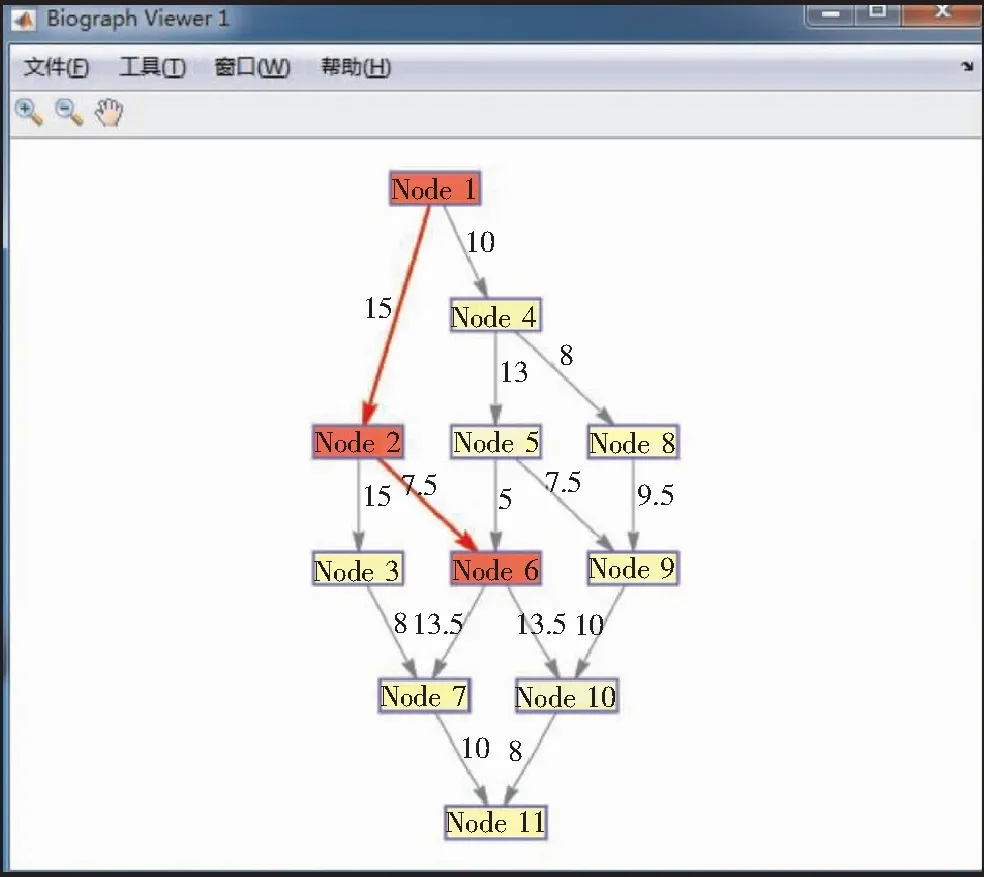
图7 车辆引导最优到达路径规划示意图
6 结束语
针对地下停车场人工管理方式存在的停车场内剩余的车位信息不明确、未占用停车位的位置不清楚、车辆区域局部性拥堵、车主停车时不能及时找到空停车位、停车位利用率低等问题,设计了一种基于无线传感网络的车辆引导系统。该系统能通过ZigBee无线传感网络对停车场内的空车位信息及区域车辆流量进行主动获取;能充分考虑驾驶员停车和到达电梯的路程,使其最短,规避了车辆的区域局部拥堵,对驾驶员进行高效的路径引导,提高了泊车效率。
