系统H∞范数计算:Lyapunov函数的直接优化方法
2019-09-15刘秀翀王占山
刘秀翀 王占山
H∞控制理论主要研究抑制干扰和不确定性问题[1].在H∞控制理论中,传递函数(或系统)的H∞范数是一项重要的性能指标,用于度量扰动输入对系统输出的影响,反映了闭环系统的抗扰能力.在H∞控制理论研究中,长期存在一个挑战性议题:是否能够直接给出关于H∞范数的通用解析表达式,进而避免针对线性矩阵不等式(Linear matrix inequality,LMI)约束条件的繁琐的H∞范数近似寻优方案.
在20 世纪80 年代,H∞控制理论的研究由频域转换到时域,开启了基于状态空间方程描述的系统鲁棒性能研究[2].总的来说,H∞性能时域分析面临的核心问题是如何选择适当的李雅普诺夫函数.具体表现为基于李雅普诺夫方程[3−4]或参数化Riccati 不等式[5]均难以得到用于精确分析系统H∞性能的最优李雅普诺夫函数,因此在早期的研究中结果的保守性是难以避免的.
为精确求解H∞范数,有学者提出了有界实引理[6],并将求解H∞范数问题转化为时域状态空间的约束优化问题.基于有界实引理给出的LMI 约束条件,H∞范数能够被近似寻优[7−14].在LMI 方法中,H∞范数的寻优一般包含以下步骤:
1)给出一个充分大的初始H∞范数估计γ;
2)解LMI 问题;
3)递减H∞范数估计γ,直到获得满足LMI 条件的最小H∞范数估计γ.
显然,一旦最小H∞范数估计得到,则通过解LMI,可以得到相应的近似最优李雅普诺夫函数.不难发现,LMI 方法存在一定不足,表现为:
1)对于每一个给定的γ,LMI 条件需要被重复求解,直到找到最小的H∞范数估计,过程过于繁琐;
2)这种试凑逼近方法无法揭示系统结构和参数对H∞性能的影响,在一定程度上限制了控制器精细设计的研究.
为了克服目前关于H∞范数问题研究的不足,一个可替换的方法是直接优化李雅普诺夫函数,进而得到关于H∞范数的通用解析表达式.目前,针对系统具体性能,难以找到李雅普诺夫函数设计的充要条件,因此这方面的研究并不多见.事实上,在分析系统具体性能时,存在最优的李雅普诺夫函数,并且这一最优李雅普诺夫函数与系统结构和参数存在内在关系[15].因此本文尝试寻找一种李雅普诺夫函数的直接优化途径,进而实现H∞性能的精确分析.
由于多数高阶系统在一定的条件下可以近似(或分解)为二阶系统来研究,并且二阶系统的分析方法是分析高阶系统的基础[16],因此为有效展现最优李雅普诺夫函数与系统结构和参数存在内在关系,本文针对一类二阶系统的H∞范数问题,构造和优化李雅普诺夫函数,进而得到H∞范数的通用解析表达式.本文的研究避免了LMI 方法中繁琐的近似寻优过程,并展示了系统矩阵特征值的实部和虚部对H∞性能的影响.本文结构如下:第1 节分析H∞范数问题;第2 节分析Riccati 不等式中李雅普诺夫函数的选择对求解H∞范数的影响;第3 节展现李雅普诺夫函数的直接优化方法,并给出H∞范数的通用解析表达式;第4 节给出算例,验证李雅普诺夫函数直接优化方法的有效性.
1 问题的提出
1.1 问题描述
系统描述为

其中,x ∈R2,A为Hurwitz 矩阵,A的特征值为复数,w为扰动输入,≤δ,δ为常数,
研究的问题是如何得到系统(1)的状态上界.在数学意义上,这一问题可转化为关于输入–输出系统的H∞范数问题,其中系统描述为

在H∞控制理论中,系统的H∞范数定义为S右半平面上解析的有理函数阵的最大奇异值.在标量函数中就是幅频特性的极大值,代表了系统对峰值有界信号的传递特性.
1.2 LMI 方法分析
令李雅普诺夫函数为V=xTPx,γ为系统(2)的H∞范数,即γ=∥G∥∞,其中G(s)=(sI −A)−1为系统(2)的传递函数.根据有界实引理,可得

LMI 方法是寻找式(3)中γ的最小值γmin.由于李雅普诺夫函数V=xTPx可以任意构造,因此对于每一个给定的γ,需要重复求解LMI,以判断式(3)的存在性,直到γmin被找到.显然,在LMI 方法中复杂的优化过程是不可避免的.事实上,γmin与最优的P矩阵是一一对应的.如果能够直接给出最优的P矩阵,则γmin的表达式就能够得到,进而避免LMI 方法中复杂的优化过程.本文的工作是尝试提供一种新的途径来直接给出γmin的表达式.
2 H∞范数分析
根据特征值和奇异值分解原理,可以得到下面的特性.
特性1.对于系统(2)中特征矩阵A,存在可逆矩阵T,满足

其中,T=ΘT1×diag{t1,t2}×ΘT2,ΘT1和ΘT2为正交矩阵,t2≥t1>0,λ >0,ν >0.diag{t1,t2}表示对角元素为t1,t2的对角阵.
令α=t2/t1≥1,y=ΘT2×x,∆=ΘT2×w.由式(2)和特性1,得

其中,B=I为单位阵,并且系统(2)和(5)具有相同的H∞范数.
根据文献[5]中引理2.1,可以得到下面的特性.
特性2.对于系统(5),存在正定矩阵X,满足Riccati 不等式

其中,γ <ρ,γ=∥G∥∞为系统H∞范数,ε为趋于零的正数.
注1.应用Riccati 不等式一般会得到具有很强保守性的结果,但这种保守性并不是Riccati 不等式本身导致的.研究表明:基于李雅普诺夫函数的准确选择,可以将特性2 中Riccati 不等式转化为等式,进而精确给出H∞范数.因此,导致这种保守性的原因是:在应用Riccati 不等式时,目前尚没有有效的方法找到最优的李雅普诺夫函数.这正是本文研究李雅普诺夫函数构造(或优化)的动机.
令

其中,α≥1,

ι>0,k≥1,0≤θ≤π/4.
由式(8)构造的李雅普诺夫函数分解了“放缩”和“旋转”作用.这种功能的分解使李雅普诺夫函数的参数优化具有了可行性.
定理1.对于系统(5),系统H∞范数γ满足

其中,λmin(Υ)为矩阵Υ 的最小特征值.
证明.令X=ΘTKΘ,其中,K和Θ 由 式(8)给出.根据特性2 和式(7),得

则ρ−2≤λmin(Υ−εK−1K−1),由于γ <ρ,并且ε为趋于零的正数,则式(9)成立.
注2.根据定理1,可以优化李雅普诺夫函数的参数,以最大化λmin(Υ),进而精确估计系统H∞范数.因此,定理1给出了一种新的途径以得到系统的H∞范数.
3 李雅普诺夫函数优化
考查式(7)给出的矩阵Υ.由式(7)和式(8),可得
根据式(11),以最大化λmin(Υ)为目标,将给出一种李雅普诺夫函数的优化方法.
3.1 李雅普诺夫函数优化策略
令

则由式(7)和X=ΘTKΘ,得

其中,Λ=diag{σ1,σ2},σ1≥σ2,则

则根据Λ=diag{σ1,σ2},有σ1≥σ2,
根据式(14),(16),(21),(22)和定理1,存在Y3,使λmin(Υ2)>0,即Υ2正定.因此根据式(22),为了最大化Υ2的最小特征值,应使下面两个条件成立.
1)(y1+y2)y3+(y2−y1)a=0(例如y2=0,y3=a;或y1=y2=0).
2)Υ2的特征值相等(例如=σ1−σ2−4a2;或y3=(σ1−σ2)/4a).

基于以上分析,并根据式(9),(11),(14),(16)和(23),为了最大化Υ 的最小特征值,李雅普诺夫函数的优化策略设计为σ=0 和λ1=λ2.
3.2 李雅普诺夫函数参数优化
基于所给李雅普诺夫函数优化策略,进一步优化李雅普诺夫函数参数.
定理2.对于系统(5),系统H∞范数γ满足

其中,λ1和λ2由式(23)给出,式(23)中β由下式给出.

证明.考查式(11)给出的矩阵Υ.令σ=0,则

因此根据式(11),(12),(23)和0≤θ≤π/4,矩阵Υ 的特征值为λ1和λ2,其中β由 式(25)给出.根据定理1,可得式(24).
注3.基于李雅普诺夫函数参数矩阵Θ 的优化策略,定理2 进一步给出系统H∞范数的估计.,同时奠定了进一步优化李雅普诺夫函数参数k和ι的基础.
定理3.对于系统(5),系统H∞范数γ满足

其中,

证明.考查式(23)给出的矩阵Υ 的特征值为λ1和λ2.令λ1=λ2,即

其中,β由 式(25)给出,α≥1.
当α>1 时,由 式(25)和式(29)可知k≠1,并且得

当α=1 时,由式(25)可知(k −1)2≤0,即k=1.则根据式(23),(25),(29),当ι=λ时,得max(λ1)=λ2.
基于以上分析,并根据定理2 和式(23),(25),(29)以及(30),可得结论.
注4.通过给出李雅普诺夫函数参数ι的优化策略,定理3 进一步给出系统H∞范数的估计.根据定理3,可以直接优化李雅普诺夫函数参数k,进而得到系统H∞范数的精确估计.
注5.注意,当α>1 时,k≠1.因此定理3 通过分别讨论α>1 和α=1 两种情况,解决了f(k)的奇异问题.令

则由式(28),得

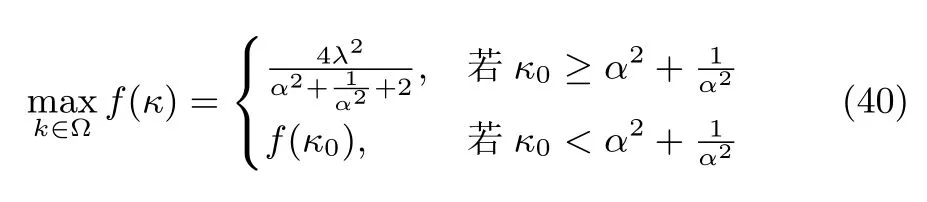
定理4.对于系统(5),系统H∞范数γ满足
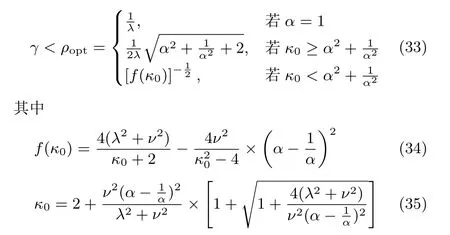
证明.由式(32),得

令f′(κ)=0,即

根据κ>2 和式(35),得κ=κ0.
根据式(35)∼(37),得

因此,在2<κ<∞的条件下,maxf(κ)=f(κ0),如图1(a)和1(b)所示.
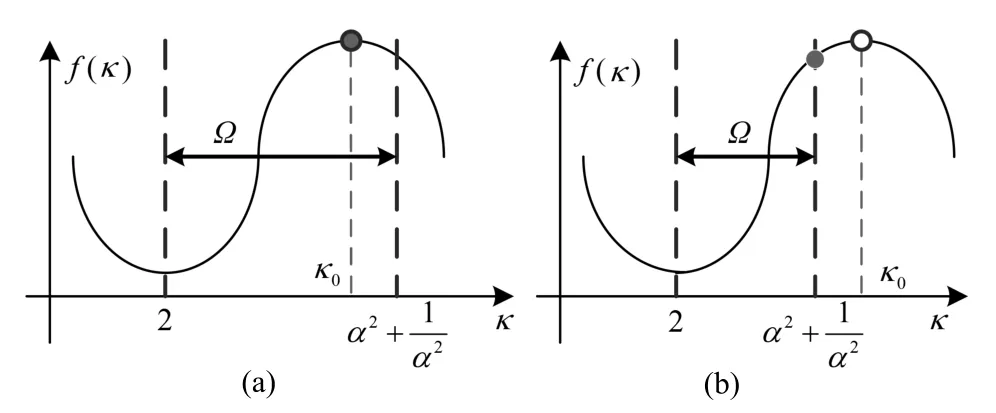
图1 函数分析Fig.1 Function analysis
注意,定理2 中李雅普诺夫函数参数矩阵Θ 的优化策略为σ=0,则由式(13),可得k≤α2.由于k >1,因此根据式(31),得

根据图1(a)和1(b),得
因此由定理3 可得结论.
注6.通过对李雅普诺夫函数参数的直接优化,定理4给出了系统H∞范数上界的优化结果.应用定理4,可以给出系统H∞范数的精确估计.
注7.不同于LMI 方法,本文提出的李雅普诺夫函数直接优化方法分析了李雅普诺夫函数的构造对系统性能分析的影响,充分利用系统结构和参数以优化李雅普诺夫函数的设计.与LMI 方法相比,李雅普诺夫函数直接优化方法能够直接给出系统H∞范数的精确结果,进而避免了复杂的数值优化过程.因此本文的工作提供了一种新的途径以更为方便地分析系统动态性能.
4 算例
考查系统
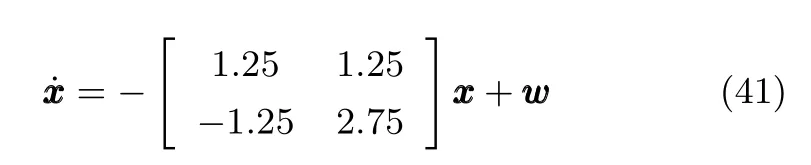
其中,w为扰动输入,≤1,x为状态输出.根据式(5),得

因此,λ=2,ν=1,α=2.
由式(35),得κ0=3.8651<=4.25.则根据定理4,得γ <ρopt=0.622.因此γ≈0.622.应用MATLAB中H∞范数求解函数hinfnorm(sys,0.0000001)可得相同的结果.因此提出的李雅普诺夫函数直接优化方法能精确给出系统H∞范数.
表1 进一步给出在不同参数条件下系统(5)的H∞范数.表1 表明,针对式(5)给出的具有不同参数的系统,提出的李雅普诺夫函数直接优化方法都能精确给出系统H∞范数.
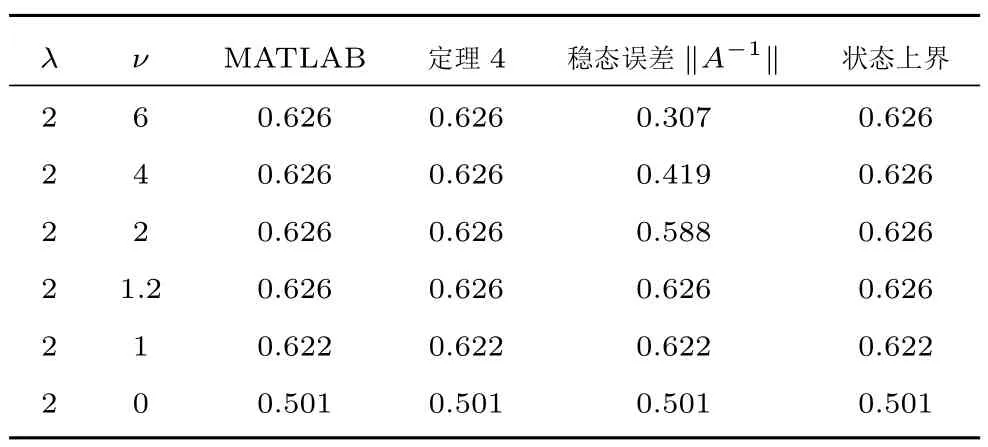
表1 H∞范数分析(α=2)Table 1 H∞norm analysis(α=2)
在α和系统特征值实部λ确定(即α=2,λ=2)的条件下,表1 给出的结果表明,随着系统特征值虚部ν变化,H∞范数的变化具有一定规律性,表现为:
1)当ν=ν∗=1.2(即κ0=α2+1/α2)时,H∞范数为
2)当ν <ν∗(即κ0<α2+1/α2)时,H∞范数与稳态指标一致;
3)当ν >ν∗(即κ0>α2+1/α2)时,H∞范数为固定值(即H∞范数的值与ν无关),并且根据定理4,H∞范数的表达式非常简洁.
由式(1),(3),(41),得
采用LMI 方法求解H∞范数的步骤为:
1)选择足够大的γ,如γ=10;
2)应用MATLAB 中LMI 工具求解式(43),可得P存在;
3)减小γ取值,如γ=1,应用LMI 工具求解式(43),可得P存在;
4)当γ=0.622 时,应用LMI 工具求解式(43),可得P存在;
5)当γ=0.621 时,应用LMI 工具求解(43),可得P不存在.
基于以上步骤,LMI 方法可给出H∞=0.622.这一结果与定理4 得到的结果一致,如表1 所示.
事实上,LMI 方法需要对γ进行遍历寻找.当选γ的间隔较大时,保守的结果不可避免.与之相比,本文的方法具有明显的优越性.
5 结论
本文针对H∞控制理论研究中难以精确求解系统H∞范数的问题,提出了一种李雅普诺夫函数的直接优化方法.通过优化Riccati 不等式中的李雅普诺夫函数,给出了H∞范数的通用解析表达式,进而提供了一个有效的途径以直接和精确求解系统H∞范数.研究结果具有以下特点:
1)与LMI 方法相比,本文所提方法避免了复杂的数值优化过程,使求解系统H∞范数简化.
2)与早期关于李雅普诺夫方程和Riccati 不等式的研究相比,本文所提方法避免了由于李雅普诺夫函数选择的随意性导致的保守结果.
3)本文所提方法能够展现系统矩阵特征值的实部和虚部对H∞性能的影响,为进一步精确(定量)控制系统H∞性能提供借鉴.
在进一步的工作中,将研究含有时滞及非线性项的系统.
