基于人体外骨骼便携按摩助力装备
2019-09-10陈新全应捷
陈新全 应捷


【摘 要】随着社会的发展,越来越多的子女选择离开家乡和父母。导致了社会上越来越多的空巢老人问题,而随着年龄增加,这些老人行动时愈发困难。为了解决老人们由于行动不便带来的种种问题,本项目根据人体基本构造原理,设计了帮助老人更好地走路、运动的“外骨骼按摩助力装置”。在为老年人助力行走的同时起到辅助按摩的效果。本作品根据单片机自动控制技术和机械设计原理,设计基于人体外骨骼便携助力按摩装备。该装置是针对在当前社会背景中暴露出的问题设计的一款辅助行动不便老年人行走,缓解其身体压力的按摩助力仪器。
主要功能:①辅助老年人正常行走,上坡、爬楼等日常活动。②对老年人背部按摩,缓解身体疲劳。
【关键词】外骨骼;髋关节助力;按摩
一、引言
自2020年起,中国进入了小康时代,但与此而来的是越来越多的老龄化人口。根据《2019-2025中国人口老龄化市场研究及发展趋势研究报告》的调查,目前我國已进入老龄化阶段,2020年我国65岁及以上老年人口比例达11.70%,即将步入深度老龄化,预计2040年我国65岁及以上老年人口比例超过20%,进入超老龄化社会。同时也伴随着一系列的社会问题,其中老年人的行动困难,无人帮助就是其中之一。
调查目前市场上现存的助力方式,可以发现外骨骼技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术。目前,全球有不少研发生产外骨骼机器人的企业。但当下直接读取操作者意图的传感器还不够成熟,比如EMG的数据噪音、建模口校准的难度都很大,比如说Hybrid Assistive Limb(HAL5)这款外骨骼采用了EMG信号控制机器人,但是需要2个月的时间来标定肌电信号。而且在动态环境中保持传感器的精确度是个很大的挑战,同样在使用交互力来控制外骨骼也有类似的问题。
目前,全球有不少研发生产外骨骼机器人的企业,其中欧美等发达国家康复机器人产业起步较早。目前,包括美国和以色列的产品在内,平均一台外骨骼机器人的价格在60-100万人民币之间。国外外骨骼机器人公司主要包括B-Temia、Lockheed Martin、Bionic Power等,其中做得比较出色的以色列的Rewalk、美国的EKSO都已经拿到了美国FDA的认证,日本的Cyberdyne也取得了CE认证,进入上市销售阶段。中国也有多家企业进入外骨骼机器人领域,并研发出了新产品。这些企业设计机器人大多投入军事使用,民用较少,且普及度较低。
此外,当下直接读取操作者意图的传感器还不够成熟,如EMG的数据噪音、建模口校准的难度都很大,如Hybrid Assistive Limb(HAL5)这款外骨骼采用了EMG信号控制机器人,但是需要2个月的时间来标定肌电信号。而且在动态环境中保持传感器的精确度是个很大的挑战,同样在使用交互力来控制外骨骼也有类似的问题。随着经济的不断发展以及人们生活节奏的不断加快,人们越来越重视老年群体的身心健康。而用推拿按摩进行保健,是我国中华医学的传统项目,特别当客户为老年群体时,应用范围会更加广泛。
二、机械设计
2.1整体结构设计
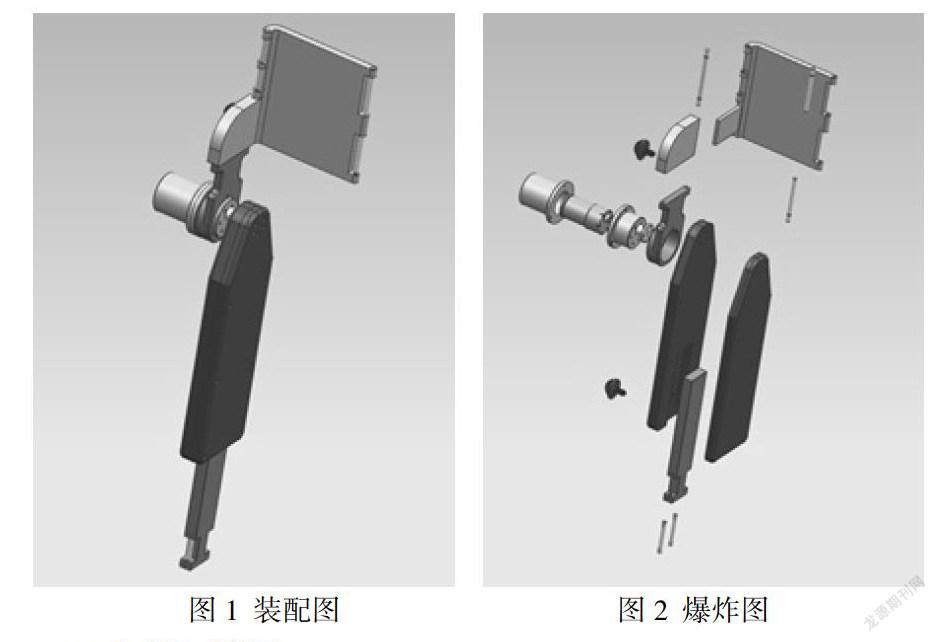
本机构结构基础为人体外骨骼装置,遵循基本的人体外骨骼设计,同时由于用途的特殊性,该人体外骨骼只作用于人体髋关节处,为行走时髋关节助力,因此整体结构集中在腰部及髋关节。整个机构有三处固定点,主要固定点为腰部,其次在两大腿处也有固定点,固定方式采用魔术贴带的方式连接,既可以调节长度,也保证了穿戴在身上时的舒适度。其整体的设计结构及装配爆炸图如图1图2所示:
2.2长度调节模块
介于不同人的身高及身材等各不相同,因此该外骨骼助力装备还设计有长度调节机构。考虑到机构整体质量不易过大,在长度调节机构的设计上采取尽可能轻量化设计原则,采用了M8螺纹紧固连杆长度调节的设计方法,在螺钉的端部安装橡胶垫片,起到了保护零件不被过度损坏,同时防止螺纹松动的作用。其结构设计如图3所示:
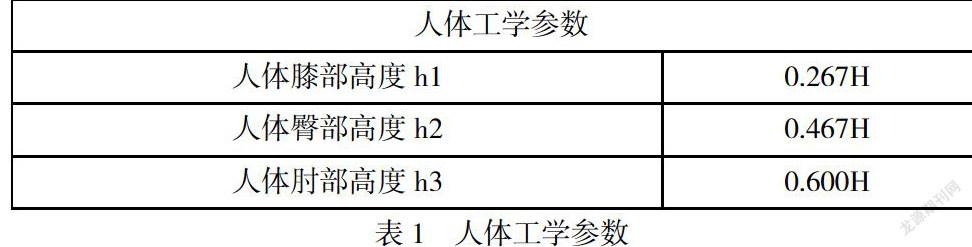
2.3各构件长度设计
各构件的长度尺寸结合人体工学进行设计,并且在功能上实现长度可调节的附加功能,使得该外骨骼机构在保证舒适性的基础上尽可能满足更多的人群。该机构所需要的人体工学残数如表1所示(设人体总高度为H)。取较多数老年人的身高区间在155-165cm的范围,则从髋关节位置到大腿底部的长度L的取值范围近似为(h3-h2)*0.5*(1550~1650)+(h2-h1)*(1550~1650)。由上述公式计算可得最终连接器和驱动连杆的总有效长度为413.075~439.725mm之间。因此取连接器的长度为300mm,驱动连杆长度为200mm,由于该机构需要具备长度可调性质,因此设计驱动连杆有效长度为100~150mm。经过以上设计计算可得最终该助力外骨骼驱动装置有效长度为400~450mm,可以满足设计的基本要求。
三、硬件及软件设计
3.1硬件整体设计
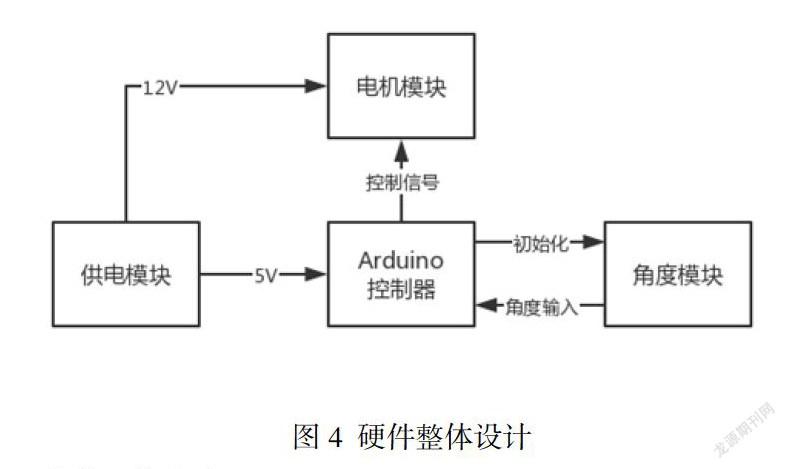
Arduino是目前较为流行的电子互动平台,基于单片机系统开发,具有使用简单、功能多样、价格低廉等优点,广泛应用于电子系统设计和互动产品开发方面。[1]因此本文介绍的“基于人体外骨骼便携按摩助力装备”的控制系统选用arduino控制器进行控制,由供电模块进行供电,陀螺仪负责读取角度输入值,电机则为机构运动提供动力。硬件整体设计如图4所示。
Arduino 系列单片机是一种基于开源代码控制板,其系列第一块主控板诞生于2005年,由意大利两名大学教师David Cuartielles和Massimo Banzi和他们的学生共同开发完成。本设计选用的Arduino UNO R3主控板,基于ATmega328微控制器,硬件资源主要包括14个数字I/0引脚,6个模拟输入引脚,1个DC接口,1个USB接口,1个复位按键等,足够支撑设计完成控制过程。
供电模块选用双L298n电机驱动模块,其外接电源后,能分别为arduino控制器和电机模块提供稳定的12V和5V的电压,保证两者正常工作;电机模块选用了MG540大扭矩编码减速电机和370型双头扇型震动电机。前者通过速度调节,其最大能提供2kg.cm的扭矩,足够带动机构负载正常运转。后者设置不同的转速,带动扇形头运动,达到多档调节按摩的目的;角度模块选用MPU6050,集成了3轴 MEMS 陀螺仪和3轴 MEMS 加速度计,其高分辨率(3.9 mg/LSB)能够测量不到1.0°的倾斜角度变化。[2]能够测量机构当前运行位置,并通过串口实时反馈给单片机。
3.2软件整体设计
程序主要实现功能过程是:开机后,单片机将此时机构运行位置记为0并设置震动电机输出模式,即初始化,运行过程中单片机根據角度模块测得的角度反馈给单片机,单片机对其角度进行处理,再根据读取用户是否切换震动电机模式,得到输出速度,通过PWM输出给电机。
程序流程图如图5所示:
四、材料强度及需求分析
4.1材料强度分析
该装置主要受力部件为电机与腿部杆件的连接件,其整体材料采用ABS树脂材质,加工方法采用SLA立体光固化成型,其具有精度高、速度快、表面光滑细腻的特点。同时ABS材料耐温47℃,抗拉强度(拉伸)为47MPa,延展率可达3%,弯曲强度为67MPa,弹性模量为2370-2650MPa。同时ABS材料密度为1.3g/cm³,强度高,并具有良好的机械性,适用于强度高可靠性高的场合,同时密度较钢材料小得多,适合于应用于外骨骼装置。各项材料性能均满足人体外骨骼的使用力学性能。
4.2需求分析
(1)腿脚不便的老年人口
本产品服务的对象是当前存在社会上的老龄人口。由于老年人身体素质较低,活动范围有限。有时想出远门时会依赖于代步器,如电动车、电动轮椅等,但这些代步器械在马路上行驶时很容易引发交通化工事故,带来不必要的隐患。
而如果老年人选择一直待在家中,就会很容易换上其他疾病,如糖尿病、肥胖症、产生心理问题,如抑郁症,对他们的身心造成极大的损害。所以,为老年群体的身心着想,他们需要一个辅助行走的工具,去创造出更好地生活空间。
(2)自身身体素质较差的老年人口
目前,我国存在大量的六层楼以下且没有电梯的老式居民楼,这直接导致部分老人由于自身身体素质差,上下楼梯异常困难,从而不想出门运动的问题。所以他们就更加需要一种轻巧、便携的借力工具帮助他们更轻松的上下楼梯,给他们更多的机会出门运动,以增强体魄。
久坐或拥有腰部疾病的老年人口本产品会通过绷带系在腰部,解决了老人行动时的腿脚不便;对于行走不便、只能久坐的老人,本产品通过腰部连接按摩装置,增加按摩功能,有效地预防和解决老年人腰部疾病,提高产品对用户的舒适度。通过促进功能多样化,扩大用户群体。
(3)子女外出务工的空巢老人
由于发达城市有更多的工作机会,很多年轻人离开了家乡父母、在外独自打拼。虽然会带给他们一部分可观的经济收入,但由于这一类群体常年在外,家中老人大多缺乏必要的关怀和照料,直接导致老人日常起居安全性无法保证。老人独自生活极易发生意外,有时细微的跌打损伤就容易引起严重的疾病。虽然富裕的家庭会通过聘请保姆的方式照料老人起居,但对于更多的普通家庭,他们难以承担保姆的费用,所以就需要一款在助力行走的同时能有效防止老人意外跌倒的便携式器械,以帮助家中老人们完成日常起居。
参考文献:
[1]蔡睿妍.Arduino的原理及应用[J].电子设计工程,2012,20(16):155-157.DOI:10.3969/j.issn.1674-6236.2012.16.048.
[2]赖义汉.基于MPU6050的双轮平衡车控制系统设计[j].河南工程学院学报(自然科学版),2014,01,53-57
[3]李银波,汤子汉,季林红,蒙奎霖,李质斌,关鑫宇.下肢外骨骼人机互连装置对关节内力的影响[J/OL].清华大学学报(自然科学版):1-7[2019-04-10].https://doi.org/10.16511/j.cnki.qhdxxb.2019.21.019.
[4]陈宁宁,曹吉文,王钰.外骨骼下肢运动步态的仿真研究[J].青岛大学学报(工程技术版),2019,34(01):101-104.
[5]李德英.基于AT89C52单片机的智能按摩器设计[J].吉首大学学报(自然科学版),2019,40(01):30-33.
[6]李剑锋,李国通,张雷雨,杨东升,王海东.穿戴式柔性下肢助力机器人发展现状及关键技术分析[J/OL].自动化学报:1-12[2019-04-10].https://doi.org/10.16383/j.aas.c180286.
(作者单位:江苏大学)
