工业机器人概率模糊支持向量机在线控制方法研究
2019-09-10徐淑琼袁从贵
徐淑琼 袁从贵

摘 要:本文针对工业机器人系统中存在的模糊信息和随机信息,结合模糊支持向量机理论、概率处理方法和自适应调整机制,提出了工业机器人概率模糊支持向量机在线控制模型。实验表明,该方法在保障快速性的同时,可以实现对模糊信息和随机信息的统一处理机制,提高了机器人在线控制的鲁棒性、跟踪精度和快速性。
关键词:概率模糊支持向量机;在线控制;工业机器人
中图分类号:TP391.41 文献标识码:A 文章编号:2096-4706(2019)22-0153-03
Abstract:Aiming at the fuzzy information and random information in the industrial robot system,combining with the theory of fuzzy support vector machine,probability processing method and self-adaptive adjustment mechanism,this paper proposes the online control model of the industrial robot probability fuzzy support vector machine. Experiments show that the method can realize the unified processing mechanism of fuzzy information and random information while ensuring the rapidity,and improve the robustness,tracking accuracy and rapidity of the robot online control.
Keywords:probabilistic fuzzy support vector machine;online control;industrial robot
0 引 言
工業机器人是由机械本体、控制器、伺服驱动系统和检测传感器装置构成的一种能仿人操作、可自动控制、重复编程,并能在三维空间完成各种作业任务的机电一体化设备[1,2]。工业机器人广泛应用于汽车及汽车零部件制造、机械加工、电子电气制造、食品加工等等大规模生产企业中,成为具备柔性制造系统(FMS)、工厂自动化(FA)、计算机集成制造系统(CIMS)的先进自动化工具。
机器人控制技术是影响机器人系统性能的关键部分,已成为目前机器人领域研究的热点和难点,许多问题有待解决。近年来,在线控制方法逐渐取代了传统的运动控制方法。对于日趋复杂化的机器人在线控制问题、数据驱动,特别是以支持向量机[3-5]为核心的建模方法,已逐渐成为人们研究的热点。这种模型利用非线性逼近能力,通过不断的学习训练,尽可能地逼近机器人在线控制的复杂过程。有的学者还提出了开放式多控制器的控制系统智能结构,将参数辨识与控制系统紧密结合,引入专家知识结构,有效学习选择最佳控制方案以提高控制性能。这种类型的建模,对一些典型的机器人控制可得到较好的性能指标,但是仍然存在一些不足。现有的机器人在线控制技术都忽略了对系统中存在的模糊信息和随机信息的综合处理,以最大限度地提升机器人系统性能以及各个性能之间的折衷,建立了一套完整的工业机器人概率模糊支持向量机在线控制方法。
1 工业机器人概率模糊支持向量机在线控制算法
工业机器人概率模糊支持向量机在线控制算法的设计包括了概率模糊支持向量机在线模型的结构设计、概率模糊支持向量机优化等方面。
2 实验验证
本文利用模糊理论,结合支持向量机提出了一种全新的概率模糊支持向量模型,并将其应用于工业机器人在线控制。下面给出工业机器人概率模糊支持向量机在线控制算法的实现步骤:
(1)工业机器人概率模糊支持向量机在线控制模型样本集的建立:利用工业机器人已有的历史数据,建立工业机器人概率模糊支持向量机在线控制模型训练所需的数据集 。
(2)概率模糊隶属度P j的设计:在概率模糊支持向量机模型的设计中,关键是对概率模糊隶属度的有效设计。在这里,我们可参考现有的模糊隶属度函数的设计方法,对本文所提出的概率模糊支持向量机模型进行合理的设计,可参照参考文献所涉及的方法[6]。
(3)工业机器人概率模糊支持向量机在线控制模型 的训练:利用已建立的工业机器人概率模糊支持向量机在线控制模型的训练集,同时结合设计好的概率模糊隶属度,可对工业机器人概率模糊支持向量机在线控制模型进行训练,得到工业机器人概率模糊支持向量机在线控制模型 。
(4)工业机器人概率模糊支持向量机在线控制:利用已经训练好的概率模糊支持向量机在线控制模型,可实现对工业机器人的在线控制。
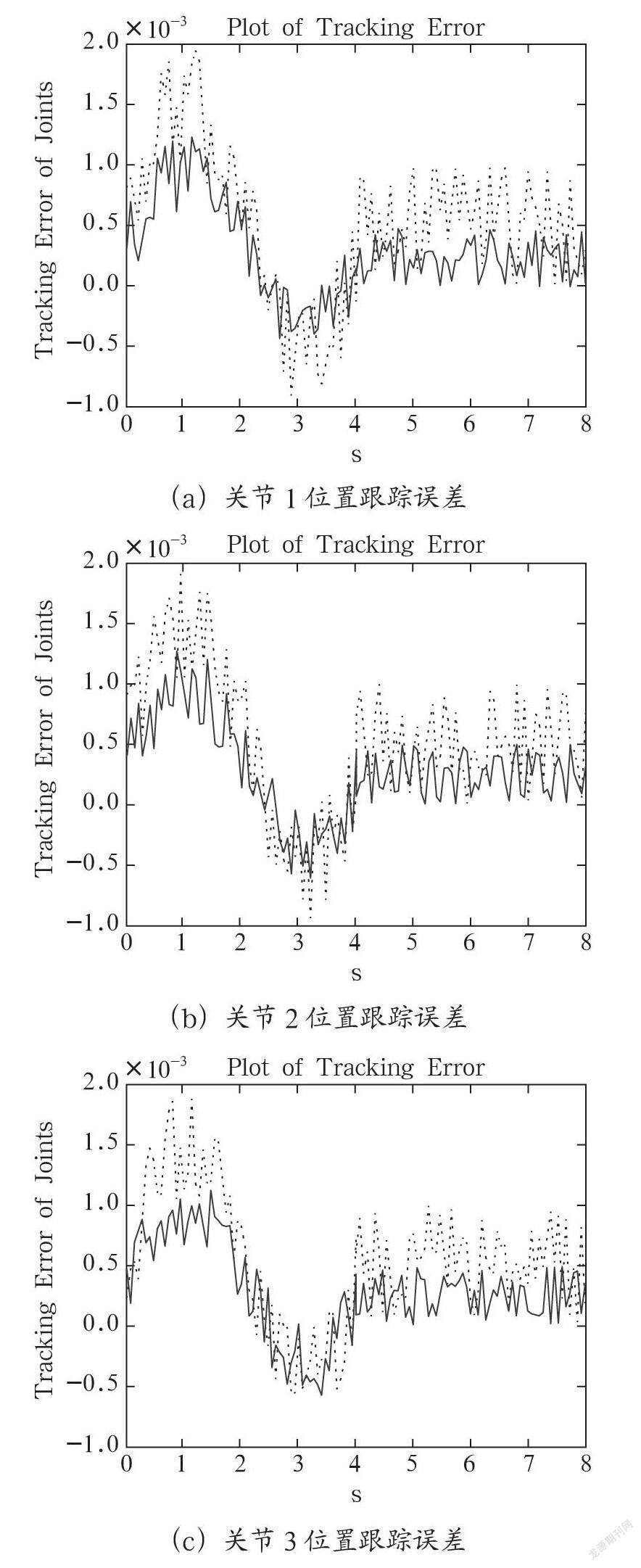
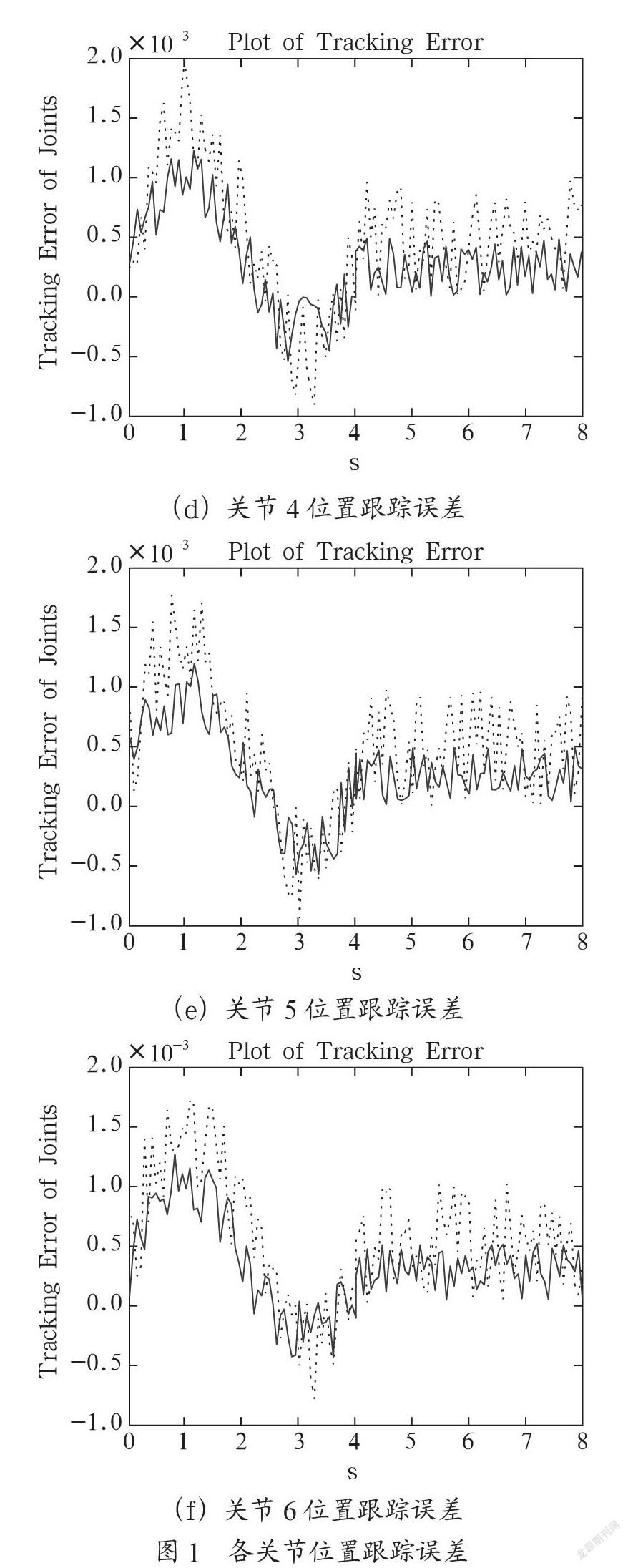
为验证本文所提出的概率模糊支持向量机在线控制算法的有效性,我们将其与传统的支持向量机方法进行比较,并对工业机器人的轨迹跟踪性能进行测试,图1给出了工业机器人对应六个关节(从第一关节至第六关节)的轨迹运动位置跟踪误差。图中虚线和实线分别对应传统的支持向量机方法和概率模糊支持向量机方法的轨迹跟踪误差。
为验证工业机器人的在线相应性能,尽量使各关节以较大的范围工作,运动时间设定为8s,在保证起始点和终点速度,加速度连续的前提条件下进行关节空间的运动根轨迹规划。图1中所示,虚线和实线分别对应传统支持向量机方法和概率模糊支持向量机方法的轨迹跟踪误差。我们可以看到,本文所提出的概率模糊支持向量机方法相比传统支持向量机方法,得到了较好的结果。
3 结 论
本文结合模糊支持向量机理论、概率处理方法和自适应调整机制针对工业机器人系统中存在的模糊信息和随机信息进行有效描述和处理,提出了工业机器人概率模糊支持向量机在线控制模型。再建立在线控制模型数据集,通过离线训练好的模型用于在线的工业机器人控制,得到了较好的结果。实验表明,该方法相比传统支持向量机方法,能够有效改善工业机器人在线轨迹跟踪误差。该方法也而可以进一步扩展到其他支持向量机方法中,应用于机器人控制、模式识别等领域。
参考文献:
[1] 丁学恭.机器人控制研究 [M].杭州:浙江大学出版社,2006.
[2] 蔡自兴.机器人学:第2版 [M].北京:清华大学出版社,2009.
[3] LIU Z,XU S,ZHANG Y,et al. Interval type-2 fuzzy kernel based support vector machine algorithm for scene classification of humanoid robot [J].Soft Computing,2014,18(3):589-606.
[4] XU S,LIU Z,ZHANG Y. Least Squares Support Vector Regression and Interval Type-2 Fuzzy Density Weight for Scene Denoising [J].Soft Computing,2016,20:1459-1470.
[5] 徐淑瓊,袁从贵.一种基于T2FPSO的type-2模糊支持向量机场景分类方法(英文) [J].系统仿真学报,2016,28(12):2925-2932+2938.
[6] LIU Z,XU S,CHEN C L P,et al. A Three-Domain Fuzzy Support Vector Regression for Image Denoising and Experimental Studies [J].IEEE Transactions on Cybernetics,2014,44(4):516-525.
作者简介:徐淑琼(1981.05-),女,汉族,广东揭阳人,博士,副教授,研究方向:工业机器人控制,智能信息处理。
