基于IMC-PID控制的采煤机自动调高系统研究
2019-09-04龙再萌
龙再萌
(上海煤科检测技术有限公司,上海 201401)
由于煤田地质结构复杂,同一区域内煤层厚度及其角度时常发生变化,且地下易出现突发工况,因此以往一直采用的采煤机人工手动调高无论在准确性和安全性上已远远达不到现代采煤工艺的要求。为解决这一问题,采煤机调高系统的自动控制成为了近几十年煤矿机械领域的研究热点。 相较于人工的手动调节,自动调节不光在准确性和安全性上得到了改善,而且在工作效率上有了显著提高。 随着综采工作面的发展,采煤机的自动调高技术是实现综采自动化核心技术之一。
在工业控制中,由于PID控制器的结构简单,易于工程实现的特点,95%的控制系统仍然采用PID控制[1]。但是在采煤机调高系统的建模过程中,液压缸往往被建模为一个积分与二阶环节的组合[2-7],由于积分环节的存在使常规的PID控制器难以对其进行稳定控制。近年来一系列先进控制算法被运用于采煤机调高系统的控制中,赵丽娟等[2]及权国通等[6]采用模糊控制的算法对采煤机进行自动调高控制,改善了系统的抗扰性能;刘智萍[4]及田慕琴等[5]采用预测控制算法对采煤机进行调高控制,缩短了系统的调节时间;王振臣等[7],将遗传算法引入控制器的参数调节,以求找到全局最优的控制器参数。然而,这些控制算法的参数调节较为复杂,要求现场技术人员有较高的专业水平,这便极大限制了其在实际工程中的应用。
针对采煤机调高系统含有积分环节的特点,本文提出了一种易于工程实现且参数调节简便的IMC-PID控制策略以消除其对系统带来的不利影响。
1 采煤机自动调高系统建模
1.1 采煤机自动调高系统组成及工作原理
采煤机自动调高系统主要由调高油缸,电机,液压阀,滚筒,摇臂,位移传感器及控制机构等组成,其原理如图1所示。采煤机自动调高系统工作原理为:当滚筒处于某一位置时,通过位移传感器及A/D模块将该位置信号转化为滚筒的高度信号,并将此高度信号与给定高度进行比较,从而产生偏差信号。偏差信号经IMC-PID控制器、D/A模块及放大器产生控制信号作用于换向阀,从而控制油液流量的出入方向,使调高液压缸的活塞向减小误差的方向移动,即使反馈信号变小,以产生驱动力升降滚筒高度。当滚筒高度达到给定高度时,换向阀阀芯回到中位,在双向液压锁的作用下,使滚筒位置固定。这样,采煤机便完成一次自动调高过程。
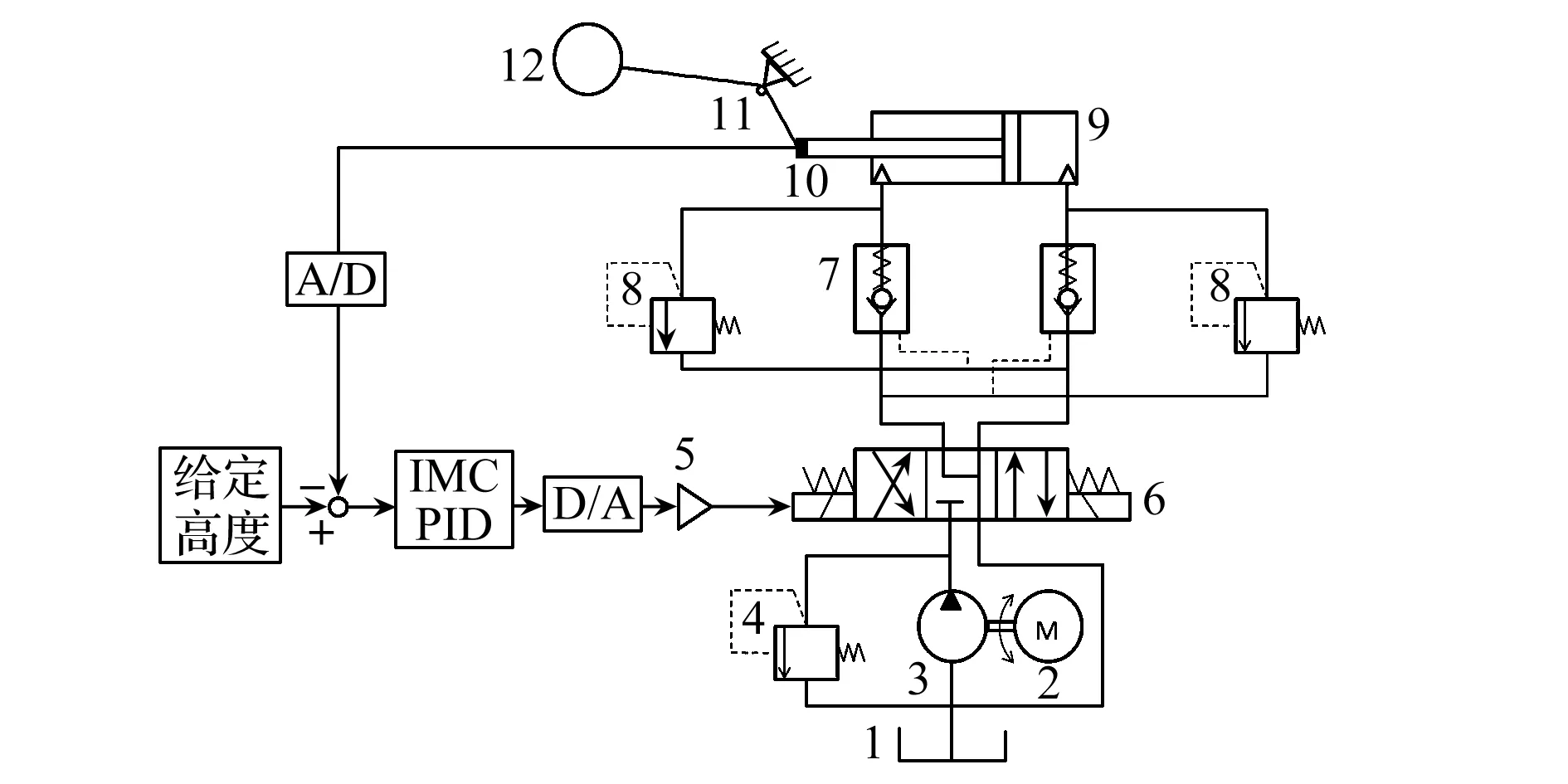
1—油箱;2—电机;3—液压泵;4—安全阀;5—放大器;6—换向阀;7—液压锁;8—过载阀;9—调高液压缸;10—位移传感器;11—摇臂;12—滚筒图1 采煤机调高系统原理图
1.2 系统模型建立
结合图1,采煤机自动调高系统中各个环节传递函数为:
1)放大器。放大器按输入电压成比例地输出电流,并根据比例阀的的控制需求对控制信号进行处理,运算和功率放大,可以看作一个比例环节。其传递函数为:
Ga(S)=Ka
式中,Ka为比例放大系数。
2)换向阀。相较于调高液压缸,比例阀的比例电磁铁响应速度较快,可视作比例环节[9]。其传递函数为:
Gsv(S)=Ksv
式中,Ksv为比例阀增益。
3)调高液压缸。工程上,将忽略弹性负载时的执行元件和被控对象视为一个积分与二阶环节的组合。其传递函数为:
式中,Kh为液压缸的增益;δh为液压缸-负载质量系统的阻尼比;ωh为液压缸负载质量系统的固有频率。
4)位移传感器。调高液压缸活塞的位移量可由位移传感器测得,并传递给控制器两者为比例关系。其传递函数为:
Gf(S)=Kf
式中,Kf为位移传感器的比例系数。
综上所述,采煤机调高系统的传递函数为:
2 IMC-PID控制器设计
2.1 内模控制原理
典型的内模控制结构如图2所示。其中Q(s),Gm(s),C(s)和G(s)分别表示为内模控制器,标称模型,单位反馈控制器和实际被控机构。R(s),E(s),U(s)和Y(s)分别表示为参考信号,系统误差,控制信号和系统输出。
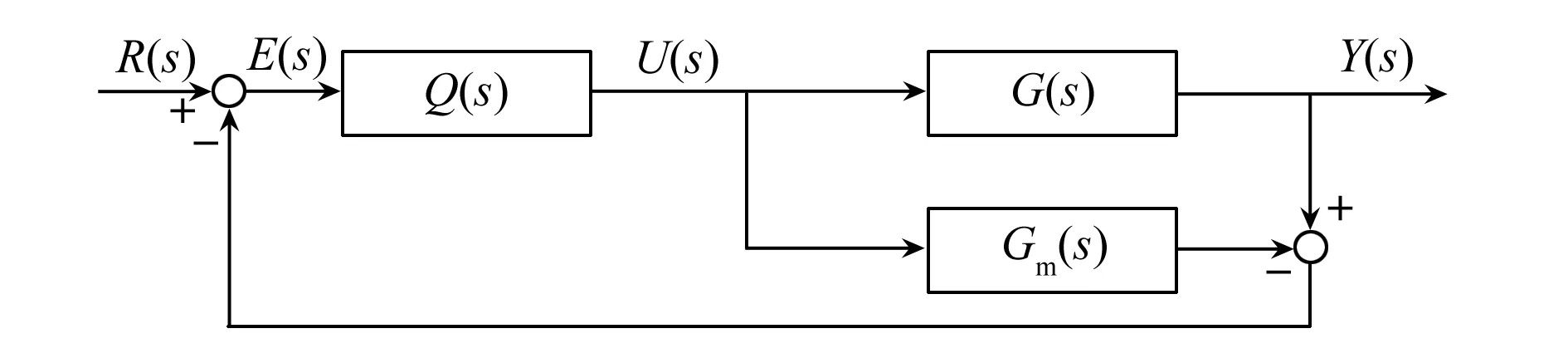
图2 内模控制结构图
由内模控制结构图可知系统参考信号R(s)到系统输出Y(s)的传递函数为:
则系统的输出响应为:
当模型估计准确时,即Gm(s)=G(s),系统的输出响应为:
Y(s)=Gm(s)Q(s)R(s)
(1)
由式(1)易知当取:
系统输出为:
Y(s)=R(s)
则系统能达到理想的信号追踪效果。
当模型Gm(s)为非标称时,系统的误差为:
E(s)=Y(s)-R(s)=
此时只需:
由终值定理可知,系统的稳态误差E(s)趋近于0,这说明系统具有较强的鲁棒性。然而由内模控制所设计出的控制器Q(s)可能在物理上难以实现,通过引入滤波器来解决这一问题。
2.2 系统稳定性条件
结合自动调高系统传递函数及内模控制原理,得到系统传递函数方框图如图3所示。其中C(s)表示为单位反馈控制器。

图3 自动调高系统传递函数方框图
由于积分环节的存在,会导致系统不稳定,这增大了控制器的设计难度。首先需要得出系统内稳定所应具备的条件,系统达到稳定是所有控制器设计的前提条件。
系统输出Y(s),控制信号U(s)和参考信号R(s)之间的传递函数可由图3得到,分别为:
根据图3,将Q(s)定义为:
当模型估计准确时,即Gm(s)=G(s),式(2)可转化为:
Gry(s)=Gm(s)Q(s)
Gru(s)=Q(s)
Guy(s)=(1-KfGm(s)Q(s))Gm(s)
(3)
闭环系统内部稳定的定义为[10]:在控制系统的任意一点输入的有界信号则其在任意另一点均能产生有界响应。 图3所示的系统是内稳定的,当且仅当式(3)中的所有元素都是稳定的,既需要满足以下条件:①Q(s)是稳定的;②当Gm(s)存在不稳定极点时,Q(s)存在相应的零点;③当Gm(s)存在不稳定极点时,1-KfGm(s)Q(s)存在相应的零点;④C(s)在左半平面不存在相互抵消的零极点。
2.3 IMC-PID控制器设计
内模控制器Q(s)的设计是基于H2最优控制问题,由图2可知参考信号R(s)到系统输出Y(s)的传递函数为Gm(s)Q(s),为了提高系统的性能,选择优化函数为:
式中,W(s)为加权函数,Zhang[11]给出了一种简单可行的加权函数选取方案,这里选择W(s)=1/s。为了确保系统渐进地跟踪给定信号,则需要满足以下条件:
由于采煤机模型中存在积分环节,根据限制条件,还须满足:
假设满足条件的Q(s)为:
其中Q1(s)是稳定的。
由式(4)可得需要优化的函数为:
则最优的控制器为:
由于最有控制器Qopt(s)在物理上难以实现,为此引入滤波器:
根据式(5)可得:β=4λ
系统的IMC-PID控制器为:
其中,λ为非负的性能调节参数。
3 系统仿真及分析
采煤机的调高液压系统的相关参数见表1。

表1 系统基本参数
其传递函数为:
取调节参数λ=1,IMC-PID控制器为:
将所设计的控制器与常规PID控制器进行对比,常规PID控制器三个调节参数分别为Kp=101.660,KI=120.208,KD=-268.352。系统的输出响应曲线如图4所示,由图可知在上升时间相近的情况下,本文给出的IMC-PID控制器相较于常规PID控制器,能使系统产生更小的超调量,并且调节时间更短。这说明在调节系统性能方面本文的控制器要优于常规控制器。针对系统建模可能存在的误差,控制系统的鲁棒性也是需要考虑的一个重要因素,这往往被忽视[2-7],在本仿真中,假设系统实际模型为:
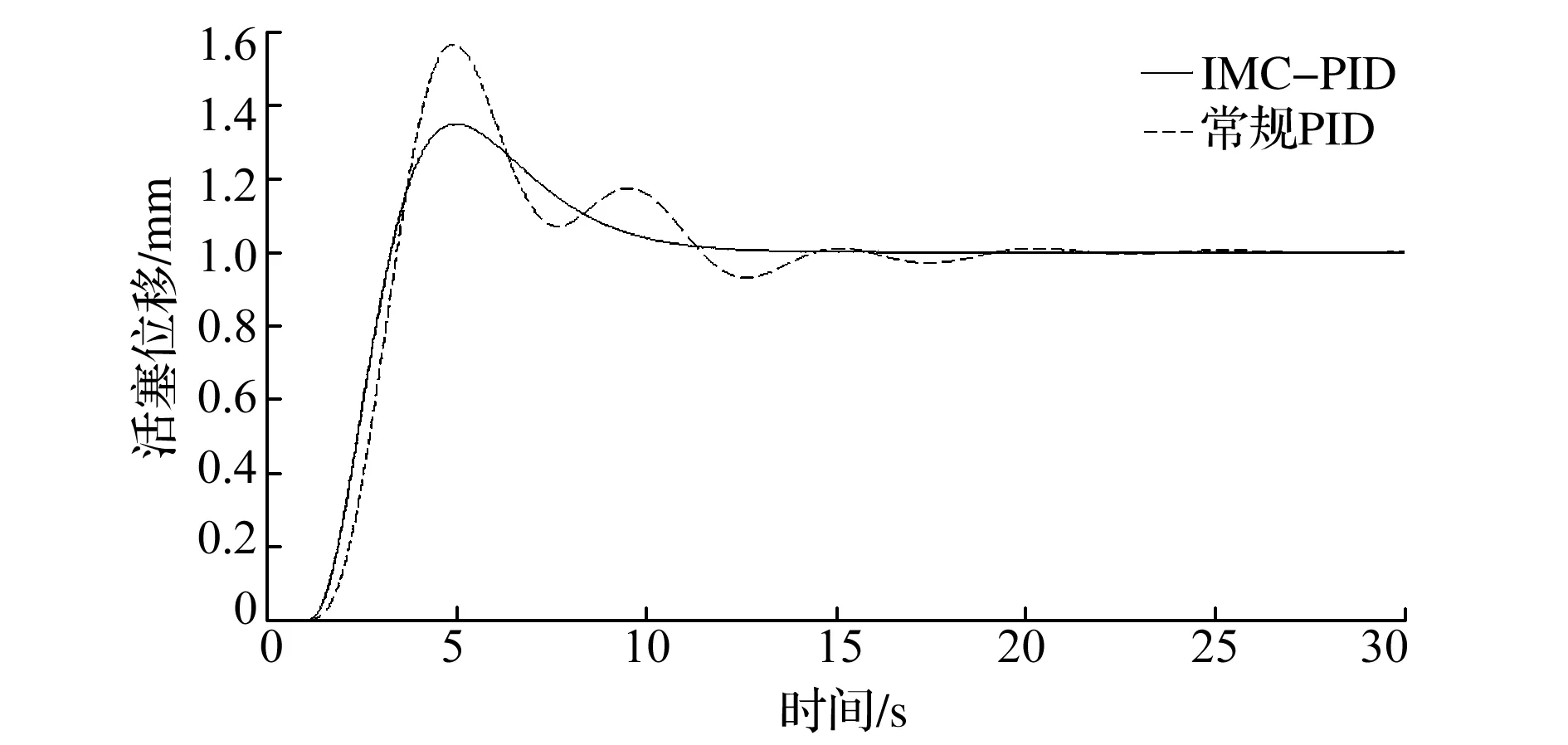
图4 活塞位移响应曲线
控制器参数不变情况下的得到的输出响应曲线如图5所示,由图5可知在系统模型存在误差的情况下,IMC-PID控制器仍能使系统快速达到稳定,而常规PID控制器则使系统产生振荡,因此本文所设计的IMC-PID控制器的鲁棒性要强于常规PID控制器。
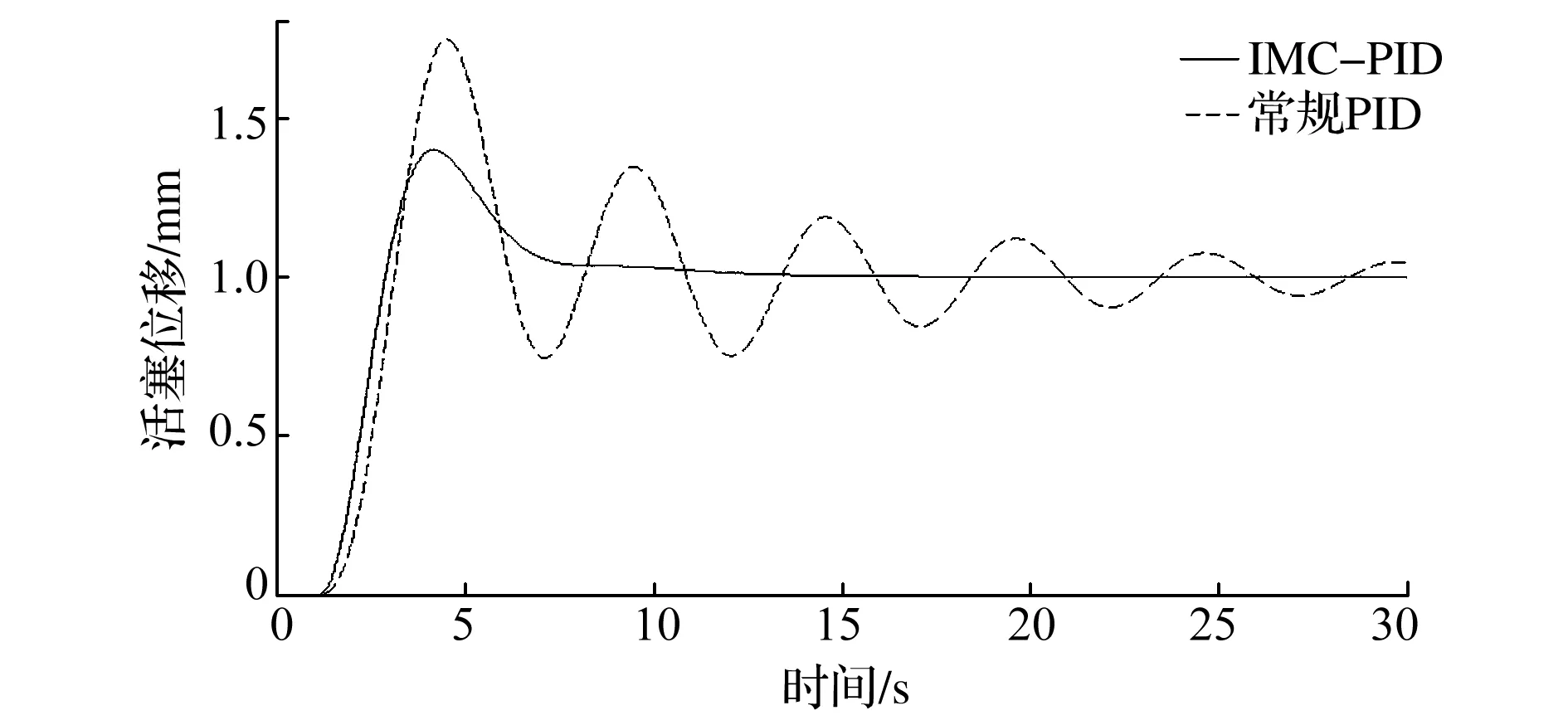
图5 模型误差下活塞位移响应曲线
4 结 语
本文针对采煤机调高系统中存在积分环节导致系统难以控制的特点,提出了一种基于内模控制的PID控制策略。本策略能够使不稳定系统快速,有效,稳定地对参考信号进行跟踪,从而使系统达到理想的工作状态。相较于常规PID控制器的P、I、D三控制参数调节,本文所给出的控制器只需调节单个控制参数λ,这大大降低了调参难度。从仿真结果中可以得出该控制策略在调节系统性能及鲁棒性方面均优于常规PID控制策略。
