半实物仿真档位机构在模拟训练系统中的应用
2019-08-27解志红刘小军游小嘉杨似琼
解志红,赵 刚,刘小军,游小嘉,张 义,杨似琼
(北方自动控制技术研究所,太原030006)
0 引言
部队对模拟训练系统装备在质与量的需求上逐步升级,训练强度也逐步加大,对模拟训练装备的真实度,模拟装备电气化、信息化的要求越来越高[1-2]。目前模拟设备在实训仿真性能真实度和信息化等方面,均已无法满足部队需求。其模训设备只能进行基本操作技能训练,对驾驶员作出简单的动作,既无法感受装备的实际操作性能,也无法感知由于路面、天气、时间等因素对车辆带来的影响,实训真实度差,且由于缺少电气和信息化功能接口,更无法实现与计算机联网及体验视景系统驱动下强烈的沉浸式感知战场环境[3]。如采取实装训练方式,基于装备使用寿命、完好率等要求,无法保证训练时效问题,尤其在生疏地形和极端气候条件下进行驾驶训练的实践机会较少,并且对实装的损耗较大[4]。因此,部队实训中,对高真实度、高信息化程度的新型模拟作训装备的需求迫切。
本文研究的档位机构是各种驾驶舱模拟系统中的重要组成部分,是实现模拟仿真训练的必要装备。本文主要开展了某型模拟档位机构的设计研究,并针对该型模拟训练装置的通用技术要求、训练真实度、装置的应用性,以及模拟动作的具体实现进行分析。
1 模拟训练装置的通用技术要求
模拟训练装置需要复现实际装备的操作特性,实现每一个操作动作与实装的一致性,操作方式、操作力感等需与实际装备保持高度一致,才能实现模拟训练对实际训练的高效仿真[5-7]。该模拟训练装置将每一个动作转化为可测量的电气信号,并使用电信号驱动视景系统,实现操作动作与视景动作的闭环控制。训练装置应占用最小的操作空间,实现模拟档位机构的特有性能。其操作灵活,使用方便,安全可靠等指标也是模拟训练装备必备的技术要求。
1.1 训练真实度的要求
训练真实度是模拟装置的必要条件,需要保证操作力感、操作动作、操作习惯、操作时间等参数必须正确、规范,与实际的装置一致。在操作动作、操作感受实现中,不可能使用实装的机构,必须进行机构转化,既要真实的复现操作动作,又需具备将操作动作转化为可测量参数的条件。
1.2 模拟装置信息化的要求
在整体外形、交互方式与实装保持一致的基础上,模拟装置具有将实际操作动作转变为电气信号的功能,信息实时传递,可以实现电气化与信息化。模拟训练装置的电气化将训练动作转化为可测量的角度信号、位移信号,通过加装电位计、编码器、接近开关、按钮开关等测量器件,将动作转化为电气信号参数输出。在模拟装置中,具备可采集的电气化的参数和输出接口,可以实现模拟装置的信息化和网络化[8]。
2 档位机构的新颖性与应用性分析
2.1 新颖性分析
本文研究的档位机构新颖性强,它通过机械传动和软件处理将档位交变转换为电信号输出,实现了模拟驾驶舱狭小空间内的仿真模拟训练,并实时反应于视景计算机上,达到模拟实装的训练目的。该档位机构在陆军战术对抗仿真及装备效能评估系统模拟器等多型模拟装置中通用[9]。
2.2 创造性分析
该档位机构应用左右、前后两垂直轴的机械联动原理,使驾驶员能够左右移动、前后推拉进行换挡动作训练。该机构在自动档位时具有锁紧功能,通过拉销组合方式进行锁定或解除,打破了调心轴承方式的小范围转动,实现了大范围内的多个档位的交替变换。
2.3 实用性分析
该档位机构适用于模拟训练系统驾驶舱的多种档位模拟机构,档位设置为“川”字分布以8档位为主要研究对象,但是可以通过适当调整实现5档、7档等多功能调节档位的变化,可应用于多种型号的模拟训练系统中[10]。
3 模拟档位机构的设计研究
某型模拟档位机构共有8个档位,分自动挡和手动挡两种操作方式。如何实现操作的真实模拟和高电气化程度难度较大。本文研究的模拟档位机构主要通过对实际装备的功能分割和机构转化,完成模拟档位机构的设计与功能实现。将外观、操作部件与实装保持一致,操作方式、操作力感等参数通过机构转化,实现操作动作复现。机构转化中,既有实际的操作动作,又同时将动作转化为电气信号参数。为了保证战术仿真训练的真实度,模拟装置的操作力感、操作动作、操作习惯、操作时间等参数必须正确、规范,与实际的装置一致。在整体外形、交互方式等与实装保持一致的基础上,实现了信息实时传递,实现对应实装机构的模拟功能。将实际的操作动作转变为电气信号,驱动视景系统完成相应转变,完成训练模拟。
模拟档位机构不仅保持了实际装备的外观特征,还在操作方式上与实装保持高度一致。其操作动作直接反馈为数字信号,不但实现了模拟训练装置的信息化,而且与视景系统进行信息交互,提供了各种地形条件和气候环境,搭建了驾驶员与车辆运动情景的感官交流平台,形成一种人在路上的训练模式,更好地完成了包含车长、炮长等乘员的配合性训练,最终达到仿真训练的目的[11]。
3.1 操作动作一致性的实现
通过对实际装备的功能分割,保留部分操作部件,复现了实际装置的所有操作参数,并将相应的操作参数转化为可以测量的转动角度信号。在模拟机构中,采用将档位操作动作,转变为可测量的转动角度信号;圆柱齿轮与扇形齿弧组成转动副,将档位前后推拉的动作转化为转动动作,转动件与电位计连接,实现动作的电气化转化。将相应的电气信号参数匹配操作动作,从而完成模拟环境下操作训练。
3.1.1外观与操作动作一致性设计
该档位机构操控运动轨迹呈“川”字分布,即“Pt”档置中,自动档位置左,手动档位置右,利用双轴传动、弹簧销定位、拉销锁紧等方式实现了操作手柄沿着左右、前后双自由度的摆动轨迹。如图1~图3所示,实现了手自一体包括D、H、N、R1、R2、Pt、“+”、“-”共8个档位的档位转换。同时,通过按压或松开拉销组合加力板对转轴进行即时解除或锁定,使档位模拟机构在每一个自动档位都能够保持锁定功能,提高了操作的安全性和机构的可靠性。
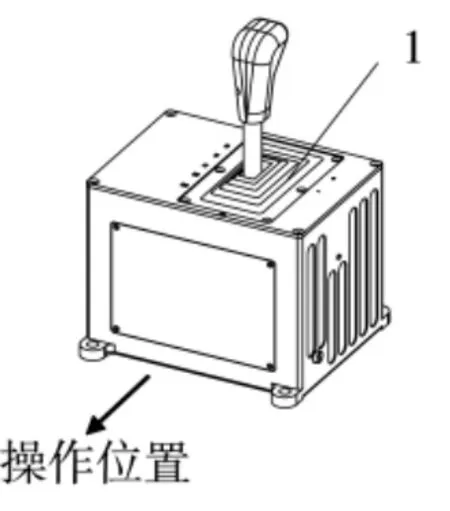
图1 外形示意图1
3.1.2操作机构的转化设计
该档位机构应用左右、前后两垂直轴的机械联动原理,使驾驶员能够左右移动、前后推拉进行换挡动作训练。该机构在自动档位时具有锁紧功能,通过拉销组合方式进行锁定或解除,打破了调心轴承方式的小范围转动,实现了大范围内的多个档位的交替变换。
底座(13)固定于基体(5)底部,左右转轴系(12)通过轴承支撑于底座(13)上。左右转轴(12)满足内环机构(7)的左右转动,即满足驾驶员在自动档区域、手动档区域、Pt档区域之间的切换要求;手柄杆(上)(15)、手柄杆(下)(16)与前后转轴(17)固定。前后转轴(17)的转动性能满足机构在自动档区域的D档、H档、N档、R1档、R2档之间的切换或在手动档区域的“+”“-”档间的切换;前后转轴左侧安装大齿轮(22)和锁定座(18)。大齿轮(22)与其下方小齿轮(23)啮合,小齿轮与电位计同轴固联。手柄转动时带动电位计工作,并采集数据;前后转轴(17)右侧安装有拨销1(8)、拨销2(9);档位板(3)固定于基体(5)上方,档位板上的“川”型区域限定了机构在指定的范围内运动,如图4~图6所示。
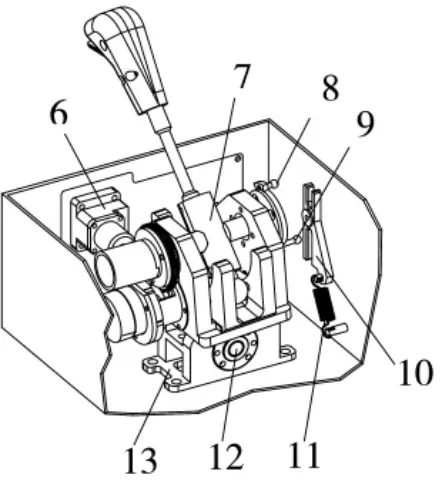
图4 内部组成图
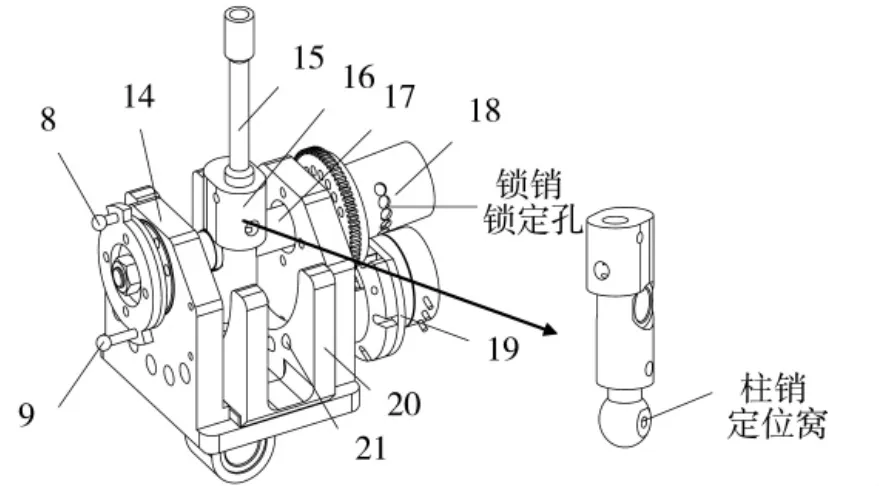
图5 内环机构结构图1
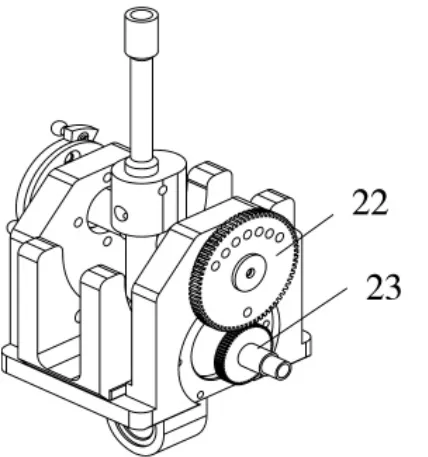
图6 内环机构结构图2
3.2 模拟动作电气化的实现
底座(13)固定于基体(5)底部,左右转轴系(12)通过轴承支撑于底座(13)上。左右转轴(12)满足内环机构(7)的左右转动,即满足驾驶员在自动档区域、手动档区域、Pt档区域之间的切换要求;手柄杆(上)(15)、手柄杆(下)(16)与前后转轴(17)固定。前后转轴(17)的转动性能满足机构在自动档区域的D档、H档、N档、R1档、R2档之间的切换或在手动档区域的“+”“-”档间的切换;前后转轴左侧安装大齿轮(22)和锁定座(18)。大齿轮(22)与其下方小齿轮(23)啮合,小齿轮与电位计同轴固联。手柄转动时带动电位计工作,并采集数据。
4 模拟档位装置的功能验证
该模拟档位装置的功能验证参照图4~图6作如下叙述:
1)自动档区域内的换挡操作:手握手柄,压下加力板,带动锁销组合内的刹车绳(内)移动,拉动锁销(26)脱离锁定孔;继续用力推拉手柄,待球弹簧柱销(21)头部滑出柱销定位窝时将手柄推拉到所需档位,到位后,球弹簧柱销(21)头随即滑进柱销定位窝内。松开手柄加力板,锁销(26)自动进入相应锁定孔内。
2)切换到Pt档的操作:将手柄置于N档,向右移动手柄,到达中间Pt区域,随即,向后拉动手柄,进入Pt档。
3)切换到手动档的操作:将手柄置于H档,向右移动手柄,到达手动区域,随即,向前推动手柄一次,表示手动“+”档一次,松手,摆杆(10)在拉簧(11)的作用下,自动回位,同时摆杆内的拨销1(8)、拨销2(9)带动档位恢复到手动区域中央,向前继续推动手柄一次,此时,累计“+”档两次,以此类推,或向后拉动手柄进入手动“-”档档位,拉动一次,“-”档一次,以此类推。
5 结论
本文以某型模拟训练用档位机构的设计研究为出发点,分析了模拟训练装置的通用设计要求,在模拟真实度和电气化实现两方面进行半实物仿真模拟系统的研究与研发,并验证了研究的可行性。本研究阐述了该档位机构的详细设计与具体的操作,研究成果对强化部队驾驶员的模拟训练具有重要意义[12]。