防空伺服系统中新型数字化检测方法
2019-08-27杨文光张远高吴红霞
杨文光,张远高,吴红霞,李 静,原 鉴
(北方自动控制技术研究所,太原030006)
0 引言
跟踪伺服系统是防空火控系统的重要分系统,其性能优劣对防空火控系统的综合战技指标有着至关重要的影响。跟踪伺服系统的指标体系较复杂,从对防空火控系统的战技指标影响程度来看,稳定精度、跟踪精度、最大跟踪角速度、最大跟踪角加速度和最小平稳速度这5项指标是跟踪伺服系统的重要指标,对以上5项技术指标的检测,业内也形成了一套成熟的传统检测方法[1-3]。
然而,跟踪伺服系统的传统检测方法也存在着检测设备及检测方法复杂和引入人为读数误差影响测试结果等弊端。比如:在测试稳定精度指标时,需要依托自准直光管与平面反射镜形成的光路,首先自准直光管是一套较为复杂的光学设备,平时需要维护和保养,其次在每次检测前需要调整光路,对于没有经验的操作人员来说调整光路需要耗费大量时间;其次,在检测过程中需要人为读数,检测人员需通过肉眼观察并对比光学分划与十字光斑的位置偏差进行读数,由于这是一个动态过程,十字光斑有时跳动非常快,不同的检测人员读数偏差很大。再如,最小平稳速度指标的传统检测方法也面临同样的弊端,检测人员需要目视激光点迹的运行轨迹人为判定是否平稳,主观因素过大。为此,需要研究一套新型的、便捷的、定量化的测试方法。好在跟踪伺服系统数字化程度的提高,为其重要指标检测方法的数字化、便捷化、定量化改进提供了必要条件[4-6]。
1 重要指标分析
1.1 重要指标特性分析
前文提到跟踪伺服系统有五大重要指标,分别是:稳定精度、跟踪精度、最大跟踪角速度、最大跟踪角加速度和最小平稳速度。就目前的防空火控系统发展趋势而言,弹炮结合式火控系统已经成为主流,也就是说自行式防空系统将逐渐取代阵地式防空系统;就防空火控系统的应用而言,陆军防空部队将更多地参与伴随防空任务,因此,防空火控系统对行进间的跟瞄、打击能力的要求也越来越高。对跟踪伺服系统稳定精度指标的要求也日趋提升,稳定精度是指当载体姿态发生变化时(如角度、速度等),跟踪伺服系统维持原状态的能力与度量,通常为角度或角速度。跟踪伺服系统的稳定精度直接反映防空火控系统在运动过程中对目标保持自动瞄准的能力,直接影响到防空火控系统行进间的射击精度和射击反应时间。
当前,防空火控系统面对的打击目标更多地强调“低、慢、小”特点,目标机动性越来越高,跟踪伺服系统的跟踪能力将扮演更为重要的角色。通常来说,跟踪伺服系统的跟踪精度同最大跟踪角速度、最大跟踪角加速度这3项指标,共同评价防空火控系统的自动跟踪能力。跟踪精度是指跟踪伺服系统在跟踪过程中,目标在大地空间的真实位置同跟踪伺服系统回转中心连线与目标视线即瞄线之间的角误差。跟踪精度直接反映防空火控系统的自动跟踪能力,该项指标的优劣直接影响防空火控系统获取现在点的准确性。最大跟踪角速度和最大跟踪角加速度,是指跟踪伺服系统在满足跟踪精度条件下所能达到的最大角速度或角加速度。一般来说,该项指标应该在跟踪伺服系统保证精度的条件下测得,也是反映防空火控系统跟踪能力的重要指标。
最小平稳速度是指跟踪伺服系统在满足跟踪精度条件下所能达到的最小角速度。该项技术指标更多地强调平稳能力,防空火控系统在自动跟踪工况下,当目标距离较远时,其跟踪角速度非常小,此时跟踪伺服系统不应抖动或爬行,否则会影响CCD成像质量和测距精度。最小平稳速度是影响防空火控系统探测能力的重要技术指标[7-9]。
1.2 重要指标检测原理分析
跟踪伺服系统的有限带宽是产生稳定误差的主要原因,稳定误差会引起瞄线的跳动,因此,检测稳定精度本质就是检测跟踪伺服系统瞄线的跳动量。稳定精度检测原理示意图如图1所示,假设存在一个与跟踪伺服系统刚性固连的反射镜能够直接反应瞄线位置,α角的1/2倍就是跟踪伺服系统稳定误差。
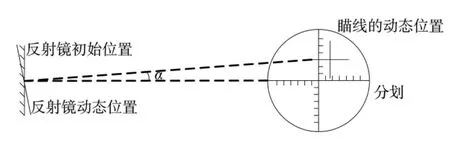
图1 稳定精度检测原理示意图
检测跟踪精度的本质是检测瞄线指向位置和真实目标位置的偏差,如图2所示,在显示跟踪视频中,视场中心可以等效为瞄线的指向,提取目标与视场中心的偏差Δx和Δy,即为跟踪伺服系统跟踪误差。
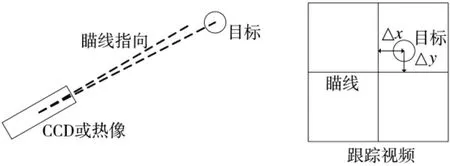
图2 跟踪精度检测原理示意图
最大跟踪角速度的检测是通过计算单位时间内转动的角度来间接获取的,同理,最大跟踪角加速度可以通过计算单位时间内转动的角速度变化来间接获取。前文中提到最小平稳速度应突出其平稳能力,因此,对该项指标的检测着眼点应是平稳。
1.3 重要指标传统检测方法
稳定精度的传统检测方法叫直接光点反射法。如图3所示,首先将跟踪伺服系统固定在三轴摇摆台(或角振动台)上,在跟踪伺服系统上固定一片平面反射镜,在检测前将二者进行初始对准,以便使自准直光管与反射镜准直。然后操纵三轴摇摆台(或角振动台)按专用规范规定的频率和振幅作正弦振动,振动过程中记录自准直光管分划和出射反射镜的光束偏差。
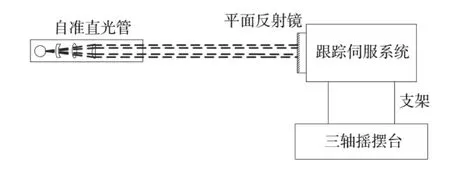
图3 稳定精度检测方法示意图
按式(1)进行数据处理。可得到跟踪伺服系统稳定精度。

式中,σ为瞄准线稳定准确度,单位为毫弧度(mrad);a为方位偏差,单位为毫弧度(mrad);b为俯仰偏差,单位为毫弧度(mrad)。
关于跟踪伺服系统跟踪精度的传统检测方法较多,这里引用偏差提取法,首先将跟踪伺服系统固定在三轴转台上,平台系统进入跟踪模式并跟踪静态目标,启动三轴转台并按专用规范规定的频率和振幅运行,跟踪过程中记录跟踪伺服系统视频输出偏差信息(像素数)。最后对记录的偏差依照式(2)作数据处理。

式中,β为瞄准线跟踪精度,单位为毫弧度(mrad);p为输出偏差,均方根值。
跟踪伺服系统最大跟踪角速度和最大跟踪角加速度的检测方法是,通过伺服控制计算机给稳定平台输入最大角速度或角加速度控制指令,并记录转动角度及转动时间,按式(3)和式(4)计算,其中式(3)用于计算最大跟踪角速度,式(4)用于计算最大跟踪角加速度。


式中,ωmax为最大角速度,单位为度每秒(°/s);εmax为最大角加速度,单位为度每秒平方(°/s2)。αi+、αi-为第i次的正转、反转的转角,单位为度(°);ti+、ti-为第i次的正转、反转的转角对应的时间,单位为秒(s)。
通常情况下,跟踪伺服系统最小平稳速度采用直视法,将被试品的输出轴中心置于试验球幕的球心,激光指示器平稳安装于跟踪伺服系统的输出轴上,激光光点指向半径不小于5 m的球形墙幕。由信号发生器输入技术条件要求的最低角速度信号。系统稳态跟踪后,目视激光点迹,不应有抖动、步进现象。
2 跟踪伺服系统新型数字化检测方法
2.1 跟踪伺服系统传统检测方法的不足
跟踪伺服系统传统检测方法有4点不足之处。首先,测试设备复杂,检测方法不易上手,主要表现在稳定精度的检测方法上,在检测准备阶段不仅需要配备例如自准直光管这样的光学设备,还需要进行光路的初始对准,这个阶段会带来人力和时间的大量耗费。其次,检测方法不便捷,特别是跟踪精度的检测任务周期较长,伴随于分系统调试和全系统联调两个阶段,每次检测都进行一次跟踪伺服系统上下三轴摇摆台的拆装,这样的检测方法非常不便捷。再次,会引入人为读数误差,检测稳定精度和最小平稳速度都需要进行目视,特别是稳定精度的检测是一个动态过程,瞄线的跳动速度很快,这样引入的人为读数误差非常大。最后就是检测严谨程度欠缺,最大跟踪角速度和最大跟踪角加速度的检测前提应是满足跟踪精度,但是传统检测方法未体现需满足跟踪精度这个前提,严格意义上讲,传统检测方法仅表征跟踪伺服的输出能力不能完全表征跟踪能力,此外,最小平稳速度的检测通过人的主观因素判定是否平稳也不够严谨。
随着跟踪伺服系统数字化程度的提高,其内部数据交互大都采用总线式传输,各传感器的信息采集和记录便捷而准确,为跟踪伺服系统开展重要指标的数字化检测方法研究提供了必要条件。跟踪伺服系统的重要指标数字化检测方法将据此展开研究,来提升检测方法的科学性、便捷性、严谨性。
2.2 新型数字化检测方法的原理
对于稳定精度的检测,利用双轴光纤陀螺完成。当跟踪伺服系统在随三轴摇摆台振动时,实时采集双轴光纤陀螺每一瞬时的高低、方位角速度值ωx和ωy,并进行实时梯形数值积分,求出每一瞬时瞄线的高低、方位偏差值:
以上数据的集合构成偏差曲线,如果对偏差曲线利用最小二乘法进行曲线拟合,可以求出漂移曲线,偏差曲线如图4所示。一般来说,两个相邻的波峰和波谷的纵坐标差就是该时刻的稳定精度。
对于跟踪精度的检测,需利用目标真值生成的模拟航路,模拟航路是一组单位时刻对应位置值的集合:

通过对每一时刻模拟航路真实位置和瞄线指向位置作差得到跟踪误差,一般来说,跟踪误差通过系统误差和随机误差两项指标约束。
对于最大跟踪速度和最大跟踪加速度的检测也需要基于模拟航路进行,只是模拟航路对应的真值是一组正弦值,在满足跟踪精度的情况下,检测其最大跟踪速度或最大跟踪角加速度。
最小平稳速度的检测引入低速示性数概念,可提升该项指标的严谨性。低速示性数采用式(5)得到:

式中,η为低速示性数;ωL为最低角速度,单位为度/秒(°/s);n为过“零”的次数;ΔT为采样周期,s;R(i)为第i个时刻跟踪伺服系统接收输入量的二进制码值,bit;C(i)为第i个时刻跟踪伺服系统的输出量二进制码值,bit;
可见,当跟踪伺服系统按最小速度进行自动跟踪时,如果运行非常平稳,其低速示性数会趋于零,而平稳性不理想时,低速示性数会变得很大。
2.3 新型数字化检测方法
2.3.1稳定精度数字化检测方法
首先,将跟踪伺服系统进行稳定回路标定;其次,跟踪伺服系统固定在三轴摇摆台上,按专用规范的频率和振幅作正弦振动,同时通过通用总线采集设备,采集来自跟踪伺服系统的稳定回路解调滤波级输出数据,将来自俯仰通道的数据记为ωx,来自方位通道的数据记为ωy,同时记录俯仰角数据为θf。
然后,按照式(6)~式(8)进行数据处理。
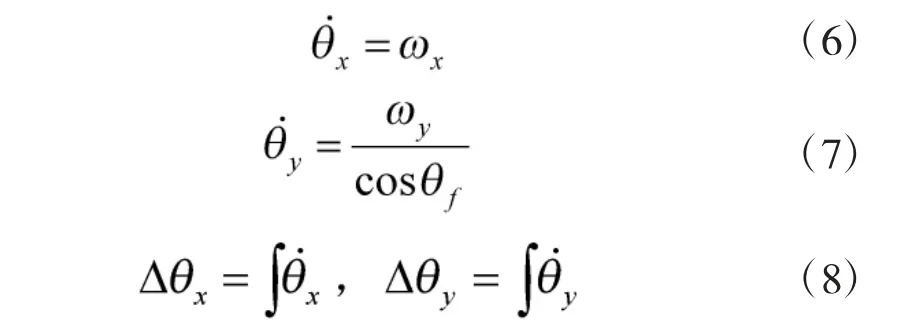
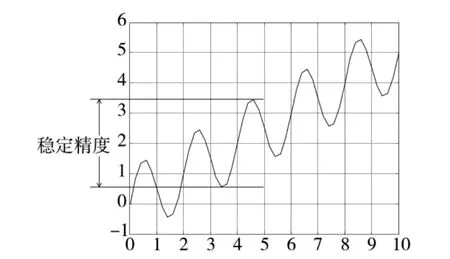
图5 稳定精度测试曲线示意图
可以看出,相对传统检测方法来说,操作步骤大大简化;所有数据采用曲线方式输出,更加直观和精准。
2.3.2跟踪精度数字化检测方法
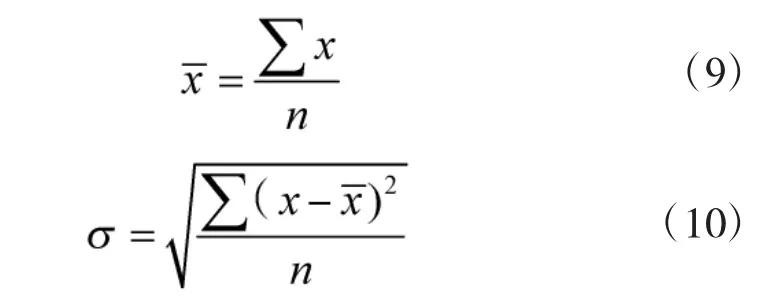
跟踪精度检测采用模拟航路检测法。通过模拟航路的真值,同跟踪伺服系统的位置量做差处理得到取差量Δx、Δy,并将该取差量Δx、Δy传递给跟踪伺服系统,实现模拟航路跟踪。其步骤如下:首先,将跟踪伺服系统的自动跟踪回路进行标定,然后依据模拟航路进行自动跟踪,在模拟跟踪的过程中利用通用总线采集设备,采集来自跟踪伺服系统的跟踪回路取差量输出Δx、Δy,通过对全航路取差量Δx、Δy的过航前部分进行数据处理得到跟踪精度,进行均值处理后的值作为跟踪精度的系统误差,如式(9),进行均方差处理后的值作为跟踪精度的随机误差σ,如式(10)。
2.3.3最大跟踪角速度及角加速度数字化检测方法
由于跟踪伺服系统的最大角速度和角加速度指标要求越来越高,对有限角的跟踪伺服系统来说,倘若给定恒定速度或加速度,有可能出现未达到最大速度或最大加速度转台就已到限位的情况。因此,本技术指标的检测方法较传统检测方法变化较大。跟踪伺服系统的最大跟踪角速度和最大跟踪角加速度这两项指标检测方法相同,其检测原理及方法如下:

2.3.4最小平稳速度数字化检测方法
最小平稳速度测试步骤如下,由操作控制台输入技术条件要求的ωL(最低角速度)信号,当跟踪伺服系统稳态跟踪后,由通用总线采集设备采集速度输出数据;依据式(5)计算系统低速示性数,并进行数据处理。
3 检测数据对比
对传统检测方法和新型数字化检测方法进行了对比检测。首先利用新型数字化检测方法和传统检测方法对稳定精度指标进行了3次测试,测试结果见表1。可见,传统检测方式由于是人为读数,数据较离散,新型数字化检测方法获取的数据更精准,同时能够提升分辨率,按照自准直光管的刻度读数,其分辨率仅能达到0.1 mil,而新型数字化检测方法数据分辨率至少可达0.01 mil,表中数据最后一位有效数字是估计值。
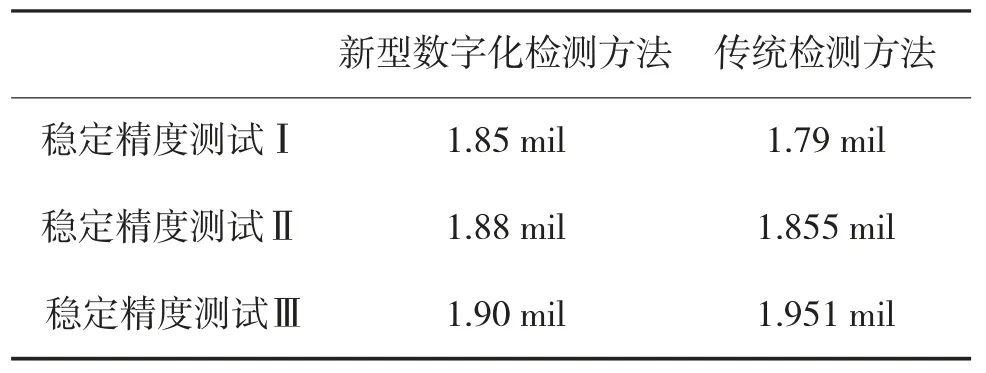
表1 稳定精度测试数据对比
表2给出了跟踪伺服系统跟踪3条不同航路的测试结果对比。从表2的数据可以看出,对于不同的3条航路,两种方法检测结果趋势一致;然而新型数字化检测方法的检测结果由系统误差(均值)和随机误差(均方差)两部分约束,更加严谨、科学。
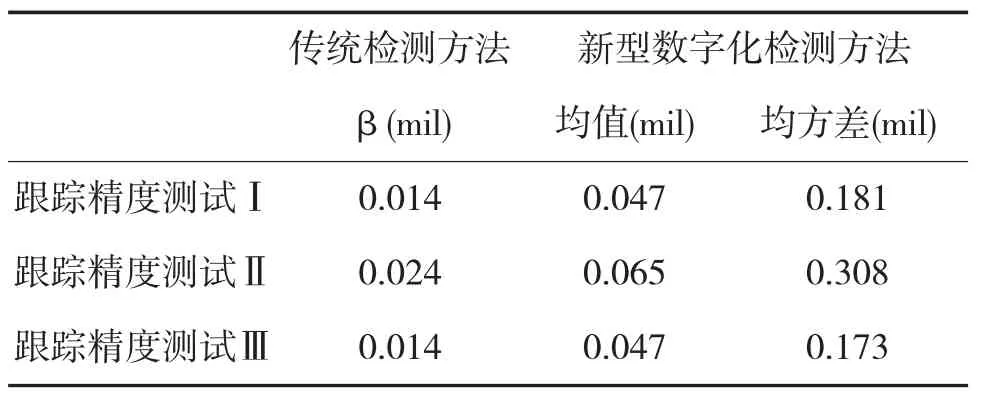
表2 跟踪精度测试数据对比
最大跟踪角速度和最大跟踪角加速度,新型数字检测方法的检测结果不仅应给出最大跟踪角速度或最大跟踪角加速度的检测数值,还应给出该数值对应的跟踪精度,这样更加严谨,测试数据对比情况可参见下页表3。
对最小平稳速度进行了两次检测,其结果即低速示性数数据参见表4。可以看出两次检测结果第1次的平稳性要优于第2次。可见,新型数字化检测方法较人为目视法更为严谨。
4 结论
新型数字化检测方法的提出立足点是跟踪伺服系统数字化程度的提高。依托跟踪伺服系统内部信息采用总线传输方式,新型数字化检测方法完全采用数字化方式实现,较传统检测方法能够省去繁杂的专用测试设备,便于上手,大大提升了重要指标的检测科学性、便捷性和严谨性。但是,新型数字化检测方法存在一定应用场合的约束,首先必须针对数字化跟踪伺服系统,对于模拟跟踪伺服系统还应采用传统检测方法;其次新型数字化检测方法需要对传感器输出和模拟航路进行初始标定。
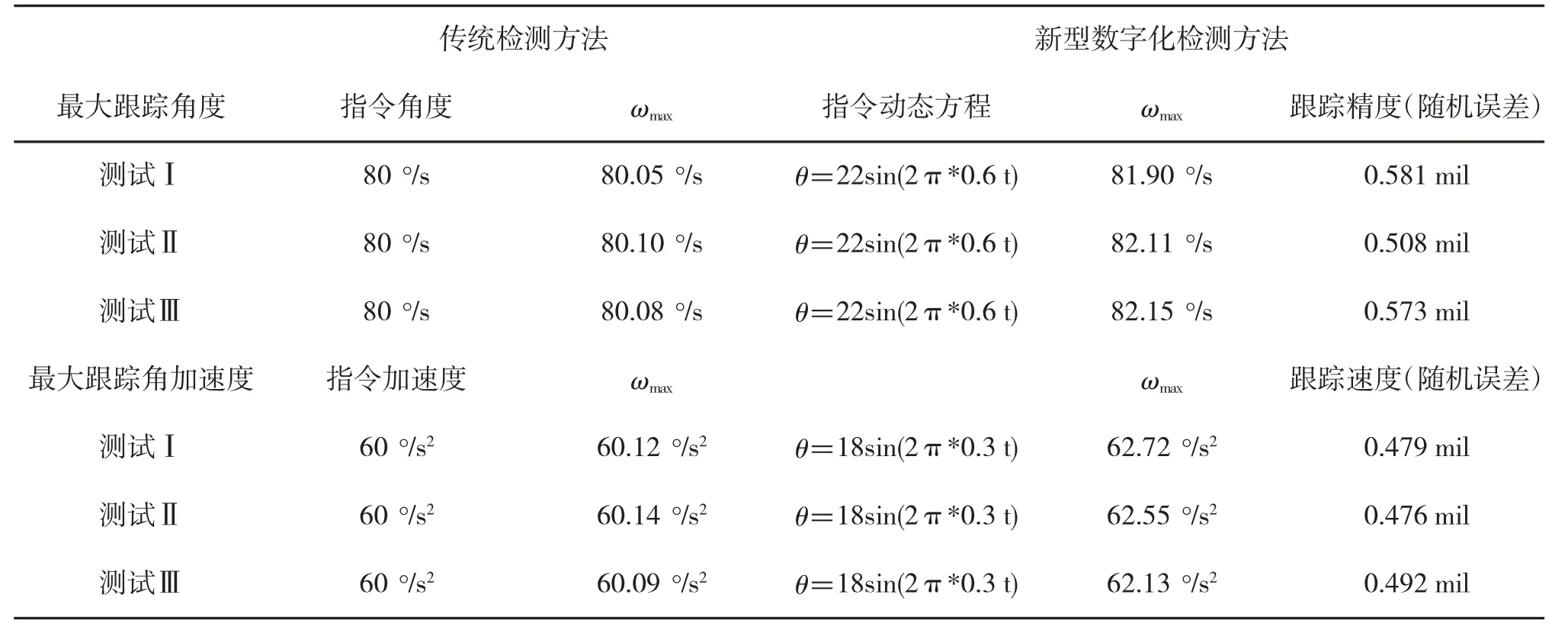
表3 最大跟踪角速度和最大跟踪角加速度数据对比
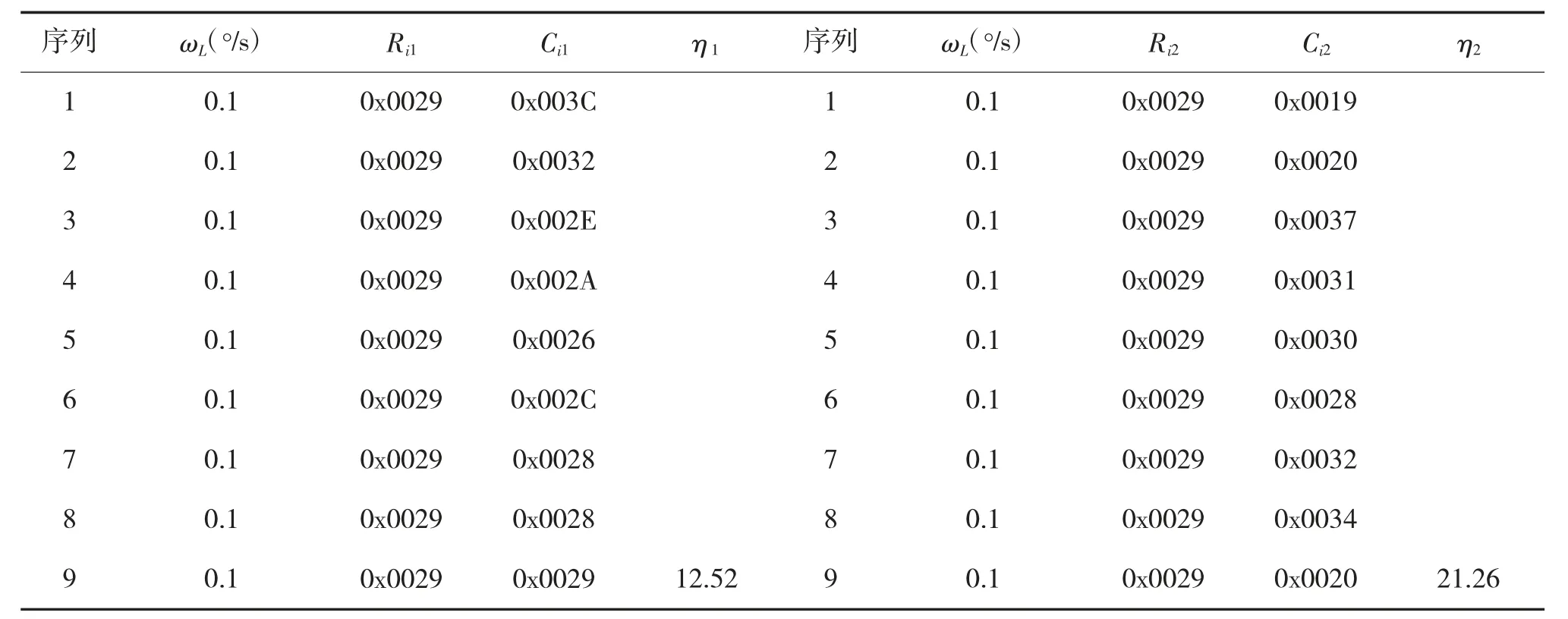
表4 最小平稳速度检测数据
基于新型数字化检测方法的研究,后续还可以通过编程的方式,实现从数据采集到检测结果的全自动输出,能够提升重要指标检测的自动化程度。提升重要指标检测的自动化程度将是未来的一个研究方向。