基于PLC的果蔬机器人抓取控制系统研究
2019-08-07敖茂尧
敖茂尧
(广西职业技术学院,南宁 530226)
1 引言
果蔬作为农业生产中最为重要的经济作物,在其生长与收获过程中耗费了大量的人力物力,尤其在果蔬的采摘环节,是最消耗人力和时间的一个环节。随着我国城市化的发展,农村劳动力人口大幅度缩减,果蔬的生产成本不断增加,如何提高果蔬的收获效率是需要重点关注的问题。当前农业生产已经朝着机械化、智能化、精准化发展,机器人在农业上的应用成为当前研究的热点,果蔬机器人是集电子技术、智能技术、机械工程、计算机工程、农业科学与生物科学等为一体的智能装备,主要针对水果与蔬菜的采摘、搬运、分拣、码垛、打包等方面的作业任务。由于果蔬机器人的研究还处于初始阶段,存在目标识别不准、定位精度不高、抓取不稳定等问题,其中抓取采摘是其关键环节,影响到果蔬果实的获取效率,为此,本文针对果蔬机器人的抓取控制系统进行研究,对于提高果蔬的采摘效率,加快机器人在农业生产中的应用具有重要的意义[1]。
2 机器人抓取关键技术应用分析
2.1 PLC在机器人中的应用
PLC称之为可编程逻辑控制器,具有操作方式简单、程序编写直观、控制方式多样、定位精度准确等特点。PLC常应用于机器人的开关量控制、变频控制、运动轨迹控制等方面,具体来讲,一是利用PLC控制机器人的开关量,这种方式可以同时控制上万个开关,不仅控制方式灵活多样,而且节省工业生产中大量的人力物力,工作效率高;二是采用PLC技术对机器人电机进行变频控制,实现对电动机速度的精确调整,使得机器人控制更加稳定;三是PLC技术对机器人运动轨迹的控制,PLC通过运动控制算法指挥机器人进行各种运动,包括点位运动、直线运动、圆弧运动等,具有良好的定位误差与控制精度[2]。
2.2 总线在机器人中的应用
总线是连接工业生产中各个部件或装置的信号线,信号按照规定的协议与标准进行传输,信号传输的速度、位宽与频率是保障设备正常运行的关键因素。在工业生产中常见有 PROFIBUS-DP总线、CAN总线、SERCOS总线等,在机器人控制系统中,总线发挥着重要的作用,首先在系统上电时加载机器人控制程序,通过PLC和控制总线将逻辑指令发送到I/O设备,同时机器人控制程序将转换为G代码,并通过插补运算计算出目标的具体数据,然后通过控制总线传输各个轴控制器之间的通讯,最终完成机器人各个轴的运动控制。
2.3 机械手在机器人中的应用
机械手是机器人的机械结构本体,主要按照给定的轨迹进行运动,完成目标抓取,并搬运到预定位置。常见的机械手有直角坐标式、圆柱坐标式、球坐标式、关节式等四种类型,其中直角坐标式可以按照+X、+Y、+Z、-X、-Y、-Z 六个方向运动,适合传送带配合使用或目标位置排列有序的工作环境,作业范围较小;圆柱坐标式结构简单、占用空间小、动作范围较大,可在固定的空间范围内进行回转运动或者直线运动,适合于搬运;球坐标式自由度较高,可进行2个旋转运作和1个直线运动,能够根据目标位置选择合适的路径,动作效率高,范围大;关节式具有人手一样的关节,可以实现多个角度的运动,可根据需求调整关节数量以改变自由度,灵活度高,用途广泛[3]。
3 果蔬机器人抓取控制系统设计
在本设计中,果蔬机器人抓取控制系统由硬件与软件两部分构成,其中硬件主要由总线接收PLC控制信号,驱动机器人电动机工作,建立与外围I/O数据通讯;软件主要由PLC读取机器人控制逻辑程序,并进行语言翻译、转换、逻辑处理,最终进行运动控制[4]。
3.1 果蔬机器人抓取硬件控制系统设计
3.1.1 机械手选取 根据果蔬的生长环境及果实形状特征,需要机械手具备旋转运动和直线运动功能,能够实现伸缩、转动、垂直六个自由度的运行,为此,选择上下升降与平面转动相结合的结构,其中,升降工作行程为0~1200mm,转动由PLC驱动电动机带动轴承进行0~270°旋转;前端采用气动手抓,由PLC控制电磁阀驱动气缸完成对果实的抓取。
3.1.2 果蔬机器人硬件结构设计 根据果蔬机器人抓取作业要求,需要满足六个自由度的协调控制,具有良好人机交互界面,能够进行示教与路径规划,系统运行实时性高、响应速度快、可靠性高,为此,笔者依据上述要求设计了如图1所示的果蔬机器人硬件结构示意图。
图1中果蔬机器人控制系统的核心是FAM3PLC,具有功能强、性能好、速度快、易扩展等优点,能够驱动电机、示教和控制外部I/O等功能,模块化的结构便于不同功能的组合应用,设计中采用了电源模块、CPU模块、AC模块、AD模块、位置控制模块和通信模块等。其中位置控制模块根据CPU的命令与编码器反馈之间差值生成轨迹,再以脉冲量的方式输出位置命令,电动机根据脉冲的数量进行位置的移动,根据脉冲的频率进行速度的调整,最后编码器根据电动机的旋转角度计算出移动距离,并将其反馈到位置控制模块,形成闭环控制。
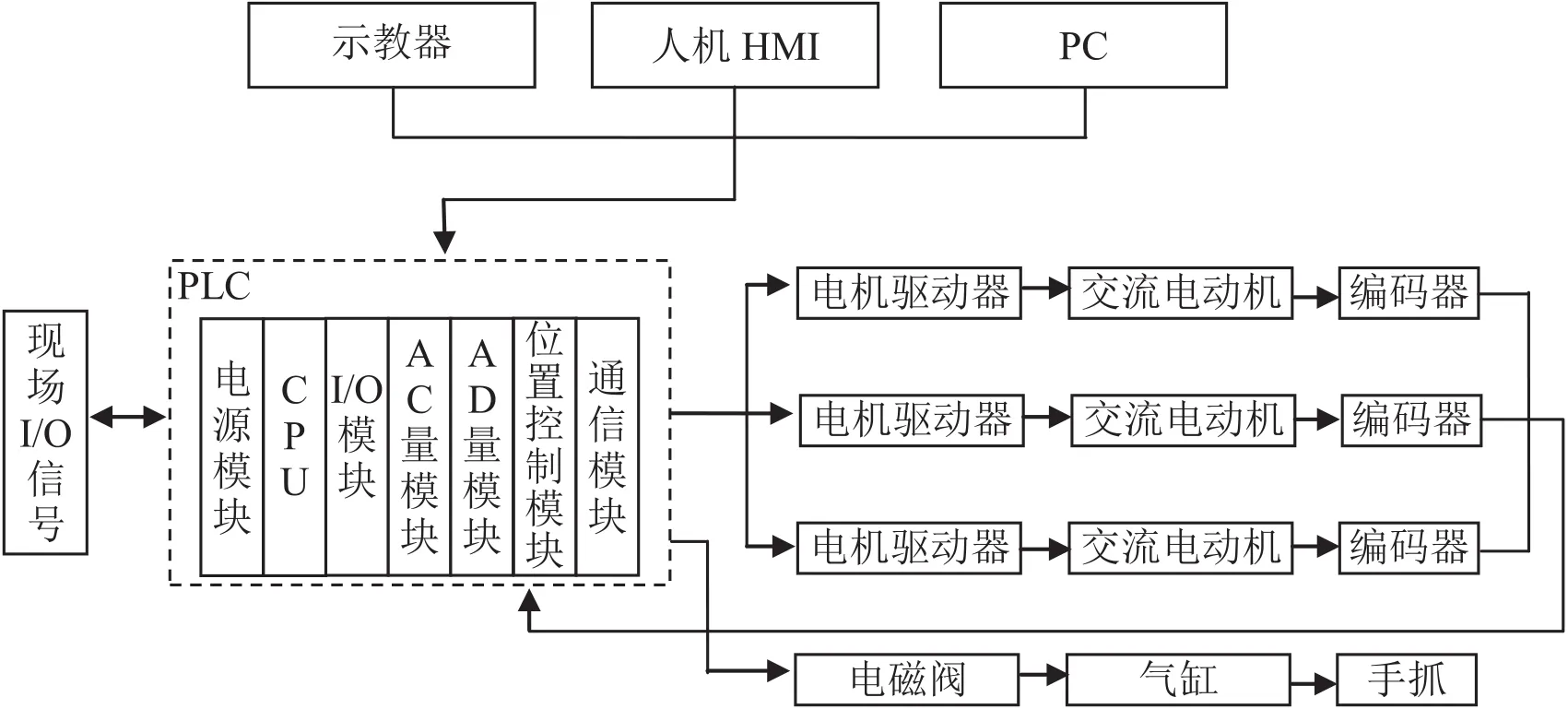
图1 果蔬机器人硬件结构图
3.2 果蔬机器人抓取软件控制系统设计
3.2.1 果蔬机器人软件结构设计 果蔬机器人抓取控制系统的软件设计是保障抓取功能实现与作业效果的关键因素,笔者设计的软件构架如图2所示,包括触摸屏与PLC两部分功能设计。触摸屏作为人机交互平台,由示教模块、监控模块、文档模块、参数设置模块构成,其中示教模块可以进行机器人位置示教,生成指令文件;监控模块对机器人工作状态进行监测与控制;文档模块能够调用、复制、删除和管理文件;参数设置模块可以对机器人控制参数、结构参数和控制系统I/O进行设置管理[5]。

图2 果蔬采摘机器人软件构架图
PLC作为果蔬机器人的核心控制软件,由位置控制模块、速度控制模块、轨迹控制模块、初始点设置模块等构成,其中位置控制模块可以进行插补、定位过程中目标位置的调整;速度控制模块能够调节机器人抓取过程中的速度快慢;轨迹控制模块可根据目标位置进行插补运算,并给出优化后的运动轨迹;初始点设置模块用于机器人原点的设置与恢复。
3.2.2 抓取控制程序流程设计 果蔬机器人抓取工作时动作顺序:初始位置(手指松开、手抓上端、大臂垂直、小臂水平平行)→大臂旋转180°(果蔬位置上方)→小臂伸出→手抓下降→手指夹紧→手抓上升→小臂缩回→大臂反向旋转180°(果蔬放置位置)→小臂伸出→手抓下降→手指松开→手抓上升→小臂缩回(初始位置)。机器人在完成一个循环后,自动回到初始位置继续进行下一次抓取,程序流程图如图3所示。

图3 抓取控制程序流程图
4 小结
综上所述,将PLC应用于果蔬机器人的抓取控制中,具有易编程、系统稳定、操作简单等特点,为农业的现代化发展带来了便利,随着我国传统农业向智能农业的升级改造,机器人技术的发展必将成为影响其转型升级的关键因素,因此本文设计的果蔬机器人抓取控制系统将对于未来农业机器人的应用具有重要的意义与价值。
