高光谱图像序列中的运动弱小目标检测*
2019-08-06王津申王清峰
王津申,李 阳,王清峰,鲜 宁
(1.北京航空航天大学 宇航学院·北京·100083; 2.上海航天控制技术研究所·上海·201109;3.北京航空航天大学 科学技术研究院·北京·100083)
0 引 言
近年来,人工智能在航天器控制领域得到了广泛的应用[1],其中使用人工智能处理遥感图像已成为一种非常常见的方法。弱小运动目标检测在军事和民用领域中的应用得到了研究人员的广泛关注。在遥感图像的军事应用中,目标虽然弱小,但对感兴趣的目标进行检测和跟踪是必要的。然而,由于复杂的背景、噪声杂波和长距离传输后的信号衰减等原因,感兴趣的目标的信噪比往往很低。基于以上原因,我们很难从单一宽波段红外图像序列中获得足够清晰的运动目标的检测结果[2]。
随着高光谱传感器的发展,高光谱图像已经被应用于处理许多经典的图像问题。高光谱传感器能够同时在空间域和频谱域获取高分辨率信息,这是高光谱传感器相对于单一宽波段红外传感器的重要优势。高光谱图像在目标检测领域已经取得了大量的研究成果。目标检测的任务是在高光谱数据立方体的像素中搜索特定目标,该目标的大小往往只有几个像素,在背景杂波中仅占据了搜索区域很小的一部分。在给定一个统计模型的情况下,大多数经典算法均是使用Niemann-Pearson准则来解决检测问题,并在这一过程中使用广义似然比检验(Generalized Likelihood Ratio Test, GLRT)来推导检验的统计量。在某些情况下,产生的误报概率不依赖于任何未知参数。该特性通常被称为恒虚警率(Constant False Alarm Rate, CFAR),其在自动目标检测系统中非常重要。
在已知目标光谱特征的前提下,一种匹配滤波算法通过计算潜在目标的最高信噪比来检测目标[3]。然而,它不适用于目标光谱特征未知的情况。另一种常见的检测方法被称为异常检测[4],它可以在没有先验知识的情况下检测出与其背景环境在光谱上显著不同的部分。由Reed和Xiao li提出的RX算法[5]被认为是高光谱图像异常检测算法的基准。目前,大多数高光谱检测算法都侧重于使用单帧图像,主要利用图像的光谱信息检测感兴趣的目标。然而,为了检测杂波背景下的低信噪比运动目标,单纯的光谱信息是不够的,时间信息是通过降低背景杂波来提高低信噪比、增强运动目标检测性能的关键。
本文提出了一种基于空时联合异常检测的高光谱图像弱小运动目标的检测方法。首先,利用经典的异常检测方法计算空间异常图,即利用RX算法[5]提取高光谱图像中的空间异常信息;然后,根据图像序列中相邻帧背景相似的特性,计算时域异常图。此外,根据目标在图像序列中的运动一致性,计算轨迹预测图;最后,将上述的空间异常图、时域异常图和轨迹预测图进行融合,得到目标的最终检测图。
1 高光谱图像
高光谱图像包含几十个光谱波段,如可见光波段(0.39μm ~0.7μm)、中波红外辐射(MWIR:3μm~5μm)和长波红外辐射(LWIR:8μm~12μm)。本文中使用的高光谱图像序列是通过高光谱相机拍摄而得的。该相机包含可见光和短波红外光,光谱范围为0.68μm ~0.96μm,相邻光谱间的间隔约为10nm[6]。由高光谱传感器生成的图像被称为高光谱数据立方体,每个立方体包含25个波段,由高光谱相机在整个光谱范围内生成25幅图像,如图1所示。

图1 高光谱数据立方体的生成过程Fig.1 The generation process of hyperspectral image cube
高光谱传感器产生的高光谱图像数据量通常是普通红外图像的几倍,这对图像分析系统在图像传输、存储和计算等方面的能力提出了挑战。为了解决这些问题,必须对高光谱图像进行降维处理,以减少数据量。在本文中,使用主成分分析(Prin-cipal Component Analysis, PCA)[7]法来减少高光谱数据的维数。在高光谱图像处理过程中,PCA不仅可以降低图像数据的维数,而且可以对图像进行简单的降噪处理。此外,PCA可将原始图像信息按照协方差矩阵的特征值大小依次排列,即大特征值所对应的前面几个分量包含了绝大部分有意义的图像信息数据。因此,PCA的前面几个分量可被看作是原始高光谱图像数据的特征。
假设每个输入的高光谱数据立方体由L个波段组成,且高光谱图像的每个波段Ii(i=1,2,…,L)具有相同的大小(m×n),那么整个高光谱立方体可以表示为I=[I1,I2,…,IL],其尺寸为m×n×L。PCA的目的是将数据立方体的波段数由L降至k,并生成1个特征矩阵PC(x,y,k),其尺寸为m×n×k,如图2所示。其中,(x,y)指高光谱图像中像素点的坐标。在经PCA处理之后,每个像素(x,y)都有1个1×k的特征向量V。

图2 高光谱数据立方体的PCA降维过程Fig.2 The PCA process of hyperspectral image cube
2 弱小运动目标检测
本节介绍了一种新的空时联合异常检测方法。本方法首先分别计算出了空间异常图、时间异常图和轨迹预测图。然后,将这3张图进行融合,生成最终的空时联合异常图。最后,计算自适应阈值,并根据自适应阈值将目标从背景杂波和噪声杂波中分割出来。
2.1 算法总体流程
本文提出的空时联合异常检测方法的总体架构如图3所示。在图3中,PC(x,y,k,t)、S(x,y,t)、T(x,y,t)、P(x,y,t)、STP(x,y,t)分别表示原高光谱数据立方体的主成分、空间异常图、时域异常图、轨迹预测图、空时联合异常图,如图3所示。该方法通过递归的方式达到了目标检测的目的。
解 如图9所示,将点P受到的5 cm/s的速度用平行四边形法则可分解为向左3 cm/s,向下4 cm/s,而Q有向上4 cm/s的速度.因为M为PQ的中点,所以考虑竖直方向,受到P,Q两个相反方向且相等速度量的影响,M并不会产生上下移动;考虑水平方向,点M有向左1.5 cm/s的速度,所以点M的轨迹为一条线段,起点终点分别为BC,BA的中点.所以点M运动路径为3 cm.

图3 空时联合异常检测方法的流程Fig.3 The work flow of the proposed spatio-temporal anomaly approach
2.2 空间异常图
空间异常图适用于空间奇异性的特征挖掘。由于没有先验知识,对目标的检测是通过寻找与周围背景有很大不同的像素而实现的。RX算法就是其中一种常见的异常检测算法。RX算法可以表示为
(1)

本方法采用RX算法计算空间异常图,寻找空间域上的异常像素。空间异常图S(x,y,t)可被表示为
(2)
式中,Vt为检测像素的特征向量,μt为PC(x,y,k,t)的特征向量均值,Φt为PC(x,y,k,t)的自协方差。
2.3 时域异常图
时域异常图适用于时间域奇异性的特征挖掘。假设前一帧的背景样本在当前帧中保持不变,从而建立非常准确的时域背景估计。类似于空间异常图,时域异常图可被表示为
(3)
式中,Vt+1为检测像素的特征向量,μt+1为PC(x,y,k,t+1)的特征向量均值。
2.4 轨迹预测图
为了检测目标在图像序列中的运动特征[8],可引入轨迹预测图,从而更好地提高检测率并降低虚警率。轨迹预测图可表示为

(4)
式中,STP(x,y,t-1)为上一帧的空时联合异常检测图,ζ为计算窗口的大小。
2.5 图像融合过程
为了综合利用高光谱图像序列中的空间特征、时域特征和目标的运动特征,可将上述空间异常图、时域异常图和轨迹预测图融合。首先将空间异常图与时间异常图进行融合
ST(x,y,t)=N(S(x,y,t))N(T(x,y,t))
(5)
式中,N(·)为min-max归一化运算,ST(x,y,t)为空时联合特性。
然后,进一步融合轨迹预测图,最终的空时异常图可表示为
STP(x,y,t)=N(ST(x,y,t)+C)·
N(P(x,y,t)+C)
(6)
式中,N(·)为min-max归一化运算,C为非零常数。在本文中,该常数被设置为1×10-8。设置常数C的目的是保证融合过程中的每个元素都是非零的。
2.6 自适应阈值
最终的空时异常图STP(x,y,t)表明了弱小运动目标与复杂背景之间的内在差异。为了使信杂比最大化,设置自适应阈值[9]如下
Th=μSTP+kσSTP
(7)
式中,μSTP为空时联合异常图STP(x,y,t)的均值,σSTP为空时联合异常图STP(x,y,t)的方差,k为经验常数,在不同的高光谱图像数据集中可设置为不同的值,在本文的后续实验中被设置为10。
3 实验结果
为了检验所提出的弱小运动目标检测方法的性能,本文使用了一个高光谱图像序列数据集。该数据集中的待检测目标为云背景下的飞机目标,包括3段高光谱图像序列、总计超过2000帧的高光谱图像,如图4所示。由于目标尺寸较小,很难区分感兴趣的目标,此外,云背景和随机噪声杂波也增加了目标检测的难度。

(a)高光谱图像中的一个波段

(b)该波段三维映射图4 测试数据集示意图Fig.4 An illustration of the dataset

图5 本文提出的空时联合异常检测方法的实验结果Fig.5 The visual results of the proposed spatio-temporal anomaly approach
在实验中,从原始高光谱图像序列中依次选取关键帧,并对关键帧中的运动目标进行精确的标注,以便进行定量评价。在实验中,PCA将图像维度降至4维,RX算法的窗口尺寸分别设置为10。首先,验证了该方法的有效性。在上述参数设置下,对上述数据集中的所有序列进行了测试,实验结果如图5所示。在测试序列的第1帧,轨迹预测图中的每一个像素均被初始化为1,如图5所示。经过几轮迭代计算之后,空时联合异常图STP(x,y,t)即可准确检测出感兴趣的目标。然后,对本文中的方法的检测率进行了定量分析,绘制了ROC(Receiver Operating Characteristic)曲线,结果如图6所示。ROC曲线是根据不同的阈值,以检测率为纵坐标、以虚警率为横坐标绘制的曲线。ROC曲线与横坐标轴围成的区域的面积越大,目标的识别效果越好。图6(a)显示了空间异常图、时域异常图与空时联合异常图的ROC曲线。图6表明,通过联合利用高光谱图像的空间特性和时间特性,可以显著提高检测率。图6(b)显示了不同PCA降维维数下的ROC曲线。图6表明,增加PCA的维数可以提升检测准确率。
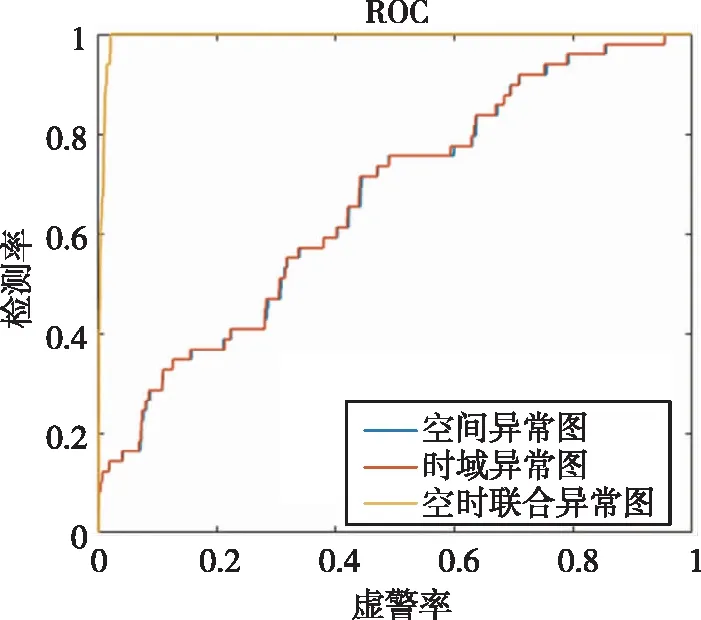
(a)空间异常图、时域异常图与空时联合异常图的ROC曲线

(b)不同PCA降维维数下的ROC曲线图6 本文提出的空时联合异常检测方法的定量分析Fig.6 The quantitative analysis of the proposed spatio-temporal anomaly approach
4 结 论
本文研究了基于高光谱图像序列的目标检测问题,提出了一种新的高光谱图像序列空时异常处理方法。该方法综合考虑了高光谱图像中的空间特征、时域特征和运动特征,通过计算空间异常图、时间异常图和轨迹预测图,得到了目标的检测结果。实验结果表明,该方法具有良好的高光谱弱小运动目标检测性能。在今后的工作中,将继续改进算法,使其可以适应更为复杂的背景。此外,还将尝试将该方法扩展到其他高光谱应用领域,如目标识别、目标跟踪等。
