基于多旋翼无人机平台的大气PM 2.5垂直 结构观测技术
2019-07-16王东生彭仲仁李白李小兵修光利
王东生,彭仲仁,2,李白,李小兵,修光利
(1.上海交通大学 智能交通与无人机应用研究中心,上海 200240;2.佛罗里达大学 适应性规划和设计国际研究中心,美国 佛罗里达 盖恩斯维尔 32611;3.华东理工大学 国家环境保护化工过程环境风险评价与控制重点实验室,上海 200237)
随着我国近年来经济的高速发展,能源消耗逐步增加,大气污染问题渐渐凸显,“PM2.5”、“雾霾”等词语已成为普通民众耳熟能详的词语。研究表明,短期或长期暴露于灰霾天气中,会引发一系列健康危害,包括心血管疾病、呼吸道疾病、平均寿命降低等[1]。因而,解决大气污染问题迫在眉睫。针对我国复合型大气污染的现状[2],区域联防联控成为了污染防治的关键所在[3]。大气污染的垂直结构是理解区域重污染发生、发展及实现区域协同治理的重要前提。目前,传统的地面监测站主要提供了地面的大气污染物信息,对于大气垂直结构的信息获取,则主要依赖于地基激光雷达[4]、多轴差分吸收光谱(MAX-DOAS)[5]等光学遥感手段。这些光学遥感技术不仅可以在固定的站点安装使用,也可以发展为车载系统[6-7],从而实时机动观测。光学遥感技术并非直接观测,污染物浓度等信息仍需反演得出,因而其精度仍依赖于直接观测数据校准。大气垂直结构的直接观测手段包括高塔观测[8]、飞机航测[9-10]、大载荷系留气艇[11]等,这些观测手段获取的数据也可以为光学遥感技术反演污染物浓度提供数据支撑[12]。这些手段或是有着相对较为高昂的实验成本,或是机动性不如车载雷达等方式灵活,使得这些直接观测手段难以被大范围、经常性地使用。因而,为完善大气污染立体观测网络,加深对大气污染垂直结构的理解,需要一种可以广泛应用的大气垂直结构直接观测手段。
无人机作为新的观测工具,已逐渐应用于大气环境观测领域[13-14]。多旋翼无人机可以灵活地在边界层内飞行,实现垂直起降和悬停,相较于载人飞机和系留气艇而言,具有更好的机动性和更为低廉的成本。目前,国内外均已有研究[15-16]基于多旋翼无人机搭载小型传感器,尝试用于城区大气污染观测,但应用范围有限,也缺少与其他观测方式的充分比对和有效校准。本研究旨在设计基于多旋翼无人机的大气污染观测平台,并将其与系留气艇平台比对校准,使其可以广泛推广应用于大气边界层范围的大气垂直结构观测,为激光雷达等观测技术提供用于反演校准的直接观测数据,并为现有的大气污染立体观测网提供有机补充。
1 实验
1.1 无人机平台
智能交通与无人机应用研究中心搭建的无人机观测平台旨在以较低的成本,实现灵活的大气垂直结构探测任务,所以定点悬停和垂直起降的多旋翼无人机无疑是非常合适的设备载机。本平台选用六旋翼的无人机。其动力来源于两块锂聚合物电池,完全充电后空载续航时间为45 min,满载续航时间为30 min,可以执行0~1000 m 高度范围内的大气垂直结构观测任务。该无人机内置了GPS 导航模块,可以准确地获知无人机所处的经纬度和垂直高度,定位精度可以达到0.5 m。该无人机的具体参数见表1。
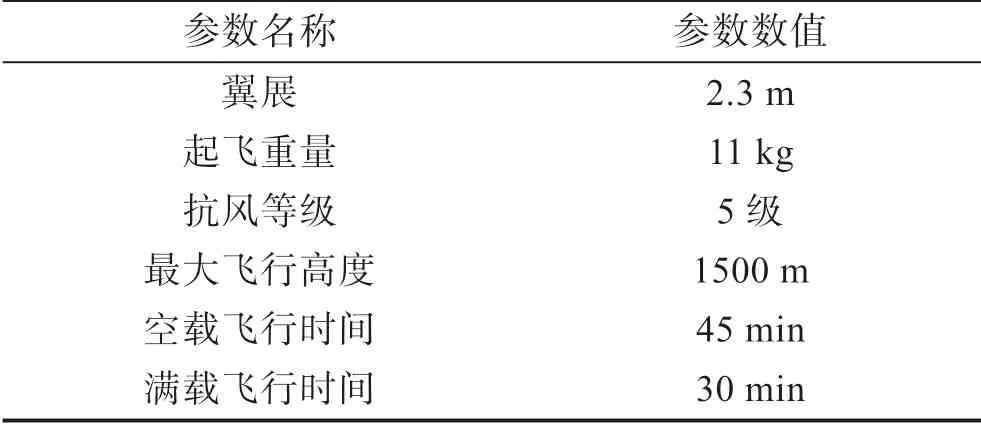
表1 多旋翼无人机平台参数
无人机通过数传电台与配套的地面站进行通信,将飞机航速、飞机位置、电池电量、飞行姿态等信息实时回传至地面站,并由地面站软件显示,从而让实验人员及时获知无人机状况。无人机在执行飞行任务时主要有两种方式:一种是通过飞控手利用遥控器控制无人机加速、减速飞行和悬停;另一种方式是在地面站软件预设航线,按照设定的路线自主飞行。通常而言,预设航线的方式更适合执行实验任务,降低实验人员负担,而飞控手直接控制的方式更多用于应对突发状况,将自主飞行模式切换回手动模式,由经验丰富的飞控手来处理。
1.2 机载设备
无人机平台所搭载的便携式设备主要包括颗粒 物检测仪、黑碳仪、臭氧检测仪、温湿度计等,可以视实验任务需求进行进一步调整。表2 列出了目前无人机平台所集成的主要便携式设备型号和其性能参数。出于保障无人机飞行安全考虑,无人机载设备集成至无人机下方吊舱内部,以降低平台重心。

表2 无人机平台中集成的便携式设备型号及主要性能参数
无人机下方吊舱由碳纤维材料制成,无人机载便携式设备集成至其中,总质量在5 kg 以内,这降低了无人机飞行能耗,从而提高了无人机飞行时间。同时,无人机吊舱体积较小,有助于降低风阻,进一步提高无人机平台的飞行稳定性。吊舱和设备集成有助于快速安装和拆卸,从而提高实验效率。
为了保障大气污染物测量精度,降低无人机本身飞行产生的气流影响,文中所使用的无人机平台在配置泵吸式便携式设备的进气管路时,参考了在其他用于大气污染观测的多旋翼无人机平台的经验[16-17]。将进气口配置于无人机顶部,并将进气管路从顶部延伸至设备所在的吊舱之内。
1.3 地面比对实验
对于所搭建的无人机平台而言,其所采集的数据可靠性首先取决于机载的便携式设备本身。因而,尽管上述设备均经过了出厂检验,在配置于无人机平台之前,仍将便携式设备在地面与常规的大气监测设备进行比对实验。
设备地面比对地点位于上海市奉贤区,与后述高空比对实验同在2017 年冬季进行。所有的便携式设备安置于华东理工大学奉贤校区内,与大载荷系留气艇所装载的监测设备在同一区域。便携式设备被固定于1 m 左右高度的三脚架上,放置于系留气艇放飞场地内。用于比对的数据来自于系留气球任务挂架上挂载的大型监测设备,所有数据均为1 min平均数据。
对于无人机平台冬季重点关注的污染物PM2.5而言,从图2 中可以看出,便携式设备与大型监测设备的线性关系很好,但绝对数值存在差异。无人机载设备的测量数值在校正前偏大,因而所采集的数据需经过线性公式校正后方可使用。根据以往研究经验[18],Sidepak AM520 这类基于光散射测量法的设备的测量 偏差主要来源于灰霾事件、高湿天气、颗粒物组分差异等。在地面比对期间,地面相对湿度在51%~97%之间,PM2.5浓度大致在0~200 μg/m3之间,基本覆盖了重污染和高湿度的情形。在此种情形下,便携式设备与大型监测设备仍有着良好的线性关系,说明造成测量偏差的主要原因不是灰霾事件和高湿天气,而很可能是设备出厂校准时使用的颗粒物组分差异。文中后述的高空实验数据,均经过了图2 中的线性公式校正处理。需要注意的是,由于不同实验地点的颗粒物组分可能不同,在上海以外的研究区域使用本平台进行实验前,应重新进行地面校准。
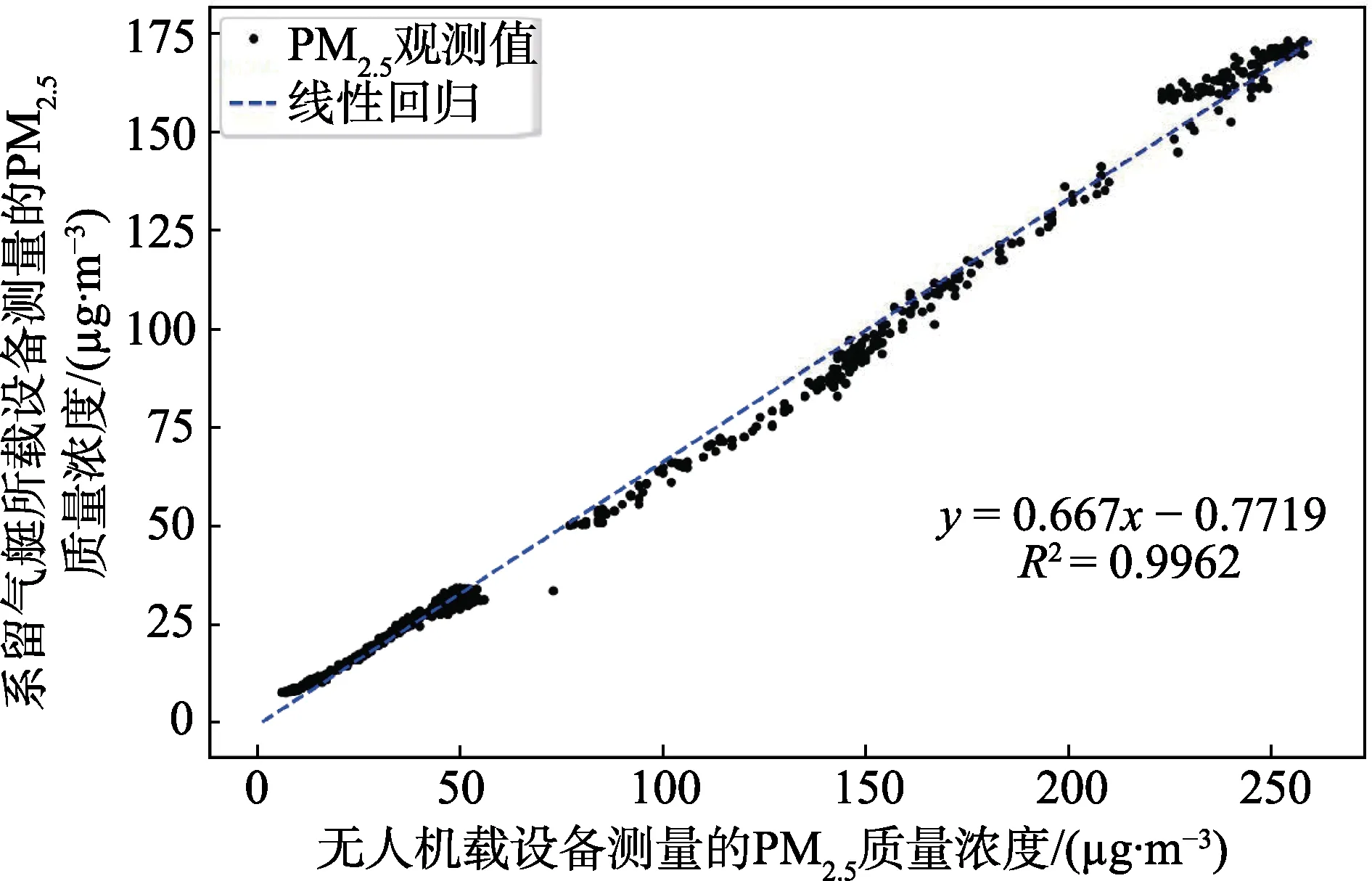
图2 PM 2.5 便携式设备(AM520)与系留气艇 载监测设备对比
1.4 高空比对实验
由于地面比对实验仅能保障无人机在地面静止时的数据可靠性,无法确保无人机平台在高空可以正确获取数据。因而有必要与其他平台在高空进行比对,确保无人机平台在空中的可靠性。
上海市环境监测中心、中国电子科技集团第38研究所及华东理工大学共同搭建的的大载荷系留气艇平台可以提供较大载重,所搭载的设备涵盖了二氧化硫分析仪、氮氧化物分析仪、臭氧分析仪、黑碳仪、气溶胶粒径谱仪等[11],已经在近几年进行了多次观测实验[19-20],基本证明了平台的可靠性。该平台可观测的高度和无人机相接近,均在0~1500 m 高度之间,且主要获取的数据形式均为垂直廓线,故选取该平台与无人机进行高空比对实验。
高空比对观测实验地点位于华东理工大学奉贤校区。系留气艇在校区内垂直上升,考虑到气艇由缆绳牵引,在升空过程中会有水平偏移,出于实验安全考虑,无人机升空位置与气球放飞位置保持约2 km的距离。在2017 年冬季11 月至12 月进行了多次实验,观测高度以 0~1000 m 之间为主,最高达到 1300 m,两平台所测量的气象和污染物垂直廓线可用于比对。
以无人机和系留气艇两平台同时段廓线观测较多的一天(12 月18 日)为例,当天的无人机观测计划为0~1200 m 的垂直观测。无人机按照预设的飞行计划,自动以2 m/s 的速度匀速上升至1200 m 高度,其后以2 m/s 的速度匀速下降至近地面10 m 高度,再切换至手动模式,由飞控手执行降落任务。为保障每个高度层有足够多的数据点,从而减轻仪器数据波动对数据带来的影响,在绘制廓线图和数据分析之前,以每50 m 高度为间隔,对该高度层的观测数据进行平均处理。
由12 月18 日两平台观测数据绘制的PM2.5垂直廓线如图3 所示。可以看出,两平台所获取的PM2.5垂直廓线展现出了较好的一致性,可以初步判断无人机平台所获取的廓线有效,即可以认为无人机平台在执行高空测量任务时是可靠的。
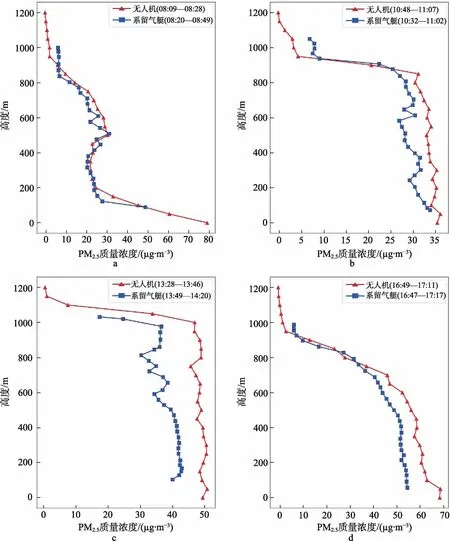
图3 无人机平台和系留气艇平台所获得的廓线比对
2 结果及讨论
2.1 数据质控
对于无人机平台用于大气垂直结构探测而言,最为重要的是其所采集的垂直廓线数据质量。对于温湿度等常见气象参数而言,无人机平台数据质量基本只和所搭载的检测设备本身的性能有关。对于颗粒物和污染气体而言,情况则更为复杂。以颗粒物为例,无人机平台与载人飞机航测面对的问题类似,需要考虑飞行器自身对气流的干扰、气流方向和气流速度对颗粒物采样的影响等因素[21]。因此,以PM2.5为例,重点讨论PM2.5的数据质量控制。
如前文所述,无人机平台在设计和配置进气管路时,已尽量充分考虑上述影响因素。实际的数据质量,需要和其他垂直观测手段的数据进行横向比较。考虑到联合实验中使用的大载荷系留气艇平台已经过充分验证,可以认为系留气艇平台获取的垂直廓线代表了真实的大气垂直结构。因而可以通过比对无人机与系留气艇平台的观测数据是否一致,来判断无人机平台数据质量。
组内相关系数(Intraclass Correlation Coefficient,ICC)这一指标将用于无人机和系留气艇平台的数据一致性评估。这一指标主要用于判定不同测定方法对同一定量结果的一致性,其值介于0~1 之间,0 表示不可信,而1 则表示完全可信。
2017 年12 月18 日的四次对比实验中,由无人机和系留气艇PM2.5观测结果计算所得的组内相关系数和R2见表3。从R2结果可以看出,四次实验中,无人机和系留气艇线性相关性均较好;从ICC 计算结果来看,航次1、航次2 和航次4 的可靠性良好,而航次3 的可靠性一般。造成航次3 信度一般的原因主要如下:首先,航次3 无人机和系留气艇的观测时间有大约20 min 的时间差,这期间PM2.5的浓度存在差异;其次,无人机平台和系留气艇平台尽管保持了良好的线性一致性,由于两平台本身差异,实际观测值仍可能受到两平台的设备数据波动的一定影响。
整体而言,上述结果表明,无人机与系留气艇平台的观测数据线性一致性较好,但个别航次的绝对数值仍有差异。

表3 2017 年12 月18 日无人机与系留气艇平台 PM2.5 观测结果比对
2.2 规律探索
基本确保无人机平台的数据质量后,选取了2017年冬季较为典型的一次无人机观测结果,来说明无人机平台所获取数据在探索大气污染垂直分布规律中的作用。2017 年12 月18 日实验中,无人机平台所获取的PM2.5垂直廓线如图4 所示。整体而言,所有廓线中,PM2.5都随着高度的上升而呈现出降低的趋势,这和过往的PM2.5垂直观测结论相一致[22-23]。
由图4 中还可以看出,在无人机所观测的四个时间段之中,早上地面的PM2.5浓度最高,达到了80 µg/m3。随着高度的上升,PM2.5浓度快速降低,在200 m 高度时,PM2.5浓度已经降到了40 µg/m3以下。到1000 m 高度时,PM2.5浓度更是降低到了接近0,这表明上午期间PM2.5很可能主要受到局地污染的影响。同时,0~200 m 高度的大气层结较为稳定,阻碍了近地面污染物向上空扩散,加重了近地面的污染状况。在之后的几个时间段,PM2.5的浓度从近地面至800 m 高度变化不大,表明在这一高度范围,大气充分混合,近地面的空气质量得以改善。
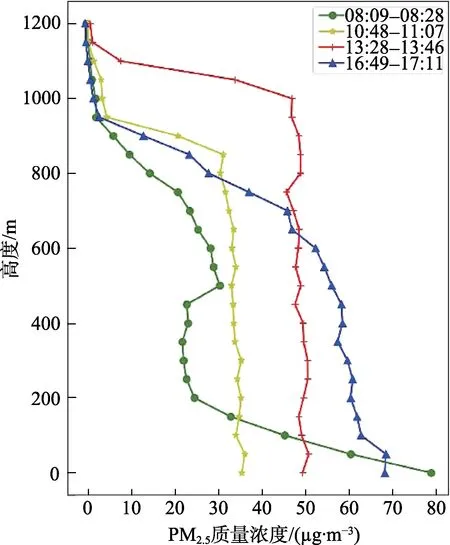
图4 12 月18 日无人机获取的PM2.5 垂直廓线
从上述结果可以看出,无人机平台所获取的垂直廓线有助于直观了解大气边界层内的污染情况,并帮助解释近地面污染事件的发生和消散过程。
2.3 应用中存在的不足
自2017 年以来,文中所搭建的多旋翼无人机平台,已在上海奉贤区等地完成了多次成功的大气垂直结构探测任务。然而,该平台仍存在一些不足之处。
首先,受限于多旋翼无人机的续航时间,该平台无法在1000 m 以上高空进行长时间滞空观测,这限制了平台用于观测高空区域输送。其次,由于平台自身载重和检测设备质量限制,平台的观测指标有限,相较于载人飞机和大载荷系留气艇而言,提供的信息有限。再者,由于空域管制和安全因素,该平台难以用于人员密集的城市中心区域,该区域的大气垂直结构仍依赖于地基雷达遥感等手段获知。
在后续研究中,课题组将考虑进一步改善平台的供电和载质量配置,延长无人机平台在高空的有效观测时间,并增加观测指标。同时,考虑利用平台观测数据结合雷达观测数据,推算城市中心区域的大气垂直结构,拓展无人机平台的应用范围。
3 结论
1)基于便携式检测设备搭建的无人机平台可以用于0~1000 m 范围内边界层PM2.5的垂直探测。
2)无人机平台和系留气艇平台的观测数据一致性较好,但在个别情况下仍有一定的绝对误差,造成误差的主要原因可能是两平台的观测时间差异。
3)无人机平台所获取的污染物信息(如PM2.5质量浓度等)有助于了解边界层内的大气污染时空分布,并帮助解释污染事件的发生和消散。
4)无人机平台仍存在续航时间和适用空域等限制,大范围推广应用前仍需进一步研究解决。
