隧道施工车辆进出管理装置的设计与研究
2019-07-08熊国良朱正清王小明董玉龙
熊国良,朱正清,王小明,董玉龙
(1.华东交通大学 机电与车辆工程学院,南昌 330013;2.上海隧道工程有限公司,上海 200232)
0 引言
近年来,虽然我国盾构法隧道施工安全监管力度不断加强,有力的控制了盾构隧道施工运输作业事故的发生率,但由于隧道等地下工程施工具有其隐蔽性和不确定性等特点,事故发生总数却不断增加[1]。大直径隧道(直径14m以上)施工采用盾构机掘进的施工方法,在路面结构施工之前采用预制口字型构件的形式,预先铺设一道用于施工的工作路面,随着盾构的掘进,口字型构件两边同步施工进行现浇混凝土施工,形成两个剩余车道(如图1所示)。在盾构掘进期间,盾构机采用同步注浆的方式进行管片外与原状土间隙的填充,在隧道中需要配套有管片运输车、口子件运输车、注浆车辆三种施工车辆,此时在单道路(口子型构件)上容易发生交通阻塞和事故。当有外来车辆进出时,这种情况更加严重。在现有技术中,多采用人为管理的方式对进出单道口的车辆进行指挥,这样不仅管理效率低还增加了人工成本,不利于隧道施工交通的管理。此外,随着隧道施工的进展,对车辆的管理也将随着施工推进而前进。为了提高隧道施工交通的通行效率和安全、节约成本及实现车辆进出管理的智能化,本文设计了一种隧道施工车辆进出管理装置。
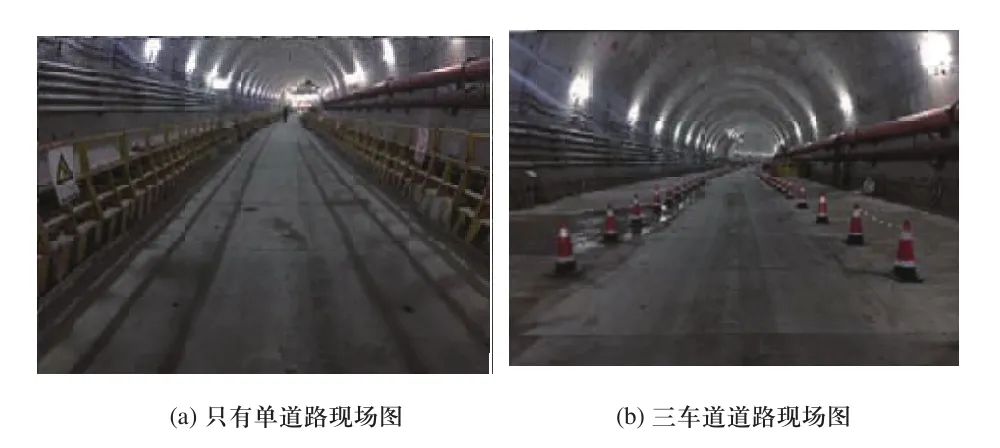
图1 施工现场情况图
1 总体方案设计
1.1 设计要求
装置以上海隧道工程有限公司采用盾构机掘进的施工方法对大直径隧道进行施工为例,如图2所示,对车辆通行的要求:
1)单道口只允许同时有两辆注浆车和一辆管片运输车;
2)单道口只允许同时有两辆注浆车和一辆口子件运输车;
3)单道口不允许同时有三辆注浆车;
4)单道口不允许同时有管片运输车和口子件运输车;
5)单道口内无施工车辆,允许进入外来车辆。

图2 隧道施工示意图
1.2 装置的总体设计
装置主要由一号本体、二号本体和磁阻传感器总成组成,一号本体设置有显示1屏、按键组、防护顶板、报警装置、支撑杆、遮罩、热释红外传感器、超声波传感器、滚轮和控制器;二号本体设置有遮罩、热释红外传感器和超声波传感器,如图3所示。其中,一号本体和二号本体都可以通过滚轮随着隧道掘进而前移;显示1屏和图2中的显示2屏显示的内容同步,显示内容包括:隧道内和单道路内四种车型的数量以及注意行人等信息;按键组包括控制一号本体和二号本体都工作的开关按键和只控制一号本体工作的开关按键,可以适用于不同车道的隧道施工要求;防护板用于保护一号本体的安全;热释红外传感器内含在遮罩中,尽可能减少外界环境对传感器检测的影响。
将一号本体和二号本体分别放置在图2中车辆入口处,并将三车道分成进出车辆两车道,其中二号本体放置在隧道掘进方向的车道处。在分成的两车道处和图2中的监控路口中间位置各埋设两个相距2m~5m的磁阻传感器模块,这两个模块构成两个检测节点。
装置的工作过程:
1)根据实际情况按下相应的按键,当有施工车辆需要进入车辆入口时,首先被磁阻传感器模块检测并通过ZigBee无线传输到控制器判断车型,进一步当该车辆被二号本体的超声波传感器模块检测到时,控制器在相应的车型数量中加1;同理,当有施工车辆需要驶出车辆入口时,先后被磁阻传感器模块和一号本体的超声波传感器模块检测,控制器在相应的车型数量中减1。
2)监控路口处的磁阻传感器模块用于检测进出单道口的施工车辆,并通过ZigBee无线传输给控制器,进行相应车型的加减。
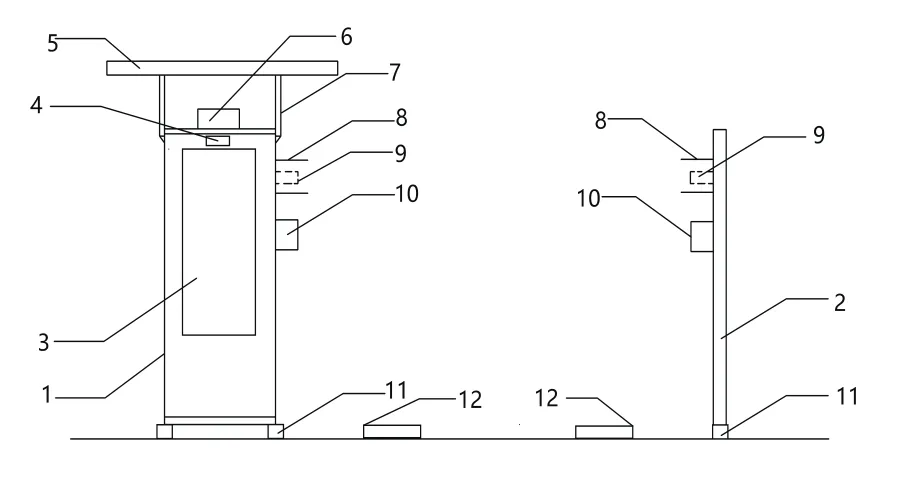
图3 装置结构图
3)当进入车辆入口的车辆会导致单道路内的车辆不符合车辆通行要求时,报警装置报警,并通过显示1屏提醒该车辆进入候车区等候。
4)当行人进出车辆入口时,被热释红外传感器检测,并通过ZigBee传输给控制器,报警装置报警,显示1屏和显示2屏持续10秒显示“注意行人”字样,此时车型数量不进行加减。
1.3 装置的控制系统设计
装置的控制系统以ARM9嵌入式处理器S3C2440为主控制器[2],主要包括ZigBee端的无线模块(其中包括ZigBee节点模块、协调模块)、传感器模块(热释红外传感器模块,磁阻传感器模块,超声波传感器模块)、报警装置、显示1屏和显示2屏,如图4所示。
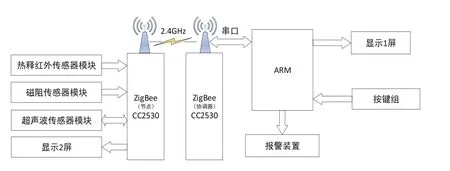
图4 系统框图
2 主要模块设计
系统的主控制器由S3C2440微处理器及其外围电路组成,考虑盾构隧道施工长距离的特征以及对信息处理速率、信号丢包率和误差率等信息的要求,传感器模块和显示2屏通过ZigBee无线模块与主控制器进行信号传输。其中报警装置由蜂鸣器报警电路和MP3语音模块组成,MP3语音模块采用集成语音芯片可直接读取SD卡中的语音文件,并与ARM进行串口通信;显示屏的显示芯片选用LCD12864[3]。
2.1 热释红外传感器模块设计
热释红外传感器[4]的核心是U7红外探头,能够对人体微小信号进行处理并输送到BISS0001红外传感信号处理器,通过对信号的过滤、放大和双向鉴幅器处理输出有效的触发信号,最后转化为数字信号,输入到CC2530中的GPIO口。

图5 热释红外传感器电路图
2.2 超声波传感器模块设计
装置选用HC_SR04型号的超声波模块,可以对2cm~400cm的非接触距离进行测量,测量精度可达2mm[5],装置通过软件设置最大的测量距离为200cm。模块包括超声波发送器、接收器和控制器,共有4个输入引脚,其中两个供电,一个是触发引脚和一个回声引脚。
超声波传感器模块的触发引脚和回声引脚直接与CC2530的两个GPIO口相连,可实现驱动和对数据的采集。
2.3 磁阻传感器模块设计
装置选用PNI11096作为主芯片[6],采用专门的磁阻传感器。该芯片采用SPI总线方式进行驱动,能够检测3个轴向方向的磁性分布,是一种低成本、高效的磁阻传感器。PNI11096在3V电压供电的情况下,增益可达到27~38/uT,性能优良。此外,通过研究其温度与线性度特性曲线可知,温度与输出磁场的增益在0~500uT时,具有极好的线性度,符合隧道内三种施工车辆:管片运输车、口子件运输车和注浆车辆的检测,因此可以将隧道内的车辆分成四种车型:三种施工车辆车型和外来车辆车型。PNI11096通过SPI总线与CC2530芯片进行通信,在连接时将PNI的Reset、SCLK、MISO、DRDY、MOSI和SSN与CC2530中的GPIO相连。
车型分类算法:主控制器读取车辆通过其中一个检测节点的时间T,并通过双节点车辆速度检测方法[7]测得车辆通过的速度v。利用公式H=v×T确定车辆的检测长度即车辆发动机到后轴位置的长度,实际的车辆长度由公式:H=λ×v×T算出,其中λ为延长因子,是一个经验值。
2.4 电源模块设计
装置可以选用220V交流电源通过电源适配器转变成5V直流电或者5V锂电池直接供电。考虑到协调器节点和磁阻传感器的供电电压分别是3.3V和3V,因此本文设计了相应的电源模块,如图6所示。

图6 电源模块设计图
3 系统软件设计
装置的软件设计部分包括:ZigBee端和主控端的软件设计,其中ZigBee端主要是自身传感网络的实现,涉及节点与协调器的通信机制以及相关传感器的实现;主控端主要包括自身的程序、显示屏程序和报警器装置程序。
3.1 ZigBee端程序流程图
ZigBee端的网络构建主要包括传感器节点与协调器,协调器与传感器节点在数量上存在着一对多的关系。协调器作为系统的主控制节点,负责与主控制器通信、网络建立、节点加入、网内各地址分配和地址列表建立等,协调器工作流程如图7所示。
传感器节点需要硬件初始化,如果没有收到请求时,节点处在休眠状态,降低能耗。当收到请求时,传感器模块进行数据采集并发送,完成后如果没有出错信息或请求,继续处在休眠状态,等到下一个指令被激活,传感器节点工作流程如图8所示。
3.2 主控端程序流程图
传感器采集到的数据由主控制器处理并完成,一方面发送给协调器,实时监测,并通过显示2屏显示相关信息;另一方面直接控制报警装置工作和显示1屏显示与显示2屏同样的信息,工作流程如图9所示。

图7 协调器工作流程图
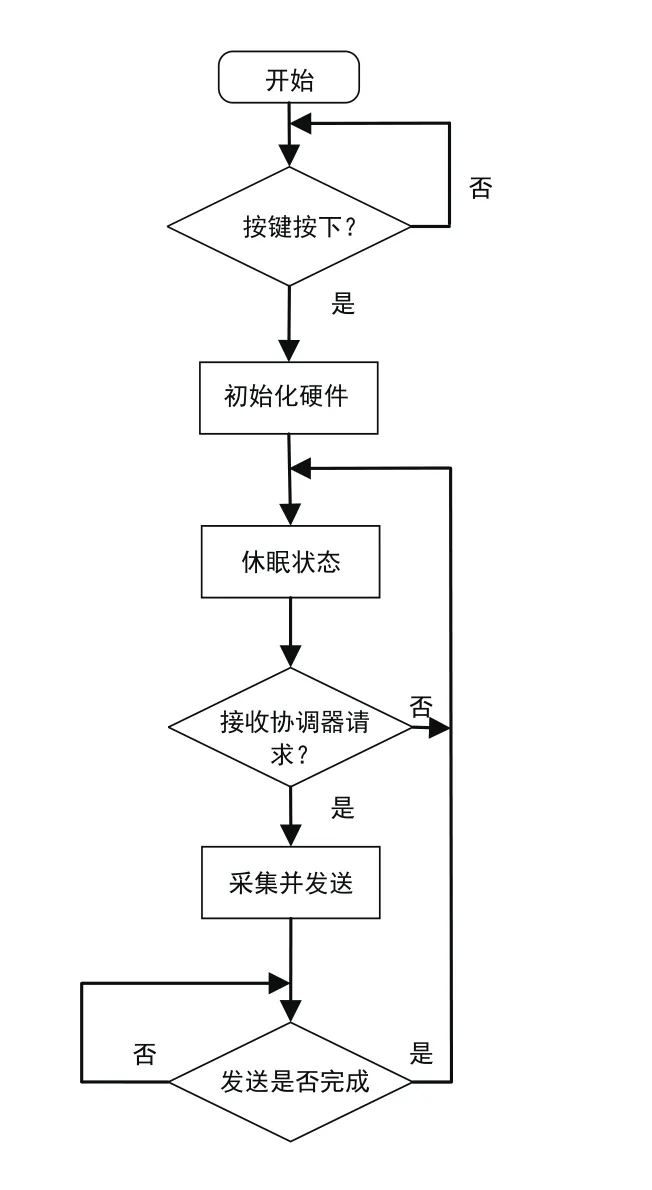
图8 传感器节点工作流程图
4 结论
本文对隧道施工车辆进出管理的解决方案进行了探讨和研究,通过对无线数据传输准确性试验分析,如测得超声波能检测到2m以内的障碍物,误差不超过0.01m等,能够实现采用盾构机掘进施工方法对大直径隧道施工的车辆通行要求。
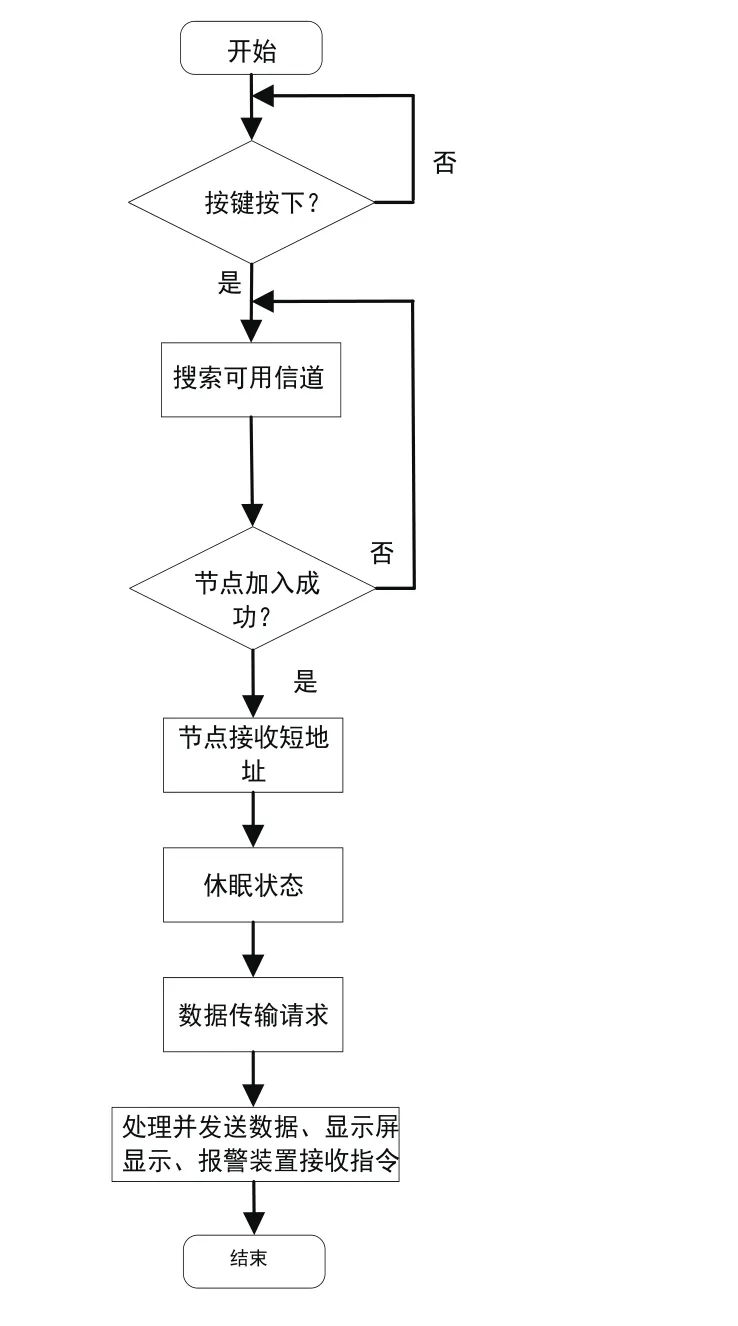
图9 主控端工作流程图
该装置将有利于大型隧道对施工车辆进行管理,降低管理成本、提高管理效率、更具安全和智能化。特别是其具有可移动性及扩展性,便于安装、更新、组网,提高了施工车辆管理的灵活性,具有很强的使用价值和社会意义。此外,该装置还可以通过Internet实现远程监控,从而实现隧道施工安全的智能化。
