关于现有救助艇改装遥控操纵的可行性探讨
2019-06-30黄安康
黄安康


摘 要:21世纪,科技信息化高速发展,我国即将进入5G时代,AI、VR、AR、无人驾驶等技术不断发展成熟。在此大背景下,救助装备的科技信息化发展已成必然趋势,海事系统已初步完成智能海上无人巡逻艇的研发,系统内单位已就海上无人救生艇展开研究。本文就如何对现有救助装备(救助艇)进行信息化升级展开探讨。关键词:救助艇;遥控;救生;信息化
0 引 言
现有救助艇为有人操纵模式,在救助中发挥着关键作用,是目前救助中的重要装备。但现有救助艇受气象海况限制明显,主要原因是在超过一定海况后,人员操纵和收、放艇作业中的安全风险较高,救助人员自身安全受到严重威胁。本文旨在不影响现有救助艇功能及结构的前提下,初步实现救助艇远程可视遥控功能,以供紧急或特殊情况下使用。
1 实施方案
1.1 遥控系统组成单元
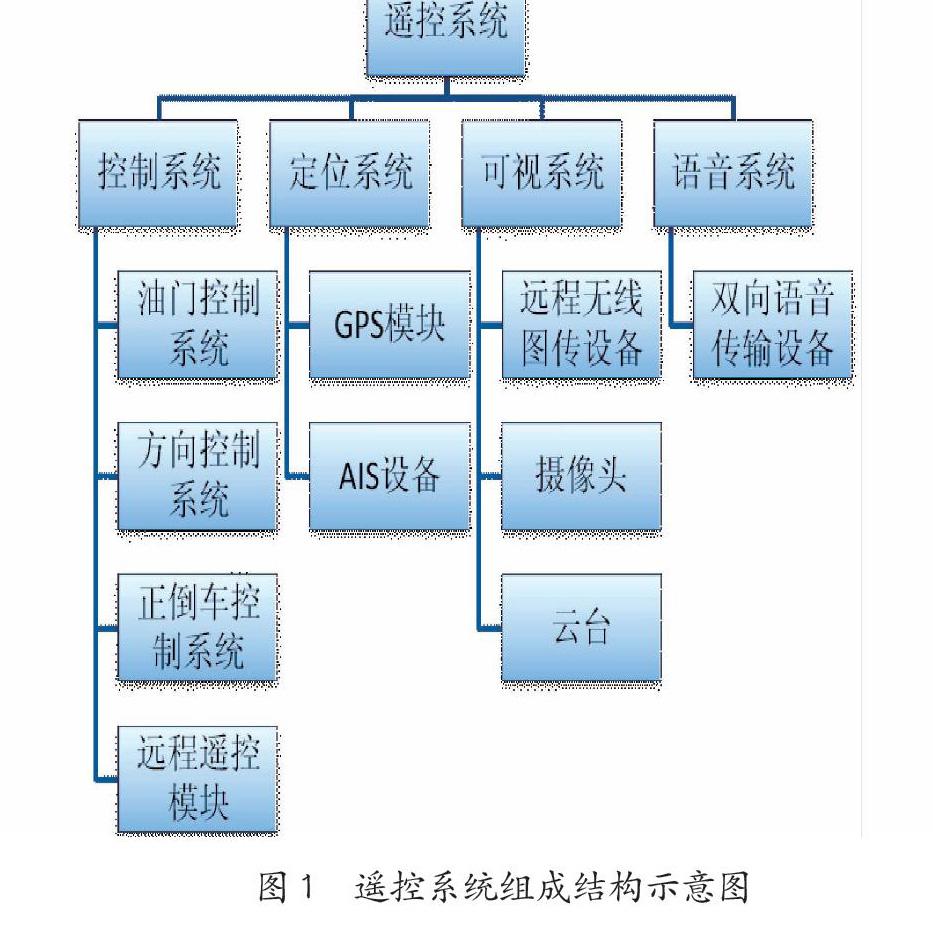
遥控系统是一个综合性控制系统,主要由控制系统、定位系统、可视系统及语音系统组成,其中核心控制系统由油门控制单元、方向控制单元、正倒车控制单元及远程无线数传单元等组成,其他系统由相应子单元配合组成(见图1),整套遥控系统的加装,可初步实现现有救助艇的远程可视遥控操纵功能(L1级无人驾驶)。本文主要涉及现有救助艇控制系统的改装及定位系统、可视系统、语音系统的加装,着重针对救助艇控制系统的改装展开讨论。
1.2 现有救助艇控制系统工作原理(以DHJ204开敞式救助艇为例)
DHJ204轮开敞式救助艇为单车单舵喷泵推进动力系统,喷泵型号为Alamarin Jet 230,如图2、图3所示。艇机型号为4LHA-HTP,其控制系统由舵轮及单控制手柄组成,其中控制手柄集成正倒车控制与油门控制功能。救助艇控制系统具体工作原理如下:
转向控制原理:救助艇喷泵转向控制单元通过软轴与舵轮连接,舵轮端软轴前端为螺旋状蜗齿结构(弹簧形状),软轴与舵轮通过齿轮啮合实现舵轮对方向的控制。正倒车及油门控制原理:DHJ204艇机油门及喷泵正倒车控制由单一控制手柄操作实现,具体原理如下:如图4所示,上层结构为油门控制拨片,拨片通过软轴与艇机油门连接,控制手柄的转动带动油门拨片的移动,从而控制艇机油门的收放;如图5所示,为正倒车控制拨片,拨片通过特殊齿轮结构与控制手柄转动轮连接,同时拨片通过软轴与喷泵正倒车控制液压阀连接。油门与正倒车的集成通过如图所示結构实现,工作原理为:当控制手柄从零位开始转动时,正倒车控制拨片通过齿轮啮合同步移动,实现正倒车控制的转换(此时油门控制拨片不随控制手柄移动),当控制手柄移动到一定角度,控制手柄转动轮与正倒车控制拨片齿轮脱开后,拨片不再随控制手柄的继续移动而移动,正倒车控制转换完成;完成正倒车转换后继续推动控制手柄,此时手柄转动轮带动油门控制拨片移动,从而控制艇机油门的收放。
以上油门、方向及正倒车控制都是通过物理连接(软轴)的方式与相应的操纵手柄连接,充分了解上述系统控制原理和结构是下阶段加改装工作的前提和基础。
1.3 加装方案
(1)控制系统改装方案
控制系统的改装是本方案的重点,在不改变现有救助艇操纵功能的前提下,如何实现遥控控制是本方案的关键,具体改装方案如下:
结合上述救助艇控制系统的结构及原理,本方案拟在油门、方向及正倒车控制操作端各合适位置安装一台扭力舵机,扭力舵机通过连杆与各控制拨片、软轴固定连接并提供移动力矩(不改变现有结构,遥控、手动都可实现操作),各舵机通过线缆及端口与遥控芯片连接。
(2)可视及语音系统加装方案
遥控操作距离超出视距范围时,需要加装视觉及语音设备提供辅助,具体方案为:在救助艇制高点(扶正浮箱位置)安装一部云台及前后摄像头、语音设备,摄像头与无线图传设备连接;云台可确保摄像头在救助艇摇摆时画面的稳定性和视角的移动控制,整个装置通过适当材质的半圆形透明罩进行水密保护,并存放适量干燥剂,确保设备环境干燥。
(3)整体远程可视遥控功能的实现
经过上述的加改装,救助艇已基本具备远程可视遥控操纵功能,只需将相应的设备(包括GPS模块)通过线缆及端口与遥控芯片连接,并通过远程无线图传、数传设备与遥控器保持实时的数据交换,从而实现远程可视遥控操纵功能。
本方案中所涉及的电子元件的加改装在安装后都要进行水密保护处理并保持设备环境干燥,确保各设备稳定运行。
1.4 现有技术条件
要实现上述功能,需要无线数、图传送设备,扭力舵机,无线云台、摄像头,以及遥控芯片等设备的支持,根据前期的摸底查询,目前上述设备现有技术已比较成熟,具体性能如下:
(1)无线数、图传送设备
现有性能较好的设备基本采用双路冗余、双天线双模块设计,具备超远链路扩频技术及全角度增益天线。在无大型物体遮挡环境下,理论通信距离可达30~50 km,实测性能可达在10 km左右传输,5 km左右稳定传输,且不需要互联网支持,满足远海环境条件使用。
(2)扭力舵机
以现有产品为例,尺寸:9.5*6*10(cm),工作电压:12~24 V间都能运行,最大扭矩:180 kg/cm(24V),响应速率:0.12S/60°(24V)。现有扭力舵机产品大小适中,力矩大,响应速度高,适合在救助艇内较小空间安装及快速反应操纵。
(3)无线云台及摄像头
目前,现有相关产品已非常成熟,摄像头图像回传分辨率可达高清以上,云台方向角度可通过远程调整控制,符合在远程遥控时视角的转换需求。
(4)遥控芯片
遥控芯片是整个遥控系统的核心部件,需将所有附加设备全部整合到一起,实现多通道的联合控制。目前,现有的遥控芯片可实现24通道以上的设备连接整合(本方案只需8通道),且可通过手机APP或电脑软件连接对设备进行调试和控制,满足现有改装方案的需求。
结合上述加改装方案及现有设备技术条件,本人认为对现有救助艇在不改变现有功能及结构的条件下,改装遥控操纵的难度适中,成本不高,技术条件满足,改装方案可行性较高。
2 应用前景
2.1 提升应急能力
具备远程可视遥控功能的救助艇可作为应急手段,在恶劣天气下无法有人操作或不适合人员上艇作业等特殊情况或紧急情况下使用,作为自身应急处置能力储备。
2.2 锻炼队伍,储备技术
救助装备科技信息化升级发展是必然趋势,经过信息化升级后的救助艇可作为日常训练装备,提前培养和训练一批初步具备操控信息化救助装备的人员,为建设国际现代化救助队伍储备人才和技术。
2.3 补充救助手段,提升救助能力
现有救助艇虽受气象海况限制明显,但机动性能良好,抗风浪能力较强且具有自扶正功能,经过信息化升级后的救助艇可在较恶劣海况下遥控作业,规避人员安全风险,作为现有救助手段的补充,提升现在救助能力。
2.4 探索道路,提升信息化水平
我国现代化航运发展起步较晚,在航海技术和航运装备方面较西方发达国家还存在一定距离,尤其是海上信息化救助装备的研发和投入较航运发达国家还存在较大差距,面对部分西方国家对我国的技术封锁,唯有自身摸索,不断研究,才能自立自强。本方案对现有救助艇的信息化改装亦基于上述观点,通过自身的探索和积累,逐步发展强大,不断提升救助装备科技信息化水平。
3 结 语
以上是本人在实际工作中的一点想法和感悟,仅供各位同行参考,希望能为国家救助事业的发展贡献自己的一点力量,如有不足之处,请批评指正。
