基于KeMotion系统的一种新型机械臂自动取料气夹装置的开发
2019-06-15叶坤煌
叶坤煌
摘要:项目是在KeMotion系统设计一种能自动取料的气夹装置。其结构主要由连接杆和真空吸盘构成,各部件相互之间是采用螺栓进行固定的,每个连接杆下方都安装有相对应的吸盘,并且通过其顶端的旋转装置器来完成转动连接功能的。在运行状态下吸盘的内部会产生一定的负压力,而这种负压力也会产生一定的挤压和排压力,而且要通过外力吸住内部的空气,才能达到吸住物料的效果。同时该种机械臂完全能够代替人工对物料的取放工作,避免了人工搬运的低效率,满足现代企业的高效率使用要求。
关键词:KeMotion;机械臂;自动取料;气夹装置
中图分类号:TH-39 文献标识码:A 文章编号:1007-9416(2019)03-0001-02
0 引言
随着智能化时代的不断发展,自动化控制在工业生产中起着至关重要的作用,因此对于一些搬运取料设备的生产效率也要不断更新,让自动化控制的整体优越性能更好地体现出来,发挥其重要作用,进而代替人工搬运,这样将会使企业的生产运作大大的改变,为企业带来长远和可观的生产效益。由于我国人口老龄化日趋严峻,越来越多的生产企业出现用工难,而且也面临着劳动力成本不断上升的困境,因此自动化机械就显得尤为重要,而且其智能化要求也越来越高,由于在生产工艺较复杂的工况中自动化机械臂能代替人工操作,大大减少了劳动力,因此被受企业的广泛使用。而自动化机械臂性能的好坏、结构的合理,将直接影响其企业的生产效率。随着国家综合实力的飞速发展,企业对自动化机械臂的需求也越来越大,使市场形成了强制驱动作用,所以只有不断开发出更好的自动化设备,才能受到企业的好评和廣泛使用。中国是一个人口大国,劳动成本越来越高,面对庞大的人口基数,设计研发一款实用的自动取料机械臂具有重大的现实意义。机械行业是一个技术要求相对较高的行业,改革开放以来,随着科学技术的提高以及国外机器人的引进,国家注重市场的研发,继而扩大市场份额,因此对国内的小型机械化行业具有一定的影响。
1 KeMotion系统的概述
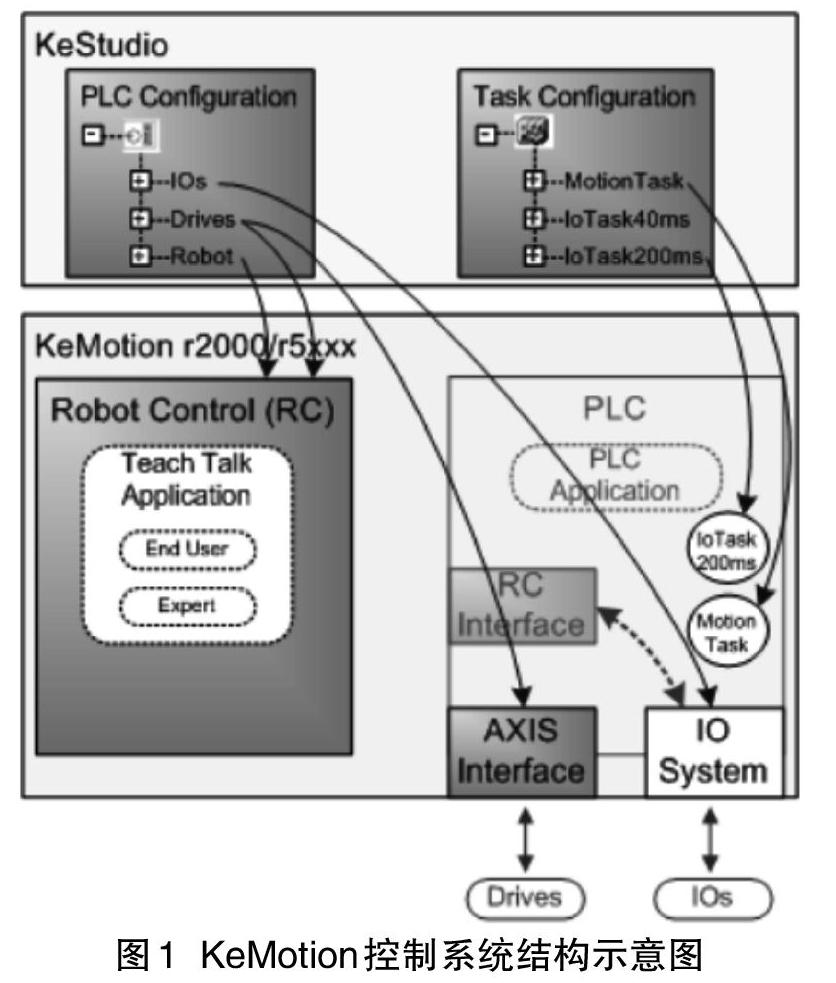
KeMotion是一款多轴运动机器人的控制器,而这款控制器自身控制系统软硬件都是属于模块化的。系统硬件是KeMotion 控制器和各种外部控制模块,其连接方式是通过以太网总线与控制器进行相互连接的,能和各种应用软件进行相互兼容。软件方面也为用户提供了一整套完整的操作手册、故障诊断、故障排除、参数调试等应用。
KeMotion控制系统结构示意图如图1所示,其结构共分成三部分:第一部分是控制器的控制系统软件;第二部分是终端运行的软件,主要有监控、操作、诊断等;第三部分是在PC上运行的工具软件,具体是编程开发、监控、操作、诊断程序等。
2 取料机械臂的主要组成
工业机器人按其运动形式可分为四种,每种机器人根据其工作场所不同,运动方式不同。有的是通过液压系统进行驱动,这种机器人一般需要承受较大的力,有的是通过气动系统进行驱动,还有对精度要求较高的是采用伺服电机进行驱动。因此在对取料机械臂基座进行设计时要考虑其足够的刚度和强度。
取料机械臂主要是由伺服电机、基座、手臂、手腕、夹持装置和控制系统等组成的。此类型机械臂和其他类型的机械臂有着很多优越性,具体是机械臂在夹取物料时要保证机械臂整体稳定性,因此探头就要根据不同类型的工件需要,设计不同自由度的夹取方式,而对于一些工件结构相对较复杂的,对机械臂的要求也就会更高了。同时机械臂的驱动形式也是各种各样,有些采用液压驱动,比如搬运机械臂;有些采用气压驱动,比如採抓机械臂;还有些采用伺服驱动的,比如本项目的设计就是采用伺服驱动的,所以机械臂各个关节要实现自动化必需采用伺服电机进行控制。
3 自动取料气夹装置的原理和设计
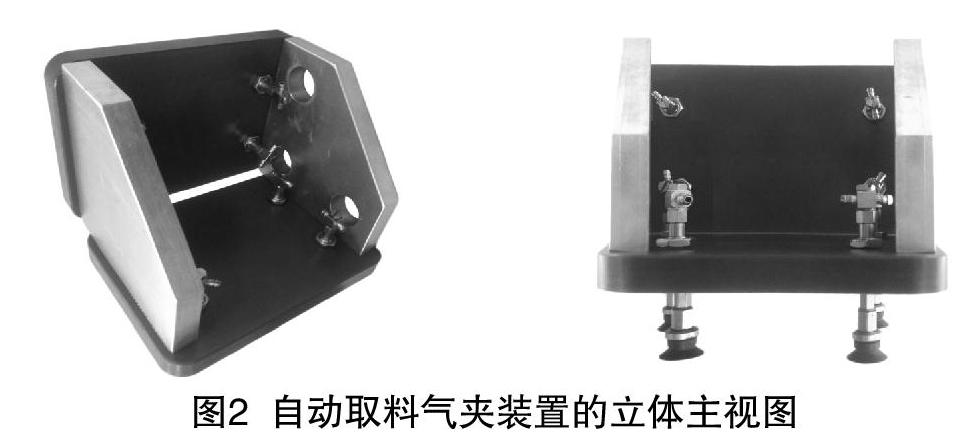
当取料机械手运行工作时,要根据工件的实际位置,通过转台的转动,并调节机械手臂和气夹间的角度、方位来抓取物料的。虽然机械臂每个关节都安装了气压缸,再运行抓取物料时,看似一个简单的动作,但是需要复杂的程序和坐标点进行准确定位,才能保证准确抓取工件。市场上机械臂的种类有千百种,而且影响我们生活的方方面面,因为它们具有操作方便、可靠性高、安全、舒适等特点。机械臂的运动是通过调节各个关节运动来实现其操作要求的,以下是自动取料气夹装置的立体主视图,如图2所示。
项目中取料机械臂是多角度多方位对工件进行夹持的,因此设计时必需考虑取料机械手的自由度要多,而且灵活性也要好。取料机械臂开始运作时首先要对取料的相对位置进行踩点和定点,并通过触点传感器把信号反馈给PLC控制系统,然后通过收集的点坐标进行反馈,最后机械臂才会开始对工件进行抓取。此项目的机械臂结构是由连接杆和真空吸盘构成,各部件之间的紧固是通过螺栓进行固定的,每个连接杆下方都安装有相对应的吸盘,运行时通过顶端的旋转装置器来完成转动连接功能的。并且在运行工作时吸盘的内部也会产生负压,而这种负压会产生一定的挤压和排压,如果要吸住物料,需要借助外力来吸住内部的空气,以达到吸住物体的效果。这种设计也可以使每个关节进行不同方位的运动,并通过伺服系统的控制,最终达到运转的相关要求。当抓取的工件物料较为复杂时,抓取的时间就会长,而且抓取的精度也会略低,当抓取的工件物料形状较简单时,抓取的整体效果和质量就会好,时间也会比较短,因此要根据实际抓取的物料选择设计方案,才能设计出不同类型的取料机械臂,这样才能够做到物极所用。
4 取料机械臂手腕的结构设计
根据我校现有实验室物料取放的通用性,并结合设计理念,可采用垂直方式抓取物料,因此机械臂手腕设计时要设计相应的摆动弧度才能满足取料的使用参数要求。在运行工作时,要使驱动手腕回转,驱动力矩必须克服起动时所产生的惯性力矩,因为转动时会产生转动轴与支承孔的摩擦力矩,还有动片与缸径、定片、端盖等处的摩擦力矩,以及转动部件的中心与转动轴线不重合所产生的偏重力矩。因此手腕运行转动时所需的驱动力矩可按以下算式计算:
M驅=M惯+M偏+M摩+M封
式中:M驱是表示驱动手腕转动的力矩;
M惯是表示惯性力矩;
M偏是表示转动部件的重量对转动轴线所产生的偏重力矩;
M摩是表示转动轴与支承孔处产生的摩擦力矩;
M封是表示手腕回转缸的动片与定片、缸径、端盖等处密封装置的摩擦阻力矩。
5 结语
伴随着人类社会全面而又高速的发展,现代化、智能化水平的不断提升,人类社会和人们生活正在发生着日新月异的变化。本项目的设计理念是根据机械臂的结构特点进行设计的,首先分析了取料机械臂在国内外的使用情况,通过对其工作原理和机械臂的各个部分进行力学分析才完成设计的。该类型机械臂采用的是PLC控制器,其控制核心稳定,使用高效快捷,同时为了进一步简化其内部结构,减少装置内部的传感器安装,也为了避免人工搬运的低效率和不安全性,因此也对机械臂的构成和分类作了工艺上的设计和改进,以此来满足现代企业的高效率使用要求,从而来降低企业的生产成本和维修成本。
参考文献
[1] 李林青,陈绮丽,刘伟,张卓军,李若泓.注塑机平行式自动取料机械手设计[J].机械工程师,2011(11):9-11.
[2] 孙新国.玻璃镀膜取料机械手设计[J].湖南科技大学学报(自然科学版),2011,26(01):43-47.
[3] 周鸿杰,骆敏舟,李涛,徐林森,胡晓娟.基于PLC的工业取料机械手系统设计[J].工业仪表与自动化装置,2010(03):50-52+57.
[4] 周鸿杰,骆敏舟.基于步进电机的工业取料机械手的定位控制[J].自动化与仪器仪表,2010(01):123-125.
[5] 何勰绯.基于工业PC的取料机械手控制系统[J].工业控制计算机,2009,22(07):6-7.
[6] 何勰绯.多线程在工业取料机械手控制软件中的应用[J].机电产品开发与创新,2009, 22(03):184-186.
Development of a New Automatic Feeding Air Clamp Device for
Manipulator Based on KeMotion System
YE Kun-huang
(Minnan Polytechnic Institute,Shishi Fujian 362700)
Abstract:The project is to design a kind of air clamp device which can automatically fetch material in KeMotion system. Its structure is mainly composed of connecting rod and vacuum suction cup. Each component is fixed by bolts. There are corresponding suction cups under each connecting rod, and the rotating connection function is completed through the rotating device at the top of each connecting rod. In the operation state, the suction cup will produce a certain negative pressure, and this negative pressure will also produce a certain pressure of extrusion and drainage, and through external force to absorb the internal air, in order to achieve the effect of absorbing materials. At the same time, this kind of manipulator can completely replace the manual fetching and placing of materials, avoid the low efficiency of manual handling, and meet the requirements of modern enterprises for efficient use.
Key words:KeMotion; mechanical arm; automatic feeding; air clamp device
