计算机视觉技术在无人机上的应用
2019-06-07黄洁唐守锋童敏明
黄洁 唐守锋 童敏明

摘 要:计算机能力的提高与计算机视觉技术的快速,使无人机从最初的军事领域扩展到其它行业,得到了广泛应用。通过查阅文献,对无人机及计算视觉技术的起源与发展进行全面回顾,总结近年来计算机视觉技术结合无人机在农业、电力、交通、环保、救援、娱乐等领域的相关应用,对相关的调查数据进行分析统计并以图表的形式展现。通过数据可以清楚发现计算机视觉与无人机的结合在未来还有很大上升空间。
关键词:无人机;计算机视觉;自主应用
DOI:10. 11907/rjdk. 181607
中图分类号:TP301文献标识码:A文章编号:1672-7800(2019)001-0014-03
Abstract: The improvement of computer capabilities and the development of computer vision technology have made important progress in the development of drone technology and applications. These technologies have provided a wide range of applications for drones and have risen from the initial military goals to applications in various industry sectors. This paper reviews and summarizes the origin and development of UAV and computer vision technology. Through reading the literature, the computer vision combined with the autonomous application of drones that has emerged in recent years is summarized,including agriculture,electricity,transportation,environmental protection,rescue,entertainment, etc., the relevant survey data are analyzed and counted and displayed in the form of charts. Through the data, it can be clearly seen that the combination of computer vision and UAV has much room for growth in the future.
Key Words: UAV; computer vision; autonomous application
0 引言
计算机视觉也是近年兴起的科学学科,由大卫·马尔(David Marr)在20世纪80年代提出,最初独立于其它学科。基于社会发展需要,无人机成为人工智能领域研究热点,被广泛应用于个行业领域。计算机视觉能为无人机提供大量丰富的视觉信息,以便获取无人机相对位置并调整方位。计算机视觉与无人机的融合在实际应用中已有很多成功的实例。2018年3月,挪威峡湾将无人机用于垃圾清理的计划已经正式启动。据《英国卫报》2018年3月8日的报道,美军一项无人机项目使用谷歌的人工智能技术,以供军方审查,该项目标志着无人机与计算机视觉技术的成熟融合。
1 计算机视觉技术
计算机视觉技术是一种复杂仿生的过程,相比一般传感器仿生技术,计算机视觉技术不仅是从环境中搜集图像及视频信息,还要通过计算机模拟人类大脑,对视觉传感器搜集到的信息进行处理分析。计算机视觉技术已在不同的智能应用中显示出强大的信息处理能力,但与人类带有感情目标地分析信息相比,还有很大差距。
计算机视觉技术这个概念被马尔在《视觉》中最早提出,他认为计算机视觉的理论方法首先应该从图像开始,并提取真实物理场景的内容。在90年代,研究集中于计算机视觉技术在物料表面粗糙度檢测上的相关文献,赵学增[1]在1992年曾发表《木质材料表面粗糙度计算机视觉检测技术的研究》。与此同时,计算机视觉技术已经开始渗透各个领域,1997年王潮[2]发表的《基于计算机视觉的实时交通流检测》中通过计算机视觉技术对车速、车流量等进行实时监测。此时,计算机视觉与无人机的结合还处于几乎未知的状态,直到21世纪初,计算机视觉与无人机技术的结合开始掀起一股热潮,计算机视觉技术与无人机的结合用于无人机的自主着陆[3]、姿态测量[4]、导航避障[5]的研究已经陆续出现。到目前为止,计算机视觉技术与无人机仍是人工智能领域的关注焦点之一,存在巨大发展空间。
2 无人机
无人机最初的起源于第二次世界大战,带动了全球航空技术进步。中国的无人机实际上起源于前苏联。在20世纪60年代,中国研发了自主产品,被称作长空一号, 1986年,吕庆风[6]发表的《“长空一号”无人机系列的研制与发展》,提出对长空一号进行一系列性能改进。改进后的长空一号被成功投入军事领域。
在20世纪末21世纪初,全球无人机发展聚焦于军事应用,无人机在军事上的研发[7]及应用较多。随着经济的发展,无人机逐级扩展到其它领域。商业上,无人机常被用于监控线路、农业检测或辅助灾难救援等;生活上,一些小型无人机常被用于航拍婚礼、赛事体育等众多项目。
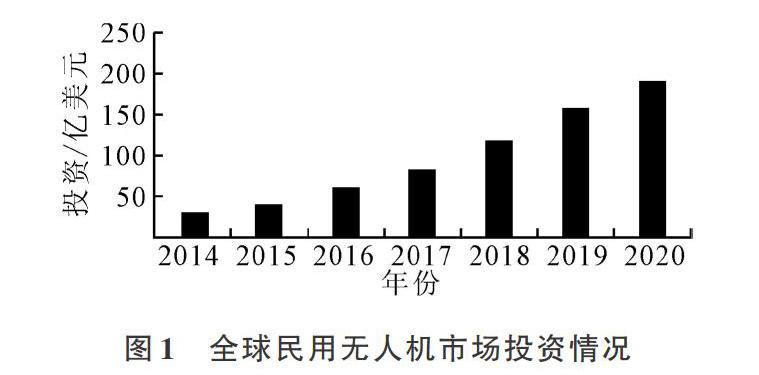
高远洋[9]在《“无人机+”时代的生活是什么样的?》中提到了无人机在各个领域的应用,其中包括农业、电力、交通、环保、救援、娱乐等等。中国报告网根据调查,对全球民用无人机市场规模作出预测,并统计了无人机市场地域占比,如图1、图2[10]所示。近年来无人机发展异常迅猛,虽然涉及到的领域明显扩大,但在性能及要求上还存在很大空间。因此基于人工智能的无人机还有巨大的发展空间和潜力。
3 计算机视觉与无人机的结合
计算机视觉技术与无人机的结合逐渐从最初的航拍扩展到其它项目。2010年,王迪伟[11]提出了无人机航拍在外业调绘上的应用,指出无人机不仅缩短了作业周期,还极大提高了调绘精度。随着社会发展需求的需要,无人机与计算机视觉相结合不仅用于地形测绘,还常用于自然灾害灾情获取,通过自主应用对灾区进行食物、水的投递。
3.1 基于计算机视觉的无人机自主加油
2011年,丁萌等[12]提出使用无人机进行空中加油,空中加油指飞机在飞行过程中给其它飞机加油,当前世界上有两种自主空中加油技术,一种是插头—锥管式,被称为软式加油,通过加油吊舱放出加油软管,受油机飞行员操纵飞机使受油探头与加油锥套对接,顶开锥套内的单向活门实现加油。其优点是可以同时为多架飞机加油,还可以给直升机加油,缺点是加油速度较慢,受空气乱流影响较大,对受油机飞行员技术要求较高。另一种是伸缩套管式,加油也称为硬式加油,它是由控制机构、伸缩式加油管以及压力供油机构组成,加油对接主要由员完成。其优点是加油速度较快,对受油机飞行员的技术要求较低,但一次只能为一架飞机加油,而且无法给直升机加油。第一种技术的关键之处就在于准确地估计探头相对于锥套的位置和姿态,对此,已经有人提出基于单目视觉测量位置和方向的方法[13]。
3.2 基于视觉的无人机自主着陆
自主起飞与着陆是其最基本也是关键的技术之一。即使没有操控员操作,无人机也可以通过惯性导航[14]、GPS导航[15]以及计算机视觉技术导航[16]等方法实现着陆,其中惯性导航误差大,而GPS导航相对比较成熟,计算机视觉技术是新兴技术。2003年,刘新华[17]提出在无人机的自主着陆过程中,通过计算机视觉技术获取无人机姿态角的方法。通过使用MATLAB对拍摄到的灰度图进行处理,从而检测出图像中的地平线,以便控制无人机着陆[17]。计算机视觉技术刚被用于无人机的着陆时鲁棒性不好,近年来发展迅速,无人机着陆的鲁棒性不断被改善。刘畅等[18]提出利用结合视觉和惯性的导航算法获取高精度的自主着陆中的导航信息。
3.3 基于视觉的无人机自主着陆
无人机与计算机视觉技术的结合不仅用于实现飞机加油、起飞、降落技术,还被用于众多其它行业。2015年,周辉[19]提出计算机视觉技术在无人机进行电力巡检中的应用,其中无人机利用计算机视觉的视频跟踪技术对绝缘子等特定目标进行定位跟踪,实现自动导航,该应用有效地解决了恶劣环境下人工巡检的安全问题。2016年,王昌[20]提出模拟无人机平台,通过计算机视觉技术对油菜田中的杂草进行识别处理,并且通过试验技术其精度证明很高,研究发现基于全波段和特征波段反射率的分类模型预测精度均高达100%。除了对杂草进行检测,还有研究者提出利用安装在无人机上的红外设备监测农作物虫害和缺水缺肥的问题,甚至可以预判森林火灾的可能性,并将地理位置信息通过无人机系统准确反馈给控制平台,这是计算机视觉与无人机结合在农业成功应用的典范[21]。2017年,贾其臣[22]提出以无人机为平台,搭载视觉系统,对行人流量进行检测与跟踪,在特定场合中,该应用可以帮助避免人多区域的踩踏及其他危险事件,帮助维护公共安全。
4 结语
计算机视觉和无人机前景十分广阔,随着技术不断深入发展,无人机技术有望在深度学习方面产生更大突破,例如:无人机取代快递员人工投递的方式,进行定点投递。在安防行业,通过无人机的摄像头读取捕获到的信息并通过无人机系统送回控制台,实现单人对多片区的安全监控,或者是结合街道摄像头用于追踪逃犯及失踪妇女小孩等。本文对无人机及计算机视觉技术作出回顾及评估,有助于帮助人们加深对无人机的认识,文中提出的新颖应用可以为无人机科研爱好者提供创新点。目前用于矿井灾后无人机救援定位等相关文献不多,在该方面的研究还不够深入,针对还未成熟的领域如何更加智能地实现无人机与计算机视觉技术结合是未来研究的重点和难点。
参考文献:
[1] 赵学增. 木质材料表面粗糙度计算机视觉检测技术的研究[J]. 东北林业大学学报,1992(5):55-60.
[2] 王潮,宣国荣. 基于计算机视觉的实时交通流检测[J]. 计算机工程,1997(S1):276-278,375.
[3] 徐貴力,程月华,沈春林. 基于激光扫描和计算机视觉的无人机全天候自主着陆导引技术[J]. 航空学报,2004(5):499-503.
[4] 丁萌,曹云峰. 利用计算机视觉获取无人机飞行姿态角[J]. 传感器与微系统,2007(11):65-68,74.
[5] 朱凯凯,初阳,华维超. 机器视觉在无人机智能避障的应用[J]. 通讯世界,2016(21):282.
[6] 吕庆风. “长空一号”无人机系列的研制与发展[J]. 南京航空航天大学学报,1986(S1):1-18.
[7] 于黎明,王占林. 军用无人机的发展趋势及其关键技术[J]. 航空科学技术,1999(1):9-10.
[8] 邱晓红,景华. 无人机系统技术发展趋势[J]. 航空科学技术,2000(1):28-30.
[9] 高远洋,薛傅龙. “无人机+”时代的生活是什么样的?[J]. 课外阅读,2018(06):60-61.
[10] 前瞻数据库. 无人机市场需求逐渐提升 预计2018年市场规模突破百亿大关[EB/OL]. http://www.81uav.cn/uav-news/201806/23/38443.html.
[11] 王迪伟,叶玮. 基于无人机航空影像进行外业调绘探讨[J]. 中国商界(上半月),2010(07):370-371.
[12] 丁萌,魏丽,王帮峰. 无人机空中加油过程中基于机器视觉的相对位姿估计[J]. Chinese Journal of Aeronautics,2011,24(06):807-815.
[13] WU W Q,WANG X G,XU D,YIN Y J. Position and orientation measurement for autonomous aerial refueling based on monocular vision [J]. International Journal of Robotics and Automation, 2017:13-21.
[14] 孙罡. 低成本微小型无人机惯性组合导航技术研究[D]. 南京理工大学,2014. .
[15] 邓荣军. 基于GPS导航无人机巡线指挥系统设计[D]. 武汉科技大学,2015.
[16] 胥正烁. 基于计算机视觉技术的无人机自动导航的思考[J]. 电子制作,2018(Z1):115-116.
[17] 刘新华. 基于视觉的无人机自主着陆姿态检测方案[A]. 中国自动化学会智能自动化专业委员会. 2003年中国智能自动化会议论文集(上册)[C]. 中国自动化学会智能自动化专业委员会:2003:5.
[18] 刘畅,杨良军,刘峰,等. 一种基于惯性/视觉信息融合的无人机自主着陆导航算法[J]. 导航定位与授时,2016,3(6):6-11.
[19] 周辉. 无人机输电线路巡检可见光拍摄方法研究[J]. 中国新技术新产品,2015(18):9-10.
[20] 王昌. 基于模拟无人机平台的油菜和杂草图像处理及分类研究[D]. 杭州:浙江大学,2016.
[21] 邱帅,周思宇,冯俊青. 机器视觉技术在植保无人机中的应用[J]. 科技风,2017(13):17-18.
[22] 贾其臣. 基于视觉无人机动态监控系统人流量检测方法研究[D]. 长春:长春工业大学,2017.
(责任编辑:江 艳)
