社区应急疏散动态协作调度优化研究
2019-05-15张佰尚范刚龙贾玉奎尹如法
张佰尚,范刚龙,唐 攀,贾玉奎,尹如法
(1.洛阳师范学院河南省电子商务大数据处理与分析重点实验室,河南 洛阳 471934;2.国家市场监督管理总局发展研究中心,北京 100088;3.暨南大学应急管理研究中心,广东 广州 510632; 4.中国建筑科学研究院有限公司建筑机械化研究分院,河北 廊坊 065000)
1 引言
近些年,质量安全、自然灾害、公共卫生等突发事件的频繁发生给社区应急疏散调度带来巨大挑战[1]。这使社区应急疏散调度优化成为一项亟需解决的课题。
应急疏散调度的主要目的为突发事件发生后,应急决策人员制定科学合理的应急疏散调度方案,确保在最短的时间、以最小的成本将尽可能多的受灾居民疏散到安全场所,主要包括运输工具指派、疏散路径选择、应急疏散场所分配等问题,属于应急调度的科学范畴[2,3]。目前,应急疏散调度建模方法包括分析方法和仿真方法两类。其中,分析方法为应急响应产生最优疏散方案,其所要达到的疏散目标主要包括以下几个方面:第一,疏散人群数量最大。该目标关系到灾民的人身安全,为应急疏散的首要目标,并经常与其他一些决策目标一起构成多目标应急疏散模型,如孟永昌等[4]综合考虑了应急疏散的时效性、经济性和安全性,将疏散流量最大与疏散路线最短、运输可靠性最高一起作为疏散目标,构建了多目标优化模型。第二,疏散时间最小。该目标在非常紧急的情况下显得尤为重要,以避免发生更大的损失,如马毅和严余松[5]通过构建理想疏散时间流和保守时间流问题的模型,提出了增广路算法,获取了最好情况下和最坏情况下疏散所需总时间。第三,疏散成本最小。由于应急疏散需要调动大量的人员和资源,涉及到成本问题,所以应急疏散调度优化还需要考虑到疏散成本最小的目标。霍良安等[6]将应急疏散费用和应急疏散时间作为决策目标,并根据这两个指标建立了负效用函数,进而建立了既能满足应急需求又能满足费用最小化的规划模型。 第四,疏散路径最短。寻找最优疏散路径也是应急疏散需要研究的一个重要问题。这是因为疏散路径越短,应急疏散所需时间也越短,同时应急疏散的车辆运行时间也会缩短,运输成本随之下降。如刘亚磊等[7]根据路网中有通行容量及条件限制的节点和路段特征,提出了容量限制节点的表征方式及流量计算方法和分类路径规划方法,以弥补Dijkstra算法在应急疏散规划中可用性差的缺陷。唐炉亮[8]考虑到道路实时速度和路面状况等影响道路疏散能力的因素,建立了多集结点多安置点的最优疏散模型。仿真技术也是一种有效解决疏散规划的方法。Wolshon[9]从疏散预警、需求建模、路径选择、交通指派等方面给出了较为全面的疏散仿真方法。Chiu和Mirchandani[10]强调实时反馈信息对于应急疏散仿真系统的重要性,并根据实时反馈信息定时为车辆提供运行指导。Balakrishna等[11]认为应急情景对仿真系统的决策具有重要影响,并提出了不同应急情景下应急疏散仿真系统的框架。苑盛成等[12]针对突发事件演化模型不明确,不确定性高的特点,提出了基于实时数据的应急交通疏散仿真方法,通过融合仿真模型和数据分析技术,使仿真系统能够兼容常态与非常态仿真计算。吴薇薇和宁宣熙[13]通过随机流动仿真实验找出不同改造对网络饱和流的概率分布影响,并使用网络期望流通值与随机饱和流的偏方差值对改造方案进行比较研究。
突发事件中存在着许多动态信息,这些动态信息主要包括加载到疏散路网中的受灾人员数量的动态变化,道路通行能力的动态变化和车辆可用性的动态变化。应急疏散调度中的动态信息在很大程度上会影响应急疏散调度决策。高明霞[14]认为集结点疏散车辆的发车频率、路线和交叉口控制参数等的变化会对疏散效率产生重要影响。Li和Ozbay[15]认为潜在风险很有可能打破系统的稳定性而使应急疏散环境发生改变,进而衍生出不确定性。其根据潜在风险构建了随机动态交通分配模型。Miller-Hooks和Sorrel[16]认为路网的通行能力是随时间变化的离散随机变量,并在此环境下以疏散人员最多为目标构建了应急疏散模型。Yazici和Ozbay[17,18]认识到道路的通行能力与台风、地震等自然灾害的演化及危害程度具有关联关系,这造成了道路通行能力的不确定性,并据此提出了最优动态交通分配模型。Ng和Waller[19]研究了疏散人员过多而运力不足的情况下的应急疏散问题,并将运力满足疏散需求的程度以概率形式表现出来,进而提出了一个可靠性规划模型。同时,其也研究了随着突发事件进展,受灾居民数量动态变化时的可靠性规划的建模问题。
由上文可知,社区应急疏散的动态性对应急疏散调度优化具有重要的影响作用,其中,疏散居民数量的动态变化是影响疏散调度优化的首要指标。突发事件发生后,由于突发事件类型、社区结构布局、应急响应速度、居民数量及结构等具有较大差别,所以突发事件发生后的一段时间内加载到路网中的灾民数量呈现动态变化,并且不同时刻加载到路网中的灾民数量具有随机性,而灾民数量的动态变化直接影响着应急交通工具的需求及疏散路径的选取[20-21]。同时,为了提高疏散效率,社区应急疏散往往需要多种应急疏散方式协作完成。但是,目前的研究没有考虑随着时间变化加载到路网中灾民数量的动态性和随机性,而仅仅将加载到路网中的灾民数量视为一个具有静态特征的确定值。这有背社区应急疏散灾民数量动态性和随机性的实际情况,不利于正确开展应急疏散规划决策。本文的主要贡献在于提出了社区应急疏散动态协作调度优化流程,并在广义S型加载曲线的基础上构建了社区应急疏散动态协作调度优化的多目标随机机会约束规划模型。同时,为了获取更好的寻优效果,本文使用轮盘赌和精英选择策略相结合的个体选择方法和自适应遗传算子对遗传算法(genetic algorithm, GA)进行了改进,丰富了多目标遗传算法(multi-object genetic algorithm, MOGA)的理论和求解方法。
2 问题描述
社区应急疏散调度优化的目标为突发事件发生后,应急决策人员根据受灾居民区、交通运输工具、城市道路和应急疏散场所等情景指标制定运输调度方案,以期将受灾居民安全送达应急疏散场所。通常情况下,社区应急疏散应保证疏散居民最大化和疏散成本最小化两个目标。
(1)疏散灾民数量最大化。该目标是社区应急疏散的核心目标,也是衡量应急疏散效果的重要指标。由于各个应急疏散场所所能收纳的居民数量不同,所以应急疏散调度优化需要确定灾民的数量。
(2)疏散成本最小化。在保证最大数量地疏散灾民的前提下,最大限度地减少疏散成本也是社区应急疏散调度优化需要达到的重要目标。社区应急疏散调度优化包括运输工具调度、运输路径选择和应急疏散场所指派,涉及人员、车辆较多。这就涉及到资源有效利用的科学问题,需要做到应急疏散成本最小化。
社区应急疏散调度优化需要根据灾民、运输工具、疏散路径、应急场所等情景指标进行合理规划。其中,应急疏散调度人员可以根据交通部门、市政部门等准确地获取某一时刻运输工具、疏散路径、应急场所的情景指标。但是,加载到路网中的受灾居民数量具有明显的动态性,这使应急疏散调度决策需要根据时间变化进行调整。
根据以上情况,本文针对加载到路网中灾民数量的动态性和随机性,以疏散人员最大化和疏散成本最小化为目标,构建了多目标的应急疏散协作调度优化动态模型,以期为具有动态性的社区应急疏散调度优化提供决策支持。
3 社区应急疏散动态协作调度优化建模
3.1 社区应急疏散动态协作调度优化流程
TansModeler以地理信息系统为基础,采用较为先进的交通行为仿真模型,为交通规划及疏散仿真提供决策支持[22]。本文借助TansModeler在交通行为仿真中的优势,通过仿真获取应急疏散动态需求和动态路径通行状况,建立多目标规划模型,完成社区应急疏散动态协作调度优化,具体流程见图1。
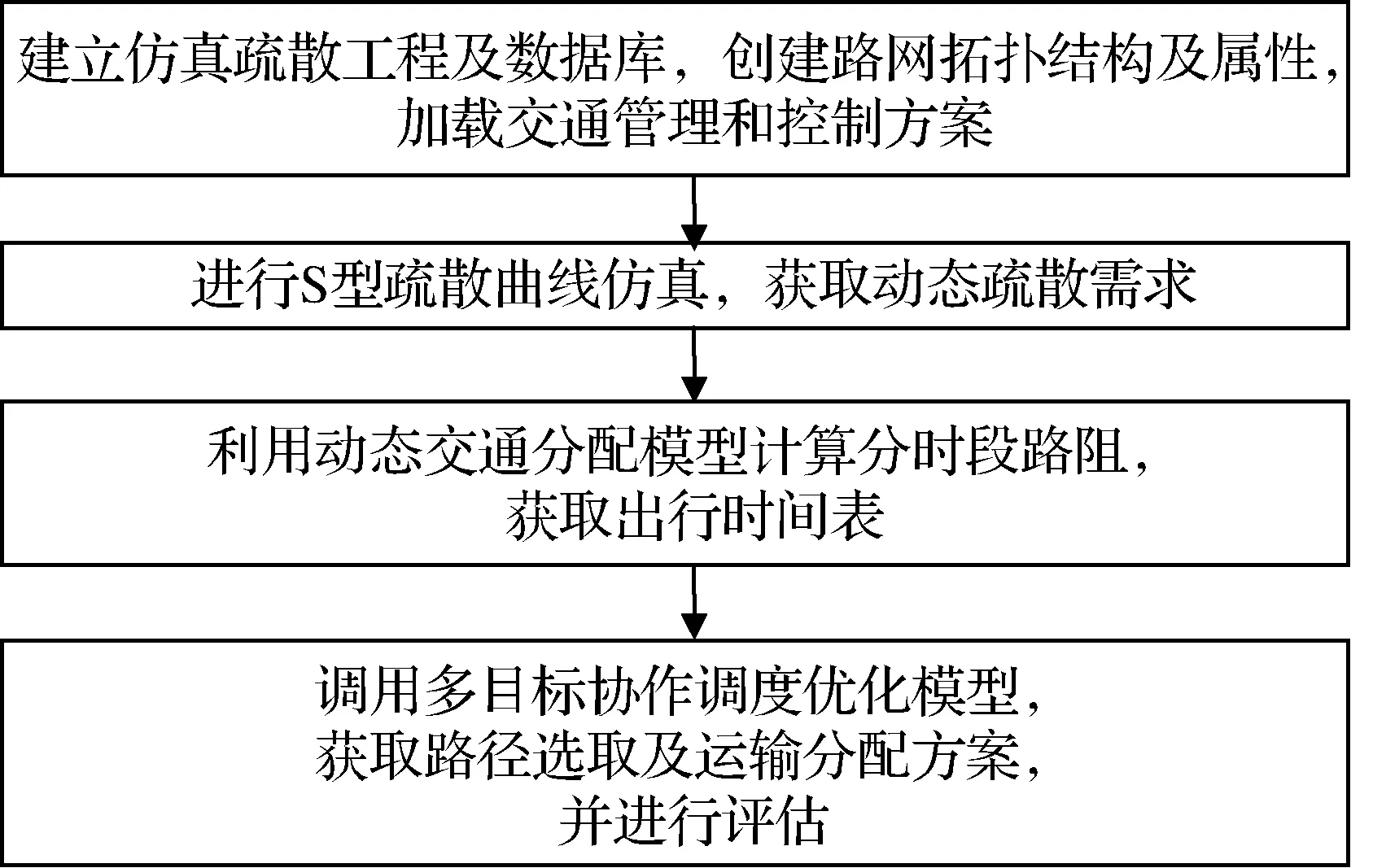
图1 社区应急疏散动态协作调度优化流程
3.2 广义S型需求加载模型
由于应急响应能力、社区总体布局、受灾人员对灾害的反应能力不同等原因,突发事件发生后需要疏散的灾民数量呈现动态变化的特点。而S型行为反应曲线则可以用于突发事件发生后加载到路网中疏散需求量的计算。在社区应急疏散中,不妨设共有m个受灾社区A1,A2,…,Am,每个社区需要疏散的灾民总数分别为a1,a2,…,am,第i个疏散社区疏散命令下达时刻和预计疏散持续时间分别为γi、θi,则其疏散需求加载时间为γi+θi,那么疏散居民全部加载到路网中的S型反应曲线可以用式(1)表示,其中t为分析时间点;αi表示疏散人群对突发事件的反应速度的参数,决定应急交通需求加载到路网中的速度,通常根据历史数据使用最小二乘法确定;H为待疏散人员的一半人员加载到路网中所需的时间,若已知疏散持续时间,则可取持续时间的一半而估算[23]。
P(it)
(1)
需要指出的是,最小二乘法的核心思想为保持所有数据偏差平方和最小,见式(2)。其中,xi、yi分别为样本的自变量和因变量,f(xi)为拟合的从xi到yi的函数关系,E为观测到的样本值与拟合模型结果偏差平方和。因此,模型的拟合效果可以使用式(3)进行测度。
(2)
(3)
假设m个受灾社区应急疏散的紧急程度为A1>A2>…>Am,那么则有γ1<γ2<…<γm,应急疏散时间段为T∈[0,max(γi+θi),总的需疏散灾民数量为A=∑ai,而系统的广义S型加载曲线可以表示为式(4),其模拟效果可以使用式(5)表示[24]。
(4)
(5)
3.3 社区应急疏散动态协作调度优化模型
为了更好的描述动态环境下社区应急疏散协作调度优化问题,本文提出的数学模型具有如下前提:
(1)各个受灾点需要疏散的各类受灾人群数量可以提前确定。
(2)应急避难场所及可以容纳的各类受灾人群的数量可以提前获取。
(3)应急疏散过程中单个运输工具仅参与一次运输。
(4)各个疏散路径的长度及通行时间可以提前获取且各个运输路径不相互影响。
为了建立规划模型,本文设i,l,j分别代表受灾点、运输方式、应急疏散场所,并定义了以下符号:
(2)Vl:第l种运输工具单位运输成本。
(3)Cl:运输方式l单个运输工具载客。
(4)ai:第i个受灾点受灾人员数量。
(5)bj:第j个应急疏散场所可以容纳的受灾人员的数量。
(6)nil:第i个受灾点可支配的运输工具l 数量。

社区应急疏散调度优化需要在保证疏散灾民数量最大化的前提下,最大限度地减少疏散成本,其规划模型见式(6)。
其中,第一个目标函数表示从受灾点i使用运输方式l输送到应急疏散场所j的灾民数量最大化;第二个目标函数表示将灾民从受灾点i使用运输方式l输送到应急疏散场所j的成本之和最小化。第一个约束条件表示所疏散的灾民数量不大于各个受灾点灾民数量;第二个约束条件表示所疏散的灾民的数量不大于各个应急疏散场所能容纳的灾民的数量;第三个约束条件表示各个受灾点所疏散灾民的数量不大于该受灾点可支配的l种交通工具可运送灾民的数量。
(6)
4 基于改进多目标遗传算法的随机机会约束规划求解方法
通常情况下机会约束规划求解方法包括转化为确定性规划问题进行求解和借助智能算法进行求解两种方法。但是,前者通常需要机会约束规划问题满足复杂的条件,应用经常收到限制。鉴于此,本文借助智能算法对机会约束规划模型进行求解。同时,为了避免遗传算法(genetic algorithm, GA)的早熟及收敛慢的缺点,本文对MOGA进行了如下改进:在种群的选择方法中,本文采用轮盘赌和精英选择策略相结合的方法来选择染色体,既保证了优良个体,又保持了种群的多样性;在交叉和变异过程中,本文采用自适应交叉算子和变异算子保证算法的交叉概率和变异概率随着遗传代数而自动调整,以避免算法陷入局部最优。
(1) 产生初始种群 GA的编码方法包括:实数编码、二进制编码、格雷编码、符号编码等编码方法。考虑到实数编码具有占用存储空间小、效率高等特点,本文使用实数编码方法进行编码,并定义pop_size为染色体个数。在规划模型的可行域随机产生一个点并检验其是否满足约束条件要求。若该点满足约束条件要求,则将其作为一个染色体;否则,则产生另一个点并进行检验。经过多次选取,本研究获取pop_size个可行点。
(2)选择 GA中种群的选择方法对GA最优解的全局性和个体多样性有重要影响。考虑到仅使用轮盘赌方法选择染色体会导致优良个体的损失,而仅采用精英策略选择染色体会减小群体的多样性,本文采用轮盘赌和精英选择策略相结合的方法对染色体进行排序和选择[25,26],具体操作步骤如下:
1)个体按适应度值大小排序。
2)求平均适应度,以此为阈值,选择适应度值大于平均适应度值的个体。
3)判断相似度(如果两个个体中在相对应的位置上存在着相同的字符,则将相同字符数量定义为相似度),以最高适应度值为模板,去除相似个体。
4)逐次以适应度高的个体为模板,选择不同模板的个体组成群体。其中排在前面的个体复制两份;中间的复制一份,后面的不复制。
5)判断是否达到群体规模。如果达到了种群规模,则进行下一步交叉、变异等操作;如果不能达到种群规模,则需要按照以下方式补全种群规模:如果种群数量大于种群规模,则去掉复制两份的个体中的一个(从适应度低的开始),直到种群数量达到要求;如果种群数量小于种群规模,则加入去除的相似个体(以适应度高的开始),直到种群数量达到要求。
(3) 交叉 目前的MOGA在进行交叉操作时没有考虑到最优适应度函数会随着进化代数而变化的情形,这削弱了其性能。本文使用自适应遗传算子来弥补这一缺陷,见式(7)。
(7)
(4)变异 同样,目前的MOGA的变异算子也存在同样问题。本文使用式(8)选择变异概率。
(8)
(5)停止条件 本文使用停滞策略作为算法的停止条件。当连续400代无进化时,算法即停止。
5 算例
5.1 具体问题
为了验证本文提出的模型的有效性和准确性,本文设计如下算例进行验证。假设1个社区受到火灾影响而需要将社区居民疏散到5个不同的应急疏散场所。由相关部门的汇报和记录资料可以获取当前应急疏散的一些情景指标,其中社区居民、可用运输工具的情况见表1; 5个不同应急疏散场所所能容纳的受灾居民数量见表2。为了计算方便,Ⅰ型客车平均载客量按照40计算,Ⅱ型客车载客量按照20计算,Ⅰ型客车单位时间运行成本为Ⅱ型客车单位时间运行成本的1.2倍。该疏散过程预计持续45分钟,疏散命令下达时刻为突发事件发生后15分钟。
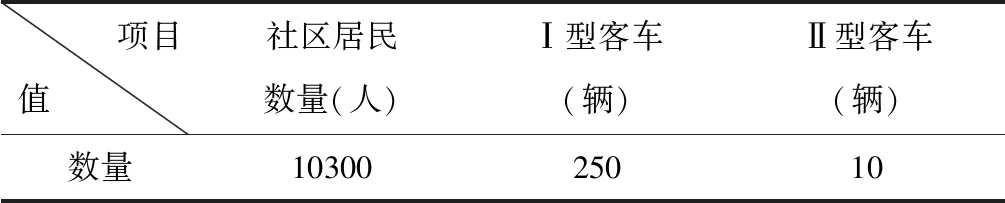
表1 受灾社区居民分类及运输工具统计数据

表2 应急场所容量(单位:人)
5.2 结果分析
本文根据图1的仿真流程进行以下步骤的仿真决策分析:系统根据社区应急疏散情景创建疏散路网拓扑结构,其中路网含有一个源点、五个终点且五个终点分别与源点连接;使用最小二乘法估
算社区居民灾害反应系数αi为0.45,其可信性为0.95并使用Matlab对该社区应急疏散进行S型需求曲线仿真,获取不同时刻社区应急疏散需求,见图2。
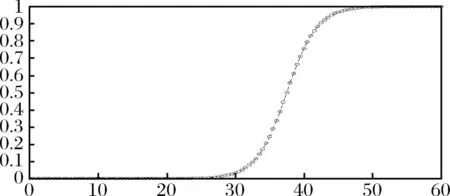
图2 社区应急疏散S型仿真曲线

表3 车辆运行时间表(单位:分钟)
为简便起见,本文获取了突发事件发生后35分钟时和40分钟时的社区应急疏散需求分别为2525和7776。接下来,系统使用动态交通分配程序计算BPR分时段路阻[22],获取出行时间表,具体公式见式(9)。
(9)

(10)
其他出行时间的计算方式同上,为简便起见,本文仅给出突发事件发生后35分钟时和40分钟时的历史出行时间表。由于Ⅰ型客车较大,无法在较窄的后五条路径通行,所以其在后五条路径运行时间为0,所以本文获得了不同车型疏散路径运行时间表,见表3。最后,系统根据获取的动态交通需求和历史出行时间表,调用多目标协作调度优化模型提供疏散车辆调度及路径选取等决策。
系统分别对ti=35和ti=40时的协作调度优化进行了仿真计算,获取了这两个时刻加载到路网中的灾民数量分别为2525人、7776人。为了检验MOGA的全局寻优效果,本文分别使用MOGA与GA对ti=35进行了仿真,获取了不同算法下寻优结果,见图3和图4。
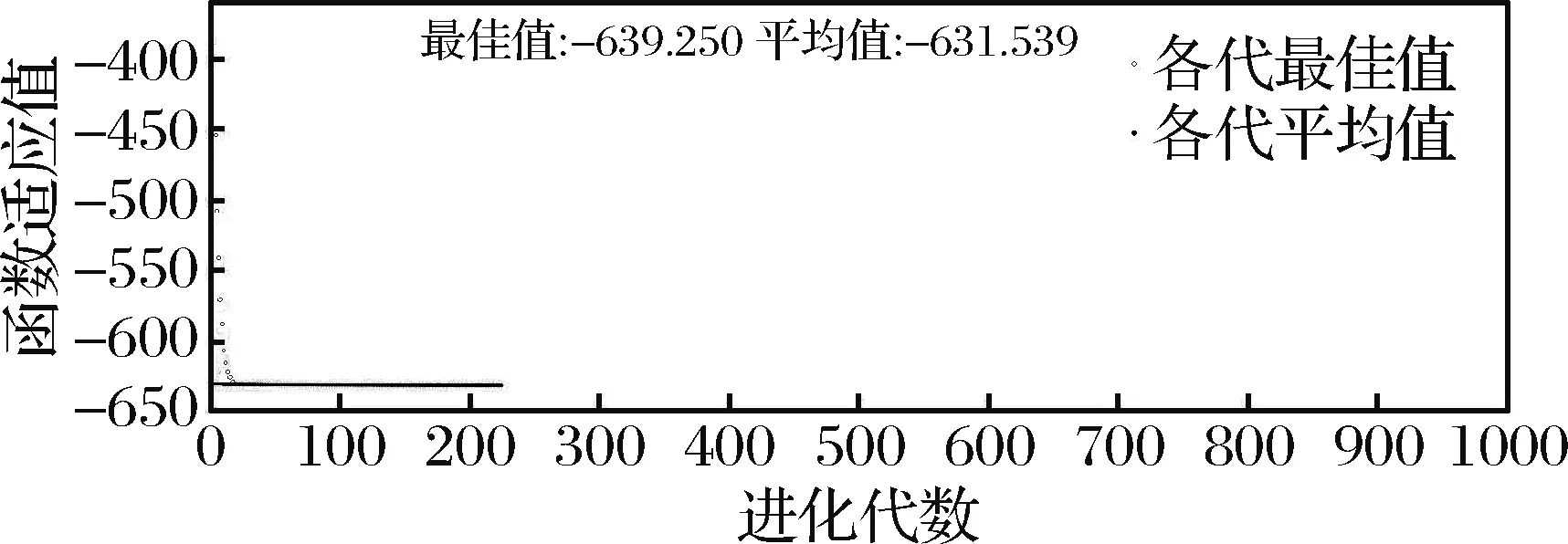
图3 MOGA寻优性能

图4 GA寻优性能
从图中可以看出,MOGA在进化到大约230代时达到最优状态,获取的全局最优值为-639.25,此时应急疏散的成本为1246.5,而GA在进化到1000代时才达到最优状态,获取全局最优值-543.276。可见,相比GA而言,MOGA能在更短时间内达到稳定状态,并获取比GA更优的全局值。这说明MOGA在求解该类问题中具有更优的寻优性能。
系统调用多目标协作调度模型获取了ti=35和ti=40时响应的协作调度方案,见表4和表5。由图像和表格可以看出,社区应急疏散中不同时刻具有不同的疏散需求和不同的出行时间表。这也导致不同时刻的协作调度优化具有不同的决策方案。本文提出的方法可以根据疏散需求和路网通行时间有效的进行交通工具配置和路径选择。

表4 ti=35时居民疏散方案(单位:人)

表5 ti=40时居民疏散方案(单位:人)
6 结语
社区应急疏散往往需要多种运输方式协作完成疏散任务,并且加载到路网中的灾民数量和路网通行时间具有明显的动态性。本文针对灾民数量和路网通行能力的动态性,提出了社区应急疏散动态协作调度优化流程,并以疏散成员最大化和疏散成本最小化为目标构建了多目标协作调度优化模型,设计了多目标随机规划模型的MOGA,最后使用Tansmodeler进行验证。结果显示,不同时刻加载到路网中的灾民数量和路网通行时间具有动态性,这使协作调度方案具有明显不同,而本文提出的模型和算法可以为社区应急疏散交通工具配置和路径选取提供有效决策。
致谢:本文受到洛阳师范学院河南省电子商务大数据处理与分析重点实验室和暨南大学应急管理研究中心资助,在此表示感谢!
