MEMS惯性传感器研究现状与发展趋势*
2019-04-26李晓阳王伟魁汪守利彭泳卿金小锋
李晓阳,王伟魁,汪守利,彭泳卿,金小锋
(北京遥测技术研究所 北京 100076)
引 言
MEMS即微机电系统[1],集微型传感器、执行器、信号处理与控制电路、接口电路、通信和电源于一体,是随着半导体集成电路微细加工技术和超精密机械加工技术的发展而发展起来的。
MEMS最早是在上个世纪八十年代被提出的,并在其后逐渐被广泛接受。斯坦福大学等最早开始了MEMS领域的研究开发工作。其后,佐治亚理工等众多大学也都建立了自己的MEMS工艺线,同一时间也开展了MEMS设备、仪器的开发工作,以用来支撑理论工艺技术研究。同时,各高校及科研单位相互之间也在不断地进行技术与业务方面交流,促进了MEMS技术及时转化成产品。据美国国防部预测,到2020年美军90%的制导武器将采用MEMS惯性传感器[2],如图1所示。MEMS惯性传感器主要包括MEMS陀螺仪、MEMS加速度计、MEMS磁力计及MEMS-IMU等五种,本文将对以上几种惯性传感器的研究现状进行介绍,并根据发展现状对发展趋势进行展望。
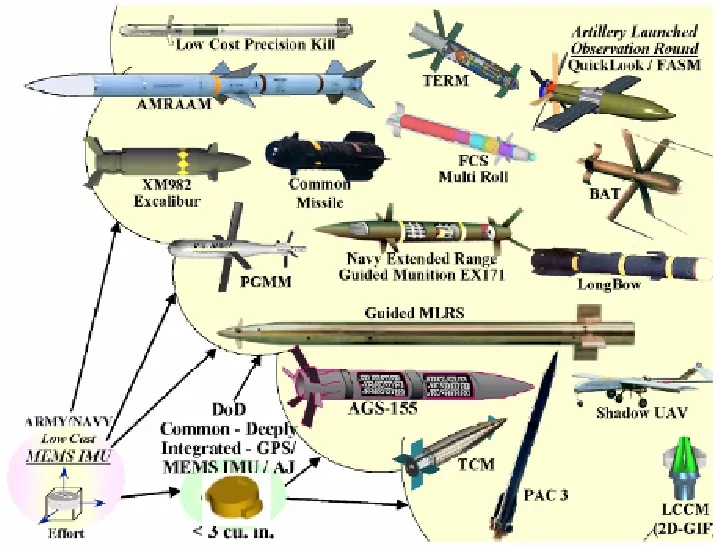
图1 2020年美军90%的制导武器将采用MEMS惯性传感器Fig.1 About 90% guided weapon will use MEMS inertial sensors by 2020 in U.S.army
1 MEMS陀螺仪研究现状
MEMS陀螺仪利用科里奥利力(Coriolis force,又称为科氏力)原理把角速率转换成一个感应器电容极板的位移,是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述[3]。
MEMS陀螺仪可以从振动结构、材料、加工方式、驱动方式、检测方式和工作模式等几个方面进行分类[4],如图2所示。
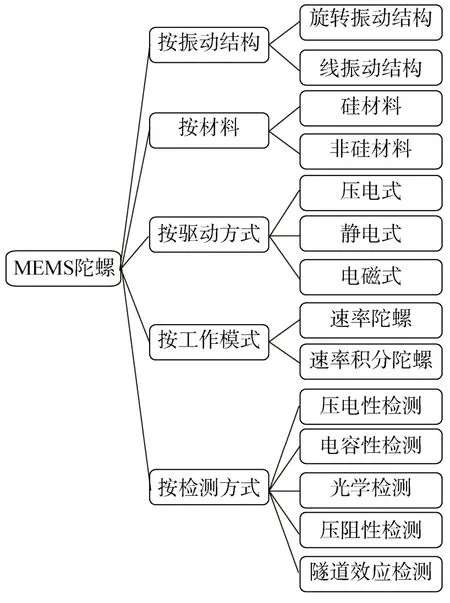
图2 MEMS陀螺分类Fig.2 MEMS gyroscope classification
1.1 MEMS陀螺仪国外发展现状
国外对于MEMS陀螺仪的研究最早始于二十世纪八十年代,美国、日本及欧洲各国均耗巨资进行了相关技术方面的开发和研究,研究水平走在世界前列。国外从事MEMS陀螺仪方面研究的机构包括Draper实验室、SAGEM公司、意法半导体等[5]。
1.1.1 音叉陀螺
美国BEI公司的石英音叉陀螺技术研究方面已十分成熟,形成了不同精度等级、适应不同应用领域的系列产品,如LCG50、Horizon、QRS11、QRS116等。其中QRS116是QRS11的升级版,零偏稳定性优于3(°)/h,全温范围零位漂移优于20(°)/h,如图3所示[6]。

图3 QRS116音叉陀螺Fig.3 QRS116 Tuning fork gyroscope
1.1.2 轴对称陀螺
①MEMS 谐振环陀螺VRG(Vibrating Ring Gyroscope)
MEMS谐振环陀螺源于石英半球谐振陀螺,是半球谐振陀螺的简化结构形式。与半球谐振陀螺相比,除了保持半球谐振陀螺敏感结构全对称、高精度、环境适应性好、适合应用在性能要求高并且环境恶劣的航天及军事等领域的特点之外,还具有结构简单、可靠、体积小、便于批量化集成制造等特点。目前,谐振环陀螺已经发展到第四代产品,逐渐从机械陀螺转变为MEMS硅基陀螺[7],如图4所示。

图4 谐振环陀螺发展历程Fig.4 Evolution progress of VRG
日本硅传感系统公司SSS(Silicon Sensing Systems)一直从事MEMS谐振环陀螺研制,最新产品零偏稳定性<0.06(°)/h,角度随机游走ARW<0.01(°)/h,是目前MEMS谐振环陀螺的最高水平[8]。美国在DARPA导航级集成微陀螺仪(NGIMG)项目的支持下,在谐振盘陀螺研制方面取得了突破性进展,基于8mm直径硅材料的谐振盘陀螺实现了零偏稳定性优于0.01(°)/h,角度随机游走优于0.002(°)/h。
②MEMS 碟形陀螺DRG(Disk Resonator Gyroscope)
AMIR R等设计制造了一种迄今为止报道的最小MEMS陀螺仪——单晶硅体声波陀螺仪[9]。该陀螺具有强大的抗干扰性能和超过6000(°)/s的大动态范围,ARW为1(°)/h,零偏不稳定性为15(°)/h。
③MEMS 半球谐振陀螺HRG(Hemispherical Resonator Gyroscope)
诺格公司提出通过软件对科里奥利振动陀螺仪进行动态自校准的方法[10],大幅简化生产部件,小尺寸的毫米半球谐振陀螺仪可确保0.00025(°)/√h的角度随机游走和0.0005(°)/h的零偏稳定性。
2017年,美国密歇根大学对利用吹泡法制备的微玻璃吹制型m-HRG样机进行了测试[11],其Q值为0.42×106,零偏稳定性为0.0391(°)/h,Q值最高可达4.45×106,如图5所示。密歇根大学在2019年研制的弧面驱动陀螺样机在陶瓷管壳封装后的品质因数达到了150万,在常温下零偏不稳定性为0.0103(°)/h,已接近导航级精度,是目前精度最高的微陀螺之一[12]。
1.1.3 其他陀螺
2019年,加州理工学院展示了一种纳米光子光学陀螺NOG(Nanophotonic Optical Gyroscope),如图6所示[13]。实验结果表明:在10MHz时,热波动不可见,BIS=1rpm,ARW=650(°)/√h。在20MHz时,热波动非常明显,BIS=105rpm,ARW=97800(°)/√h。
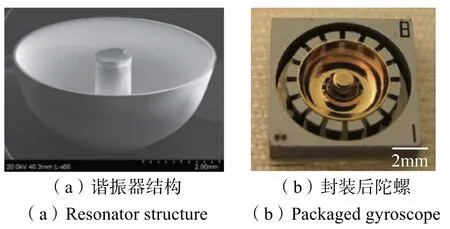
图5 融石英半球陀螺Fig.5 Quartz hemisphere gyroscope
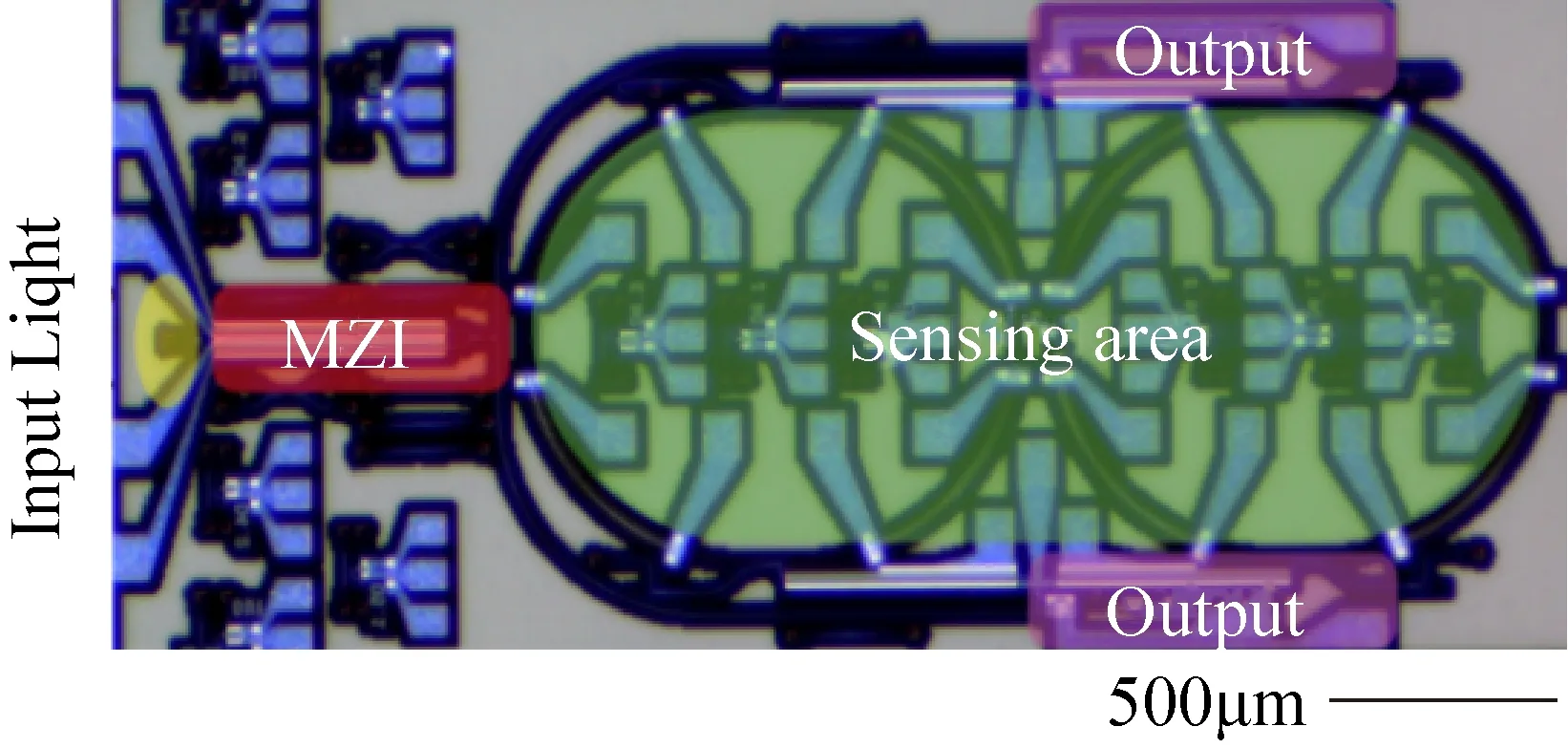
图6 NOG结构Fig.6 Structure of NOG
1.2 MEMS陀螺仪国内发展现状
我国MEMS陀螺仪的研究起源于二十世纪八十年代,国家投入了大量经费进行MEMS陀螺仪方面的研究。参研单位主要有清华大学、上海交通大学、中北大学等高校以及中科院上海微系统所、中电13所、中电26所、航天33所、航天704所等研究所[14]。
1.2.1 音叉陀螺
哈尔滨工业大学付强等采用双片集成方式,设计了一款实用化的MEMS陀螺接口电路[15]。测试结果表明,陀螺整机量程为±200(°)/s,带宽为60Hz,刻度因子为46.45LSB/((°)/s),线性度为342×10-6,输出噪声为0.004(°)/s/√Hz,零偏稳定性为3.4(°)/h。
中国航空工业集团公司西安飞行自动控制研究所提出了一种双质量块音叉式MEMS陀螺[16],如图7所示。该陀螺采用键合+刻蚀工艺(BDRIE)加工而成,通过圆片级封装工艺技术,实现了高真空度密封,品质因数优于25万。外围电路采用数模混合集成电路实现,保证了陀螺形态的紧凑。其中驱动模态采用闭环控制方案。经测试,该陀螺零偏稳定性优于0.66(°)/h,刻度系数非线性优于100ppm,零偏加速度灵敏度优于12.3(°)/(h/g),能够满足绝大部分战术武器应用需求。
中国电子科技集团13所设计了一种用于MEMS陀螺仪驱动闭环的专用集成电路[17]。测试结果表明,谐振频率为3.7kHz,启动时间≤0.3s,驱动检测信号的信噪比达到了115dB,驱动振幅1h稳定性为1.5×10-4。
南京理工大学提出了一种具有低振动灵敏度和宽动态范围的MEMS陀螺仪[18],如图8所示。该陀螺体积为11.4mm×11.4mm×3.8mm。试验结果表明,测量范围为±7200(°)/s,零偏稳定性为12.2(°)/h(1σ)。随机振动下(7.6grms),该陀螺振中零偏变化量小于10.0(°)/h,振中零偏稳定性小于24.0(°)/h。
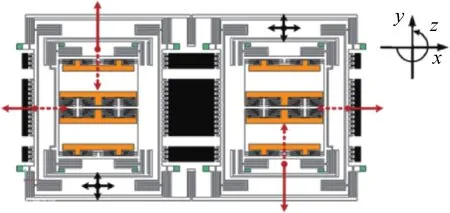
图7 音叉式微陀螺结构Fig.7 Structure of Tuning fork type micro-gyroscope
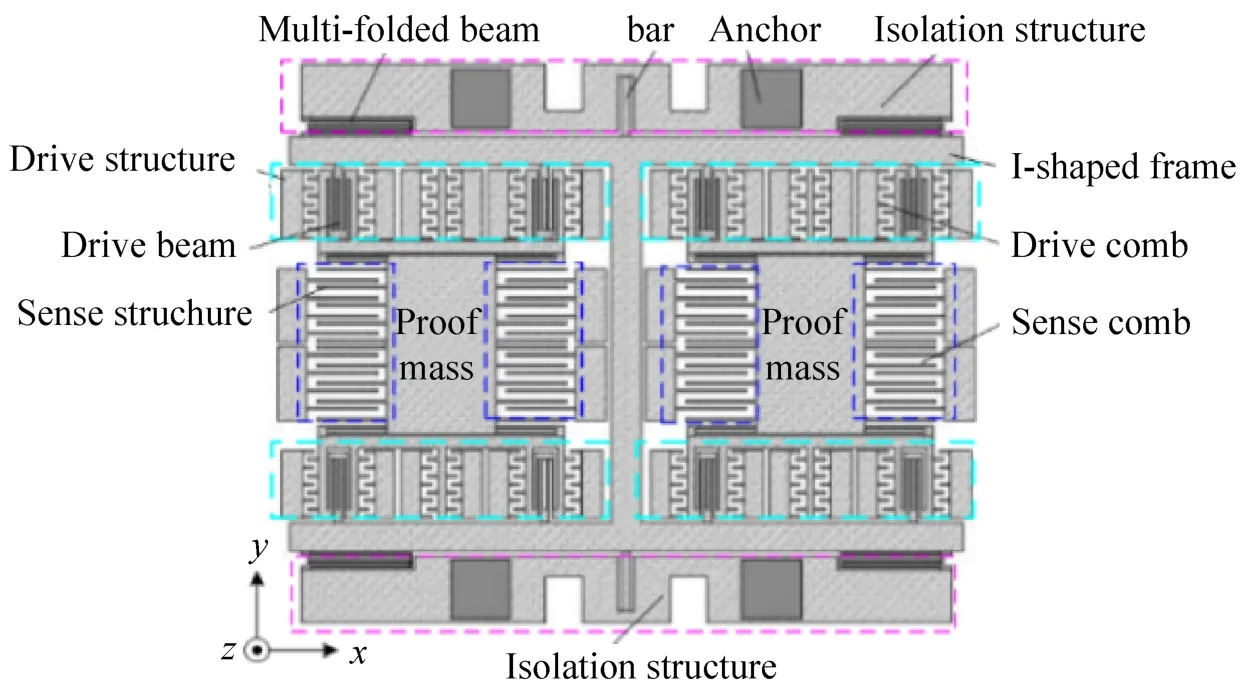
图8 MEMS陀螺仪结构Fig.8 Structure of MEMS gyroscope
1.2.2 轴对称陀螺
①MEMS 谐振环陀螺
国内某研制单位于2008年开始硅基MEMS谐振环陀螺的研制,2015年,该单位自主研制的MEMS谐振环陀螺通过飞行测试,发射过载8000g,历时10ms,抗过载能力优良,标志着我国MEMS陀螺在抗高过载方面取得了突破性的进展。
中北大学设计了一种电容式环形微机电振动陀螺[19],如图9所示。驱动与检测模态的谐振频率分别为9028.86Hz与9036.15Hz,品质因数分别为25051与25026,标度因数为0.5897mV/((°)/s)。
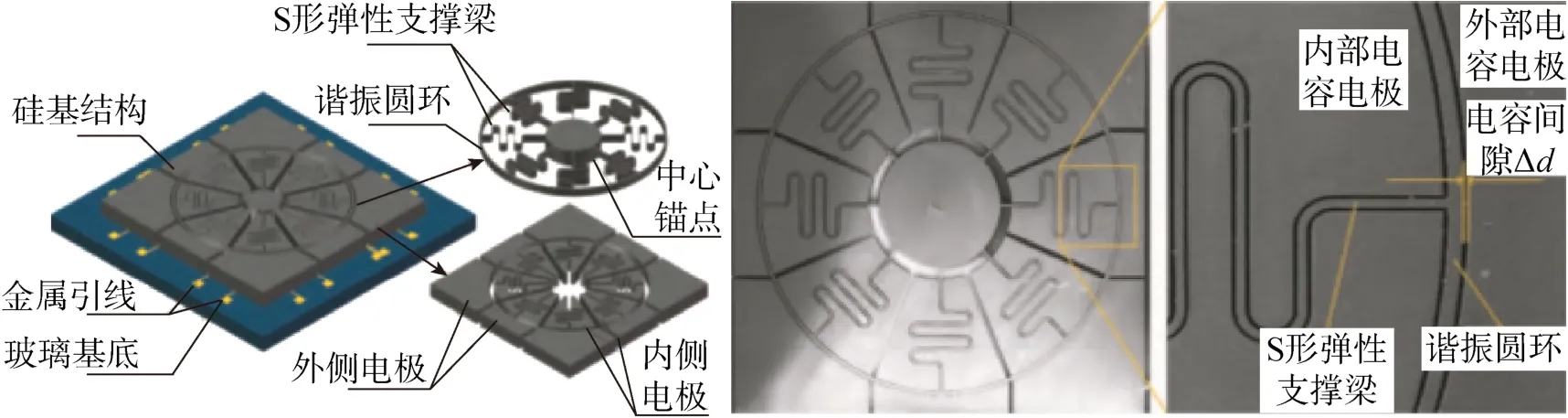
图9 MEMS环形振动陀螺结构Fig.9 Structure of MEMS ring vibrating gyroscope
②MEMS 碟形陀螺
国防科技大学设计并实现了一种热弹性质因子增强DRG[20],测试结果表明,f0=5766.5Hz,Q=157508,ARW=0.0009(°)/√h。
Fan Qi等设计并实现了一种具有力-再平衡操作模式的高性能MEMS盘式陀螺仪[21],采用了晶圆级真空封装的SOI工艺,并设计了精密数字控制处理电路,实现了正交误差抑制和频率调谐。测试结果表明,实现了0.18(°)/h的偏置稳定性(1σ)和90Hz的带宽。
Fan B等设计并实现了一种新颖的类似蜘蛛网的盘式谐振器陀螺仪[22],如图10所示。测试结果显示:蜘蛛网状碟形陀螺CDRG(Cobweb-like DRG)和环状碟形陀螺RDRG(Ring-like DRG)的共振频率和Q值分别为18kHz左右和接近100k。CDRG中最小的制造相对频率分割(29.9ppm)比同一晶片上并排构建的RDRG(322.5ppm)小约10.8倍,比例因子为98.1mV/((°)/s),ARW为0.004(°)/√h,零偏不稳定性为0.187(°)/h,为当前所有盘式谐振器中具有最低的相对频率分配陀螺仪。
③MEMS 半球谐振陀螺
苏州大学WAN Q等制作了多晶硅微半球谐振陀螺[23]。测试结果表明,在0.004Pa的真空度下,陀螺的品质因数Q为2200,初始频差为10Hz,零偏稳定性为80(°)/h。
苏州大学顾宏华设计了一套利用多通道锁相放大器快捷、有效测试MEMS半球陀螺的系统[24]。实验表明,标度因数为2.55mV/°/s,标度因数非线性度为0.066%,零偏稳定性为60.3(°)/h,零偏不稳定性为20.6(°)/h。
华北光电集成器件研究所利用脱模法制备了多晶硅微半球陀螺[25]。实验测得四波腹谐振频率为14.1kHz,Q值为10.2k,初步开环测试零偏稳定性为80(°)/h,标度因子为1.15mV/((°)/s)。
国防科技大学对MEMS半球谐振陀螺进行了一系列有益探索[26,27],最新研究成果表明,国防科技大学研制的微半球谐振陀螺样机封装后的品质因数Q值为15万,在常温下的零偏不稳定性为0.46(°)/h,量程达到±200(°)/s,是国内报道的性能最高的微半球谐振陀螺[28],如图11所示。
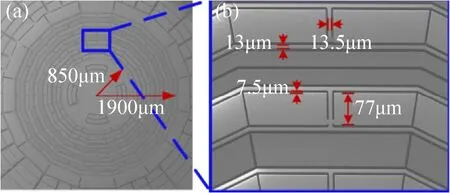
图10 CDRG结构Fig.10 Structure of CDRG
图11 国防科技大学研制的微半球陀螺样机Fig.11 μHRG developed by National University of Defense Technology
1.2.3 其他陀螺
国内在MEMS陀螺研究方面开展了硅基和石英基样机的研制,在MEMS原子陀螺、MEMS隧道磁阻微陀螺等方面正加紧原理探索和试验研究, 目前均取得了一定进展。
中北大学设计制作了一种MEMS隧道磁阻微陀螺[29],如图12所示。驱动方向和检测方向谐振频率分别是6853Hz和6854Hz,与理论仿真基本一致,驱动方向Q值为571.1,检测方向Q值为527.3,频率匹配良好,结构灵敏度为15.3nm/(°)/s。
与国外相比,我国MEMS陀螺仪的研制和开发相对比较落后,但是我国一直非常重视MEMS陀螺仪的基础理论知识研究和技术开发。经过30多年的不懈努力,我国在MEMS陀螺仪的理论、工艺、外围配置电路、应用等方面都取得了突破性的进展,但在产品体积方面还有待进一步缩小,性能指标方面也有待进一步提高。
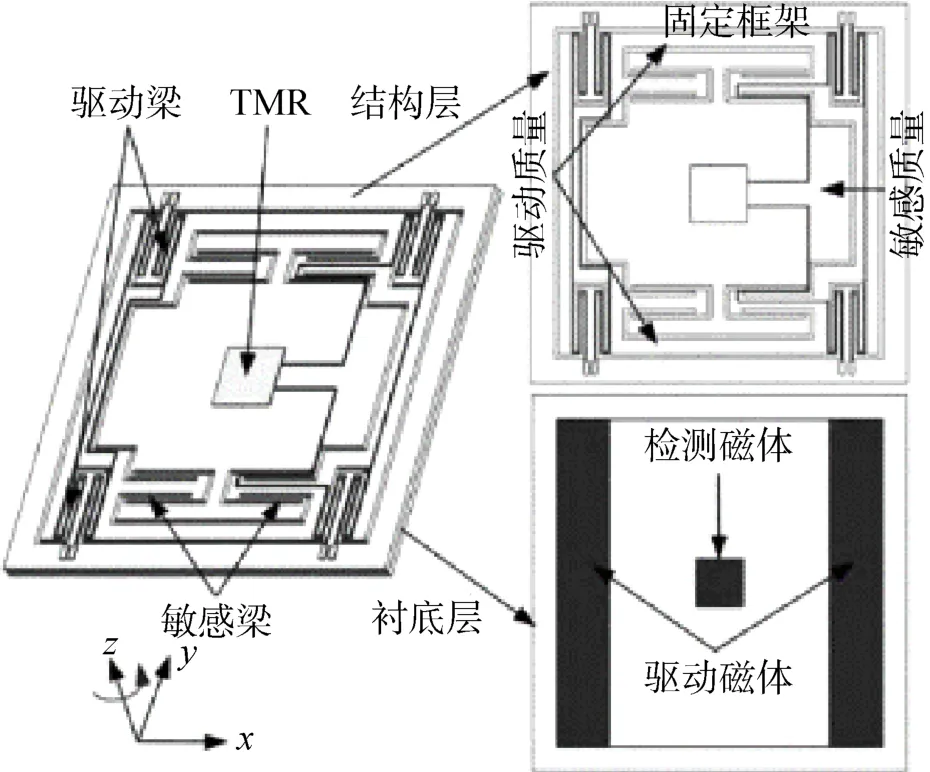
图12 隧道磁阻微陀螺结构Fig.12 Structure of tunneling magnetoresistance gyroscope
2 MEMS加速度计研究现状
MEMS加速度计可以按以下几个方面进行划分:检测方式、敏感轴数目、运动方式,如图13所示,其理论依据为牛顿第二定律[30]。
2.1 MEMS加速度计国外发展现状
2.1.1 电容式加速度计
MS1000是Colibrys专为惯性应用而设计的一种MEMS加速度计[32],如图14所示。测量范围为±10g,拥有34μg/√h的低噪声水平,长期偏差重复性为1.2mg,运行中的零偏稳定性为15μg,比例因子灵敏度为270mV/g,可用于非常精确和具有成本效益的战术级测量。
2.1.2 谐振式加速度计
①石英谐振加速度计
2018年,日本Epson公司设计制造了一种具有一阶频率ΔΣ调制器的三轴石英谐振频移加速度计[33]。该石英谐振加速度计尺寸为50mm×24mm×16mm,速度随机游走系数为6.7×10-5m/s/√h(白噪声 为0.16μg/√Hz),零偏不稳定性为6.3×10-6m/s2,测量范围为±15g,带宽为500Hz。
2019年,法国iXblue公司面向市场正式宣布推出该公司第一款满足高性能应用的导航级加速度计iXal A5[34],如图15所示。尺寸为Φ26mm×26mm,测量范围为±80g,白噪声小于10μg/√Hz,分辨率为5μg,带宽为1000Hz。
目前实现产业化的石英谐振式加速度计最具代表性的是霍尼韦尔公司的RBA500[35],如图16所示。尺寸为20mm×20mm×11mm,零偏年重复性为4mg,标度因数年重复性为450ppm,分辨率为1μg,测量范围为±70g,带宽为400Hz,性能优良,成熟可靠,已经应用于阿帕奇武装直升机。
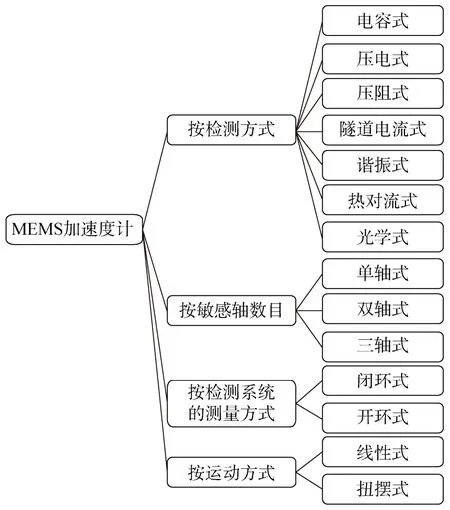
图13 MEMS加速度计分类Fig.13 MEMS accelerometer classification

图14 MS1000加速度计Fig.14 MS1000 accelerometer

图15 iXal A5加速度计Fig.15 iXal A5 accelerometer

图16 RBA500加速度计Fig.16 RBA500 accelerometer
②硅谐振加速度计
伴随企业的发展,在企业集团战略性成本管理创设中,应该将成本企划作为企业集团的重点,按照企业经营领域以及产品方向定位,进行产品成本管理方案的设计,提升企业运行的价值性。在企业成本企划的过程中,其作为一种现代性的成本管理方案,可以对企业新产品的发展进行规划,结合战略性的发展目标,进行成本管理制度的创新,为企业成本管理理念的确定提供支持。而且,在企业成本企划中,相关人员应该结合预期销售的内容,确定期望利润,明确目标的成本,并根据这些内容进行产品工艺流程、流通加工以及包装成本等问题的确定,展现企业集团成本企划工作的价值性[3]。
2017年,美国斯坦福大学研制了集成有温度测量和补偿模块的单轴谐振式加速度计,如图17所示。实验结果表明,该器件具有427Hz/g的灵敏度,该器件在-20℃~80℃温度内与未采用温补的相同器件相比零偏稳定性降低了三分之二,灵敏度稳定性提高了一个量级,并且Shin D D等人正与Apple公司和Invensense公司合作进行产业化[36-38]。
MILIND P等人设计制作了一种高分辨率的差模局部化MEMS加速度计[39]。实验结果显示,该加速度计最大比例因子为11/g,零偏稳定性为2.96μg。在最佳工作区域内,最小噪声基底为3μg/√h。
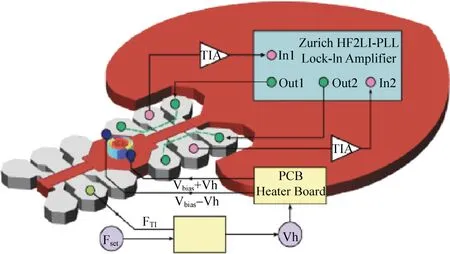
图17 斯坦福大学加速度计结构Fig.17 Structure of Stanford University accelerometer
目前实现了产业化的硅谐振式加速度计只有霍尼韦尔公司的SA500[40],如图18所示。测量范围为±80g,标度因数为168Hz/g,零偏年重复性为2.5mg,标度因数年重复性为360ppm,分辨率小于50μg,带宽大于1000Hz,主要用于战术导弹和智能炸弹等战术和惯性导航领域武器。

图18 SA500加速度计Fig.18 SA500 accelerometer
2.1.3 其他加速度计
美国佐治亚理工学院报道了一种基于使用PDMS模具的双掩模微流体工艺的生物激发角加速度计[41]。该加速度计具有固有的线性加速度不敏感性,测试结果显示,灵敏度为29.8μV/(°)/s2,动态范围为14000(°)/s2,检测限为20(°)/s2。
MAJID T设计制造了一种MEMS光加速度计[42],如图19所示。由于FP干涉仪的高位移灵敏度,可以增加弹簧的刚度,这使得该加速度计的共振频率增加到1872Hz,在±1g测量范围内达到了12.5μW/g的灵敏度。
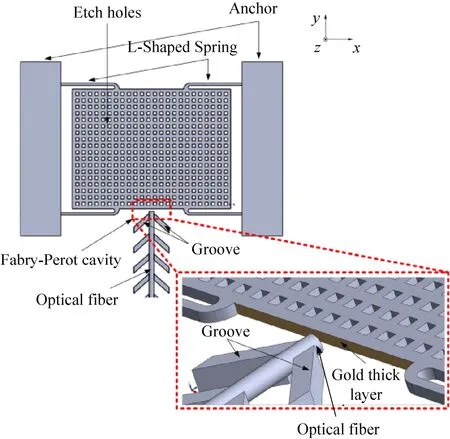
图19 MOEMS加速度计结构Fig.19 Structures of MOEMS accelerometer
2.2 MEMS加速度计国内发展现状
我国对MEMS加速度计的研究始于20世纪80年代末,代表性研发单位包括:清华大学、南京理工大学、西北工业大学、东南大学、航天33所、航天13所、航天长征火箭技术有限公司等[31]。
2.2.1 电容式加速度计
邢朝阳设计制作了一种“三明治”式MEMS加速度计[43],并完成了闭环电路设计。测试结果表明,量程大于等于±15g,偏值重复性小于等于500μg,标度因数重复性小于等于200ppm,截止频率大于等于100Hz,三个月重复性为1.5×10-3g(3σ)。该加速度计在探月二期工程“玉兔号”月球车上取得应用,在月工作超过9个月,实现了国产MEMS惯性仪表唯一深空探测应用。
上海微系统所报道了单片集成的三轴梳齿式电容加速度计[44]。该加速度计采用SOI基片加工,通过(111)硅片自停止腐蚀做出高深宽比的敏感结构。测试结果显示,X、Y、Z三个方向灵敏度分别为225mV/g、188mV/g、36.5mV/g,零偏稳定性分别为3mg、9mg、46mg,带宽分别为900Hz、900Hz、400Hz。
HU Qifang等人提出一种全硅WLP MEMS三明治式加速度计[45]。测试结果表明,该加速度闭环灵敏度为0.575V/g,零偏差为0.43g,-3dB带宽为278.14Hz,1小时稳定性为2.23×10-4g(1σ),-40℃~+60℃温度范围内输出温度漂移为45.78mg,温度滞后最大值为3.725mg。
2.2.2 谐振式加速度计
①石英谐振加速度计
中电26所加工了一种差分结构的加速度计样机[46]。测试结果显示,单个期间灵敏度大于30Hz/g,差分后灵敏度为65.74Hz/g,10min零偏稳定性为15.8μg。
东南大学设计制造了一种具有自检功能的一体式石英振梁加速度计[47]。测试结果显示,标度因数为50.5Hz/g,标度因数稳定性为61.8ppm,标度因数重复性为47.1ppm,1小时零偏稳定性为24.38μg。
Jian Yang等公布了一种T型MEMS谐振加速度计[48]。加速度计尺寸为464μm×650μm,静态时的谐振频率为16.10925 kHz,感应轴灵敏度为1.11Hz/g(-5g~+5g),x轴灵敏度为0.053Hz/g,y轴灵敏度为0.048Hz/g,频率温度系数为0.815Hz/℃(0℃~+50℃)。
航天长征火箭技术有限公司提出了一种基于三层石英结构的一体式石英振梁加速度[49],如图20所示。经测试,产品全温稳定性优于0.5mg,振动整流误差优于200μg/g2(@15.68g rms),可满足中高精度惯性导航应用需求。
图20 加速度计内部结构Fig.20 Accelerometer internal structure
②硅谐振加速度计
南京理工大学的张家实提出了一种比较器控制电路和两级积分式接口电路,简化了加速度计幅度控制电路结构,降低了电路噪声[50]。测试结果表明,1σ零偏稳定性达到12.8μg,1g稳定性(1σ)达到14.5μg,标度因数稳定性为24.2ppm。
Zhao C等设计制造了一种高性能谐振式MEMS加速度计[51]。测试结果显示,该加速度计噪声基底为98ng/√h,零偏稳定性为56ng,对应频率的噪声基底为0.77ppb/√h,频率零偏稳定为0.43ppb,这是迄今为止谐振式MEMS加速度计所取得的最佳结果。
清华大学的YIN Yonggang等人设计制作了具有热应力隔离的温度不敏感微机械谐振加速度计[52],如图21所示。该加速度计采用了一种新颖的MRa结构设计,此外,玻璃基板被设计为专用形状,以隔离在管芯附接过程中产生的热应力。实验结果表明,温差灵敏度降低到10.5μg/℃,1小时偏差稳定性达到0.7μg,在室温下在10小时内为2.7μg。
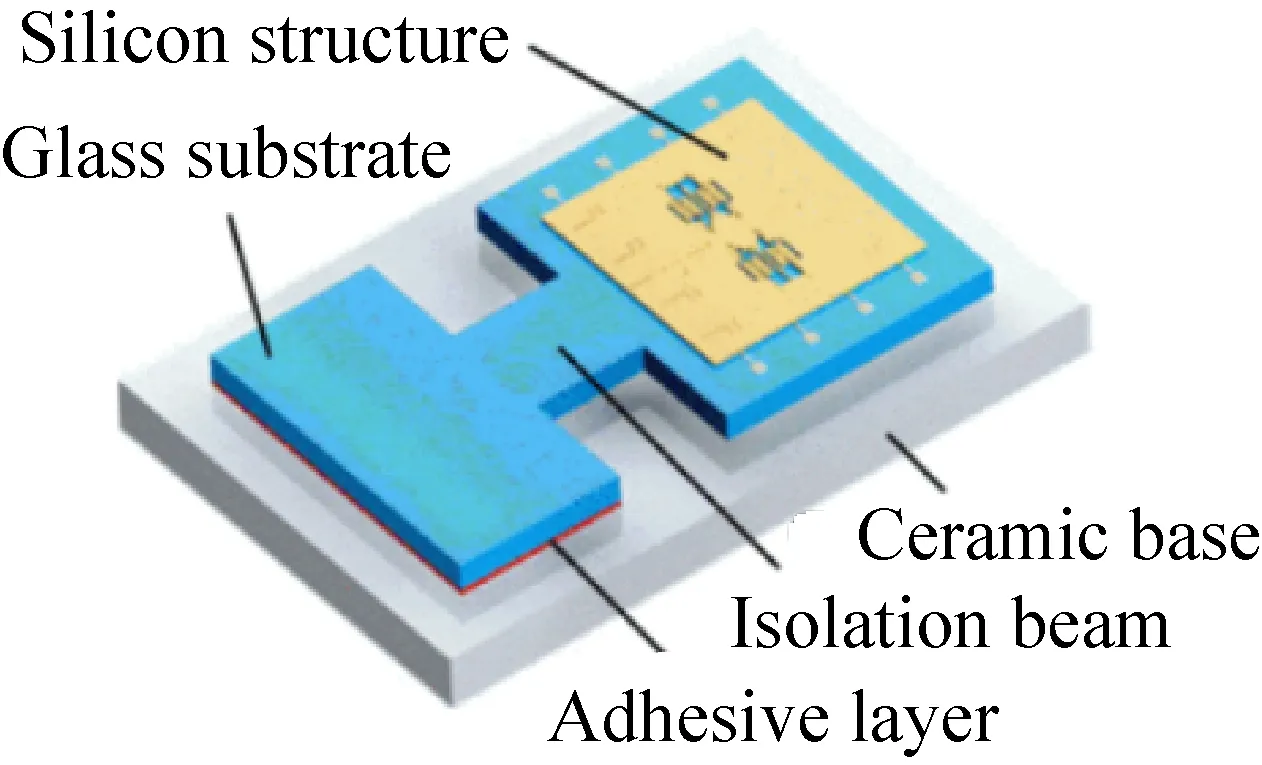
图21 集成器件结构Fig.21 Integrated device structure
2.2.3 其他加速度计
热对流MEMS传感技术能够提供无与伦比的抗振动性能,国内美新半导体公司在2019年发布了最新MEMS热对流加速度计—MXP7205VW[53],其运行原理基于美新专利的MEMS热对流技术,工作温度范围为-40℃~105℃,动态范围±5g,灵敏度800LSB/g,抗冲击力超过50000g,在汽车应用程序中起到至关重要的作用。
总体上,我国的MEMS加速度计经过了近三十年的发展,在某些领域已经取得了优秀的成绩,但与西方发达国家相比仍有些落后,工艺水上与国外先进技术还有一定的差距,产品性能有待进一步提高。
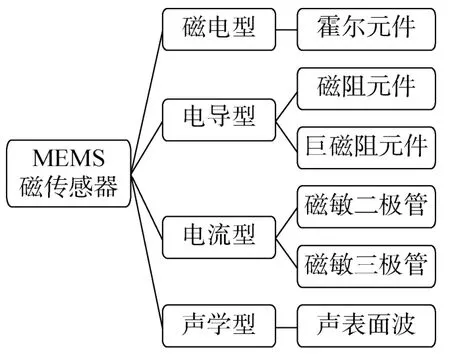
图22 MEMS磁传感器主要分类Fig.22 MEMS magnetic sensor main classification
3 MEMS磁传感器
MEMS磁力计也叫地磁、磁感器,可用于测量磁场强度和方向,是一种微型化的电子罗盘。用来实现磁传感器的原理非常多,如霍尔效应、磁阻效应、巨磁电阻效应、巨磁阻抗效应等[54]。磁力计的基本工作原理是使用各向异性磁致电阻材料来检测空间中磁感应强度的大小,而磁场强度在导航定位中发挥着非常关键的作用。根据输出信号形式不同,可以将MEMS磁传感器分为以下四类[55],如图22所示。
国外从事MEMS磁力计研究的主要有Honeywell公司、NVE公司、BOSCH公司以及一些著名高校等,国内主要有哈尔滨工业大学、清华大学、西北工业大学、多维科技有限公司、无锡美新公司等[56]。目前,微型固态磁阻传感器根据磁阻效应不同主要可分为以下三种:各向异性磁阻传感器AMR、巨磁阻传感器GMR和隧穿磁阻传感器TMR。
① AMR。目前基于各向异性磁阻传感器AMR被广泛应用于微纳卫星领域,其主要原因是AMR磁传感器制备技术目前已经发展得相当成熟,商业化应用较为广泛的产品有美国霍尼韦尔公司的三轴HMC1043[57],磁场分辨力为12nT/√Hz(@0.1~50Hz),灵敏度典型值为1mV/V/Oe。
国内无锡美新公司也发布了面向移动终端的超小型三轴AMR磁传感器:MMC3630KJ[58]。该传感器大小为1.2mm×1.2mm×0.5mm,突破了现有AMR磁传感器技术壁垒,采用独有的设计及技术拓宽量程到±30高斯,并保持优于其他技术5倍以上的噪音等级,能够达到600Hz的传感器相应带宽,从而实现±1°的精度。
② GMR。基于GMR效应的磁传感器主要有NVE公司出厂的商用器件AA002、AAH002和AAL002等,与其它类型的GMR传感器相比具有更高的灵敏度,目前该公司的产品AAL002[59]分辨率达1nT/√Hz。
③ TMR。隧穿磁阻传感器(TMR)是继各向异性磁阻传感器和巨磁阻传感器之后,又新研发的一类新型磁阻传感器。哈尔滨工业大学李翔宇设计了隧穿磁阻传感器接口ASIC芯片,完成了高性能三轴数字输出TMR磁强计系统研制[60]。测试结果表明,在-45℃~85℃的温度范围内,温补后的TMR微磁强计灵敏度温漂系数为-117ppm/℃,磁场测量量程为±100μT,功耗为120mW(三轴),噪声水平为0.26nT/√Hz(@1Hz),非线性为0.11%,零位达到10nT以内。
隧穿磁阻传感器商用级应用较为广泛的有多维有限公司出厂的线性传感器TMR2905[61],其灵敏度为50~60mV/V/Oe,功耗为0.2mW(@1V),本底噪声小于5nT/√Hz(@1Hz),具有较宽的动态范围以及极低的磁滞。
随着磁电子学研究的深入,MEMS磁传感器得到了迅猛地发展,不但在航空航天GPS导航和卫星等军事领域得到广泛应用,同时也在汽车电子、生物医疗、环境监测、物联网、智能手机等民用领域中成为不可缺少的角色,具有很大的市场应用需求。
4 MEMS-IMU研究现状
伴随着MEMS陀螺仪与MEMS加速度计的快速发展,Draper实验室于1994年研制出了首台微机电惯性测量组合[62],由于MEMS-IMU使用了MEMS惯性传感器,因此继承了MEMS惯性传感器的特点,应用领域非常广泛。目前世界上研制MEMS-IMU的多为MEMS芯片生产厂家,较为知名的有意法半导体、AD、古德里奇传感器、SENSOR等。
MEMS-IMU设计作为SINS设计的一项关键技术,根据不同的应用情况在精度、成本、体积等方面也有着不同要求,也会采用不同的MEMS-IMU设计方案,下文将从传统IMU、无陀螺IMU以及多传感器组合IMU三个方面对MEMS-IMU研究现状做简单介绍。
4.1 传统MEMS-IMU
传统意义上的MEMS-IMU由三个正交安装的加速度计和三个正交安装的陀螺仪组成,是目前研究最为成熟的MEMS-IMU结构形式。
霍尼韦尔的HG1930 MEMS IMU是目前世界范围内最为先进、装备应用最为广泛的MEMS惯性系统产品,尺寸仅为0.14m3。陀螺X轴量程最高为7200(°)/√s,Y轴、Z轴量程最高为1440(°)/√s,零偏重复性为20~60(°)/h(1σ),零偏稳定性为1~1.5(°)/h(1σ),加速度计X轴量程最高为85g,Y轴、Z轴最高为35g,零偏稳定性分别为0.3mg(CA50)、0.5mg(BA50,AA50),零偏重复性分别为5mg(CA50)(1σ)、10mg(BA50,AA50)(1σ),抗冲击大于20000g,已经大量应用于美军制导炮弹及无人机系统[63]。
ADI推出的ADIS16490战术级六自由度模块[64],体积为47mm×40mm×14mm,工作温度为-40℃~105℃,抗冲击性为2000g。其中,三轴数字陀螺运动中偏置稳定度为1.8(°)/h,角向随机游走为0.009(°)/h,三轴数字加速度计量程为±8g,运动中偏置稳定度为3.6μg。
Bosch Sensortec宣布推出BMI270,包含三轴陀螺仪和三轴加速度计[65],如图23所示。尺寸为2.5mm×3.0mm×0.8mm,工作温度为-40℃~+85℃。三轴陀螺仪最大测量范围为±2000dps,灵敏度为16.4LSB/dps,噪声密度为0.008dps/√Hz,三轴加速度计最大测量范围为±16g,灵敏度为2048LSB/dps,噪声密度为160μg/√Hz。
4.2 无陀螺MEMS-IMU
无陀螺IMU是指在普通MEMS-IMU中不使用陀螺仪测量角速度,即将加速度计代替陀螺仪,根据角速度信号,将测得的数据进行合理优化,最后解算出角速度的MEMS-IMU[66]。无陀螺MEMS-IMU与普通IMU相比具有能耗低、成本低、可靠性高等优点。
DEVYATISIL A S等人对无陀螺IMU进行设计,并对三轴加速度计测量结果进行运算和分析[67]。南京理工大学的王东江等提出了一种易于工程配置的九加速度的姿态测量方法[68],其配置方式如图24所示。
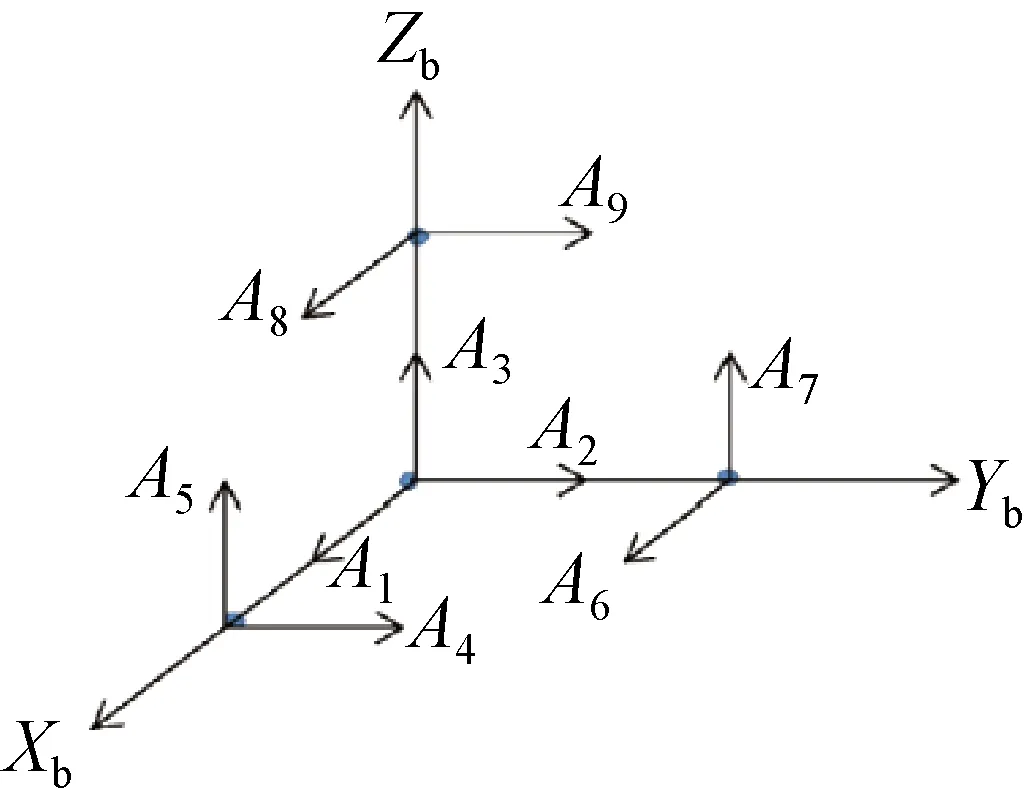
图24 九加速度计配置方式Fig.24 Nine accelerometer configuration
4.3 多传感器组合MEMS-IMU
LSM9DS1是ST公司推出的九轴惯性传感器[69],工作温度为-40℃~+85℃。三轴陀螺仪最大量程为±2000dps,三轴加速度计最大量程为±16g,三轴磁力计最大量程为±16高斯。
STIM300是Sensonor公司推出的一款仅重55g的小型MEMS-IMU[70],如图25所示。该IMU内置了3个倾角仪以确保精准的系统调平,工作温度为-40℃~+85℃,采样率为2000Hz。三轴陀螺仪零偏不稳定性为0.5(°)/h,角随机游走为0.15(°)/√h,非线性度为50ppm,带宽为262Hz,三轴加速度计零偏不稳定性为0.05mg,速度随机游走为0.06m/s/√h,最大量程为80g。倾角仪输入范围为1.7g,分辨率为0.2μg,标度因数为500ppm。
目前,国内研制MEMS-IMU的科研院所主要有清华大学、北京大学、中电13所、中电26所、航天704所、航天33所、航空618所等[71]。限于各种原因,国内公开发布的MEMS-IMU研究内容较少。

图25 STIM300 MEMS惯性测量单元Fig.25 STIM300 MEMS inertial measurement unit
5 MEMS惯性传感器发展趋势
近些年来,伴随着MEMS技术理论研究的进步及工艺水平的提高,不仅使MEMS陀螺仪、MEMS加速度计以及MEMS-IMU成本得到了大幅降低,而且在测试精度与环境适应性等方面也有了显著提升,得到广泛应用。结合前文对MEMS惯性传感器发展现状调研,给出如下三点发展趋势:
① 采用新工艺、新机理满足未来对MEMS惯性传感器的更高要求。例如光学陀螺与原子陀螺结合MEMS工艺制造的MEMS陀螺[17,72,73],以及利用SiC、SiN、聚合物等材料制作的微机械谐振式加速度计[74]。
② 集成化、低功耗、低成本的MEMS惯性传感器满足需求日益增加的民用消费领域。如Bocsh于2019年最新发布的BMI270 MEMS-IMU[65],尺寸仅为2.5mm×3.0mm×0.8mm,主要应用于智能手表、增强和虚拟现实眼镜等方面。
③ 高性能、特殊应用环境下的MEMS传感器主要应用于军事领域。2012年,DARPA启动芯片级组合原子导航计划,简称C-SCAN,即寻求将不同物理特性的惯性传感器集成到单一的微尺度惯性测量单元(IMU),这也是DARPA开展的微PNT计划的重要组成部分,其目的是构建自主的、不依赖GPS的芯片级微PNT系统,能适用于不同军用平台、不同作战环境的载体精密引导,并能适用于中远程导弹的引导[75]。C-SCAN计划核心是将具有不同物理特性的PNT组件集成到单一的微系统(microsystem),首要的任务是集成一个多陀螺和多加速度计的单一的惯性测量单元(IMU)。C-SCAN组件具有3个旋转轴和3个加速度传感器,在恶劣环境下可为军用载体提供定位导航服务。
