基于转台角度的远场图像快速校正方法研究
2019-04-25
(长春理工大学 光电工程学院,长春 130022)
激光半主动制导武器在高技术战争中愈发受到人们的重视,是我国科技国防战略的重点[1]。激光半主动制导武器由激光制导导弹、激光照射器组成。激光照射器照射目标,激光制导导弹根据激光光斑对目标进行打击,其中激光照射器命中率精度是评估激光照射器性能的重要指标[2],命中率精度严重影响制导导弹的制导精度。畸变的远场图像对激光照射器命中率精度的快速性和准确性有很大影响[3]。为了提高激光照射器命中率精度,需对远场图像进行快速畸变校正。
目前对图像进行畸变校正的方法有:长春光学精密机械与物理研究所代勤[4]根据成像系统的成像机理对图像进行校正的方法;北京遥感设备研究所曹天阳等人[5]利用LM算法迭代建立八参数透视畸变模型对图像进行校正的方法;长春理工大学王延海等人[6]构建变换矩阵求得图像校正模型,进而对图像进行透视畸变校正的方法。
以上方法对特定条件下透视畸变图像均有较好的校正效果,但对激光照射器性能监测系统,以上方法在操作简单、计算快速、处理准确等方面并不完全满足要求。
针对以上问题,为了精确校正测试系统中动态目标靶板,提出基于转台相对角度远场图像快速校正方法,该方法仅需要对一张参考图像进行特征点选取,再利用参考图像的转台角度得到畸变校正模型,最终实现对连续的远场图像进行快速校正。该方法满足激光照射器性能监测系统的要求,具有实验条件要求低、处理速度快、识别精度高、原理简单、耗时短,大大简化了计算复杂度等优势。
1 激光照射器性能监测系统工作原理
1.1 激光照射器性能监测系统
激光照射器性能监测系统包括激光照射器、目标靶板、成像系统、测试轨道、转台以及控制终端,如图1所示;激光照射器设置在空中,对搭载在测试轨道上并水平移动的目标靶板进行照射;成像系统搭载在转台上,转台对目标靶板进行实时跟踪,进而使成像系统对目标靶板进行跟踪拍摄,对合作目标[7]连续采集得到图像并保存。
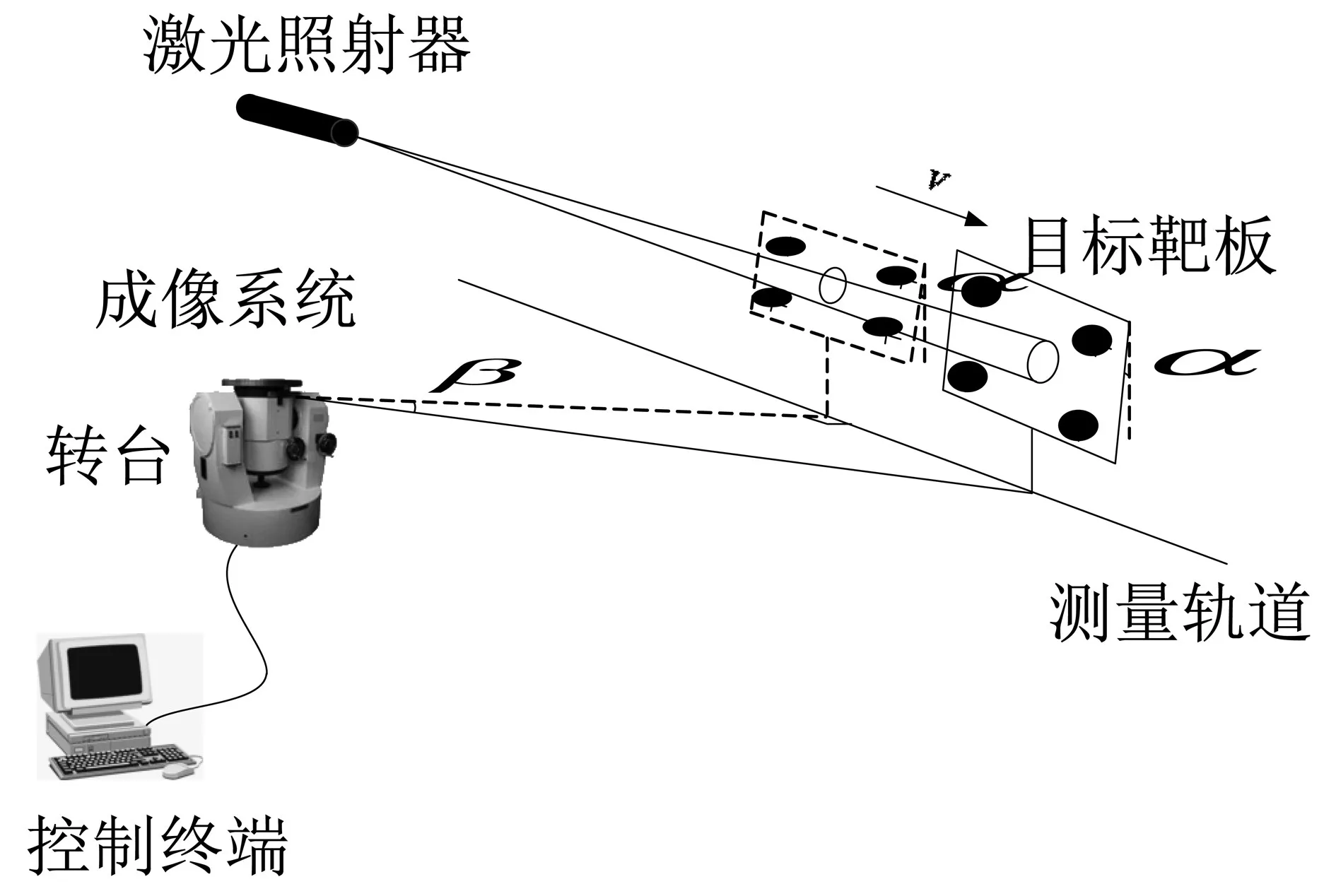
图1 激光照射器性能监测系统示意图
1.2 激光照射器性能监测系统数据框图
如图2所示,通过BD/GPS/时统单元对成像系统提供实时时间,成像系统为图像及数据处理单元提供图像及数据,力矩电机及编码器提供俯仰、方位编码数据,图像及数据处理单元对带有俯仰、方位编码数据的图像进行处理。
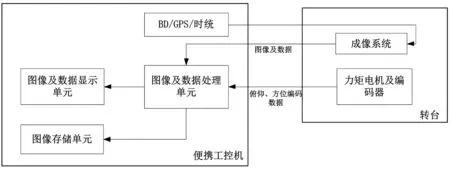
图2 激光照射器性能监测系统数据流框图
激光照射器性能检测系统中,由于搭载成像系统的转台其瞄准轴与目标靶板存在实时变化的夹角等环节的影响,采集到的图像存在不同程度的畸变[8],成像系统光轴与目标靶板法线的夹角越大、目标靶板与成像系统距离越远,畸变越严重,严重影响光斑大小、照射精度、图像融合等技术参数的计算[3],更有甚者会造成计算错误,因此,连续远场图像的畸变校正显得尤为重要。
2 连续的远场图像畸变校正原理
2.1 远场图像畸变校正原理
目标靶板距成像系统Lkm,目标靶板沿测试轨道运动,其运动距离与Lkm相比很小,可等效为实际靶板图像在成像系统光轴方向有k倍的缩放。
如图3所示,实际靶板图像经过缩放后得到真实畸变靶板图像,真实畸变靶板图像在空间水平及俯仰方向均有畸变,校正后即可得到真实非畸变靶板图像。
对于空间水平及俯仰方向有畸变的图像,一般采用特征点匹配法[9]、BP神经网络的物镜畸变改正模型[10],根据成像系统的成像机理进行图像畸变校正等方法。
畸变图像与校正后图像关系如公式1[11]:

式中,f畸变(x,y)为畸变图像矩阵,T校正(x,y)为校正矩阵,f校正(x,y)为未畸变图像矩阵。
为满足激光照射器性能检测系统要求,本文将公式中T校正(x,y)转换为以转台相对角度β为参量的校正矩阵T校正(β,α,k),其中k为实际靶板图像尺度变换缩放系数。即如公式2:

2.2 远场图像的校正矩阵模型
基于转台相对角度得到参考靶板图像的标准校正矩阵,根据标准校正矩阵得到校正矩阵模型,最后将连续远场图像的转台相对角度βn、目标靶板与地面法线的夹角α输入到校正矩阵模型内,就能实现连续远场图像的快速校正。远场图像校正矩阵模型算法框图如图4所示。
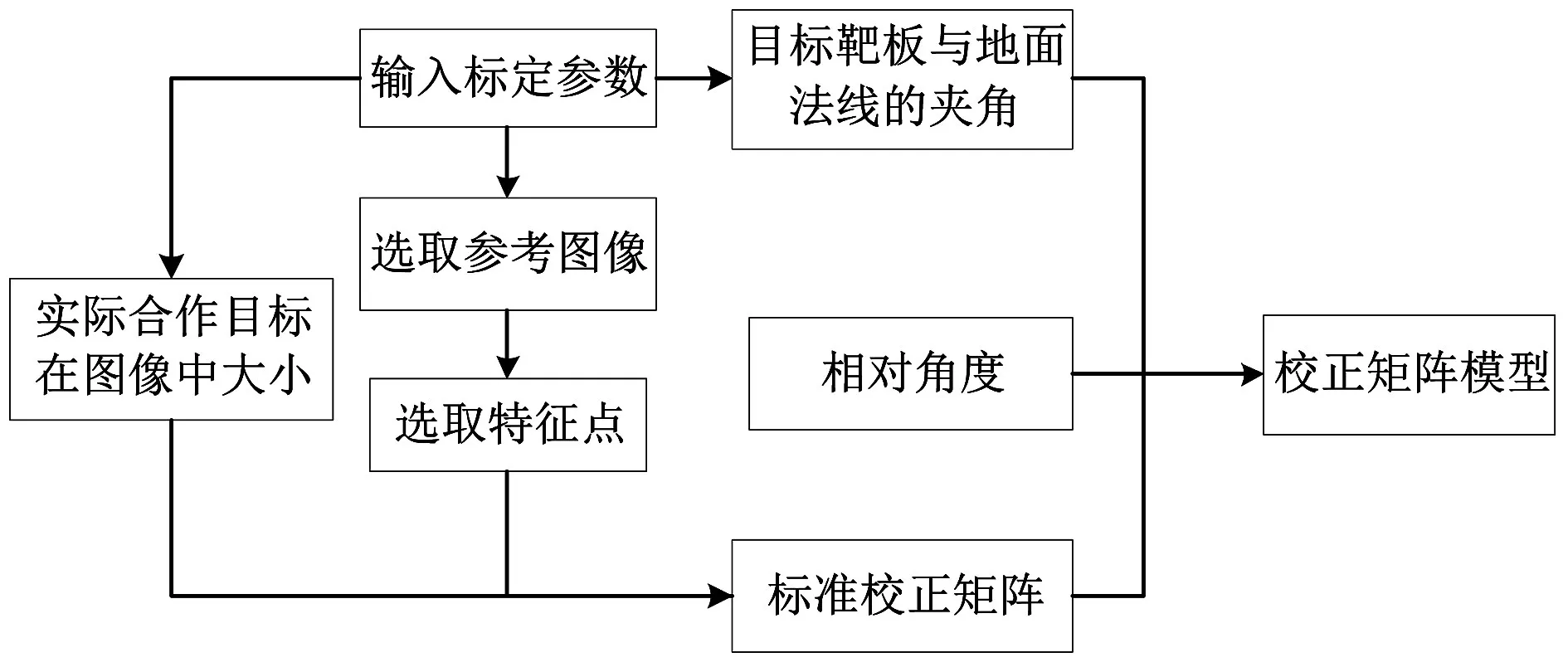
图4 远场图像校正矩阵模型算法框图
基于转台相对角度确定参考靶板图像的标准校正矩阵,根据标准校正矩阵得到校正矩阵模型。
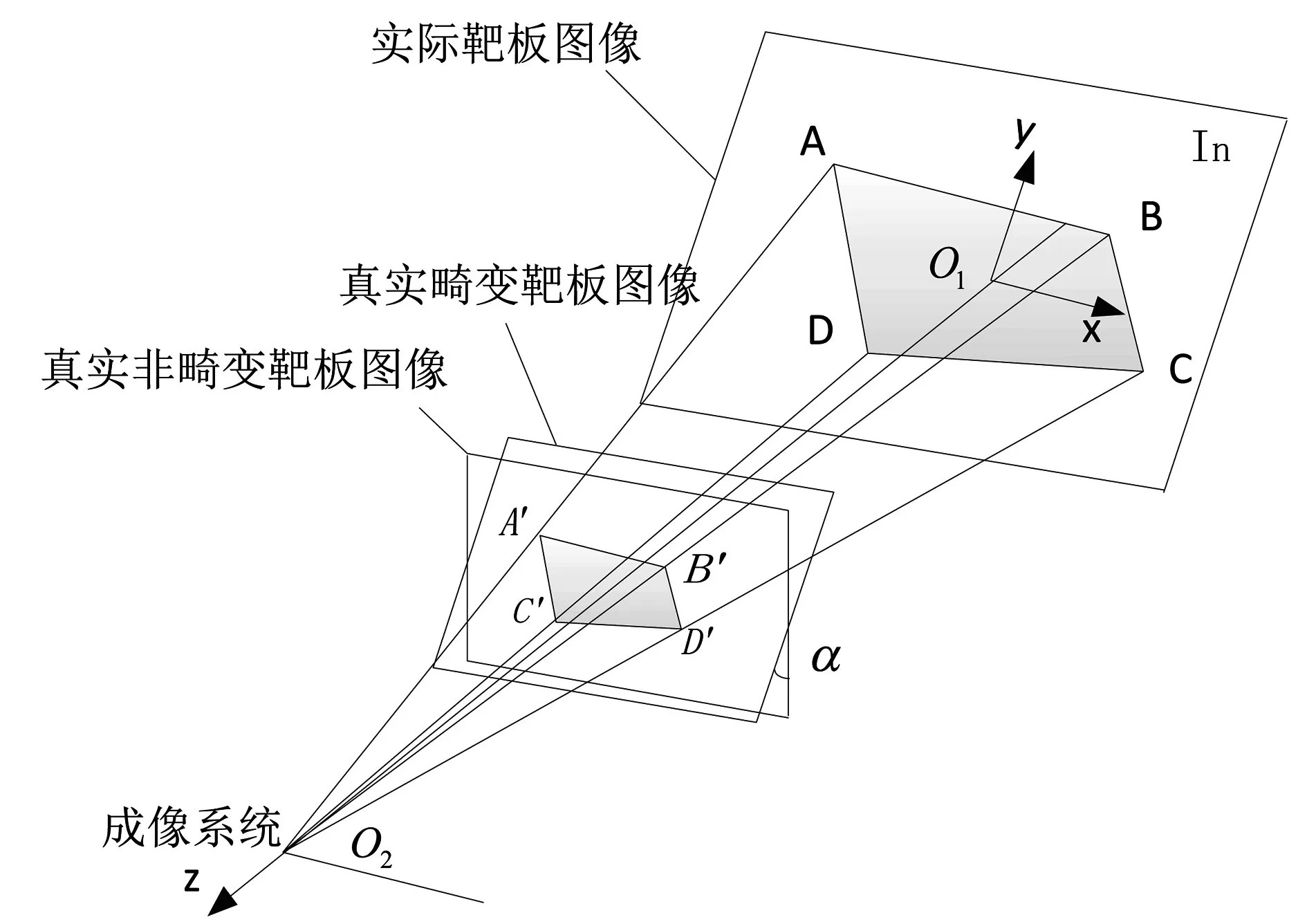
图5 目标靶板坐标系示意图
如图5所示,建立坐标系XYZ,坐标系原点O1为参考图象In四个合作目标所组成矩形的中心,坐标系的Z轴由O1指向成像系统的光学中心O2,坐标系的XY轴为过O1且垂直于Z轴的横纵方向。目标靶板距成像系统L公里处,设参考靶板图像左上的合作目标A坐标为(xA,yA,L),对点A作空间缩放得到A在真实畸变靶板图像上坐标,如公式3所示:


公式(3)、(4)联立,可求得缩放系数kn:

式中,α为目标靶板与地面法线的夹角、βn为转台相对角度、L为目标靶板与成像系统垂直距离。
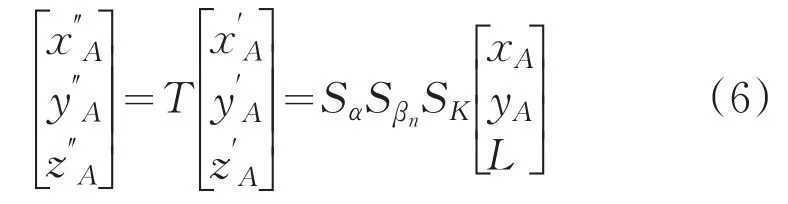
式中,T为畸变校正模型矩阵;Sα为关于α的变换矩阵,Sβn为关于βn的变换矩阵,Sk为尺度变换矩阵。式中的矩阵如公式7、8、9下所示:
式中:α为所述目标靶板与地面法线的夹角,βn为所述转台相对角度,k为图像尺度变换缩放系数。
2.3 转台相对角度
转台方位角由光电轴角编码器提供完成俯仰、方位的实时测量,而后将俯仰、方位编码数据加载至对应的目标靶板图像。成像系统得到目标靶板图像,该图像左上方条码包含时间信息及转台角度信息,对该条码进行读取,即可得到靶板图像对应的转台方位角。
对采集到的连续远场图像中的条码进行识别,得到连续远场图像的转台方位角θn并存储,根据公式(10)及转台初始方位角θ0,计算每幅远场图像的转台相对角度βn:

3 试验及结果分析
3.1 激光照射性能检测系统模拟试验
根据本文提出的畸变校正方法模拟了外场试验,选用美国IMPERX公司的ICL-B1410型相机为成像设备,该相机的像元尺寸为6.45μm×6.45μm,光谱响应范围为0.3~1.1μm,图像分辨率为1392×1040,帧频为50fps。采用21位绝对式光电轴角编码器,位数为21位,输出形式为并行21位自然二进制代码,TTL电平,8位总线输出,RS485接口。模拟激光照射器性能监测系统实际测量环境试验:目标靶板上四个黑色圆形合作目标组成的标准矩形宽高为1455mm×845mm,保持目标靶板与地面法线夹角为15°,并沿事先设定测试轨道的路线运动,成像系统距测试轨道的垂直距离为0.82452km,成像系统固定至转台上,随目标靶板移动转台转动,成像系统跟踪目标靶板,连续采集图像,并进行数据保存。
根据本文的校正方法,将图像序列进行相关处理,从而实现对连续远场图像的畸变校正。
3.2 实验数据及分析
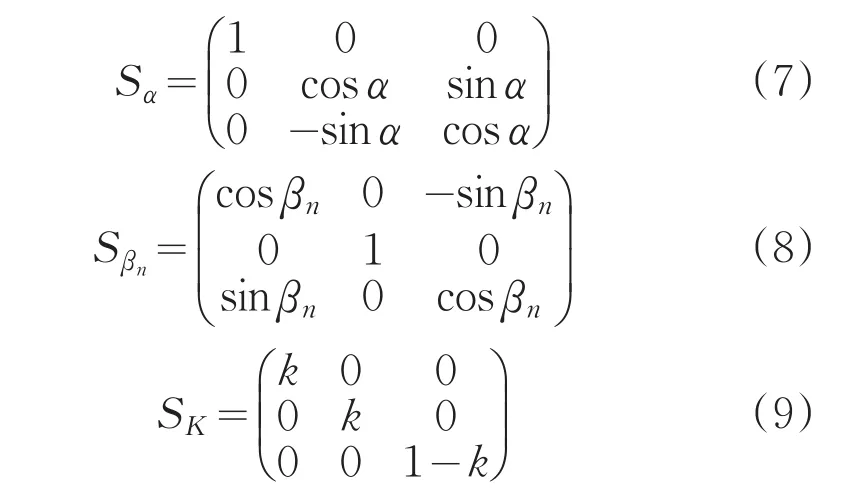
根据以上算法,对存储后的数据进行处理,存储数据共采集504帧图像,处理后选取第1、41、101、141、181、291、331、391、431、451帧特征图像,如图6为第391帧图像及其校正效果图,其对比图如下:
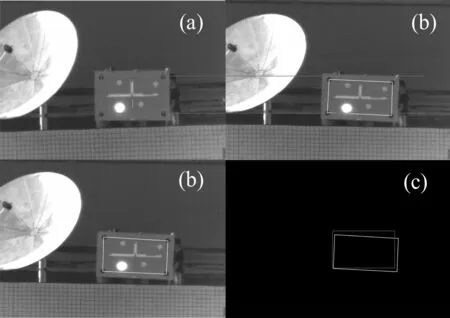
图6 第391帧图像及校正效果对比图
图6可以明显看到畸变校正效果,目标靶板图像在水平方向及垂直于水平方向均存在一定程度畸变,其中靶板与地面夹角为15°,垂直于水平方向畸变角度由条码得到,经过畸变程序对其进行校正后,靶板图像的畸变程度得到了明显改善。
为准确评估本文提出的基于转台角度的远场畸变校正方法,对比畸变图像、基于转台角度的畸变校正图像对应的靶板尺寸变化,表1给出了在保持靶板与地面夹角为15°的情况下进行外场实验的激光照射性能监测系统实验数据(单位:像素)。
其中根据成像系统像元尺寸、成像系统焦距及成像系统距测量轨道的垂直距离可以求得靶板在远场图像中的理想靶板尺寸为149.1×86.59像素。以此作为畸变校正的评价因子。表2给出了激光照射性能监测系统分析数据(单位:像素)。
表2 校正前后合作目标尺寸比较表
从表2可以看出远场图像校正前,第1、41、101、141、181、291、331、391、431、451帧特征图像中合作目标宽为139~147像素,合作目标高为87~94像素;远场图像校正后,合作目标宽为147~149像素,合作目标高为85~88像素。
从图7可以看出第1、41、101、141、181、291、331、391、431、451帧特征图像中,校正前合作目标宽高与理想合作目标宽高相比较起伏较大,而校正后合作目标宽高与理想合作目标宽高相比较很稳定。
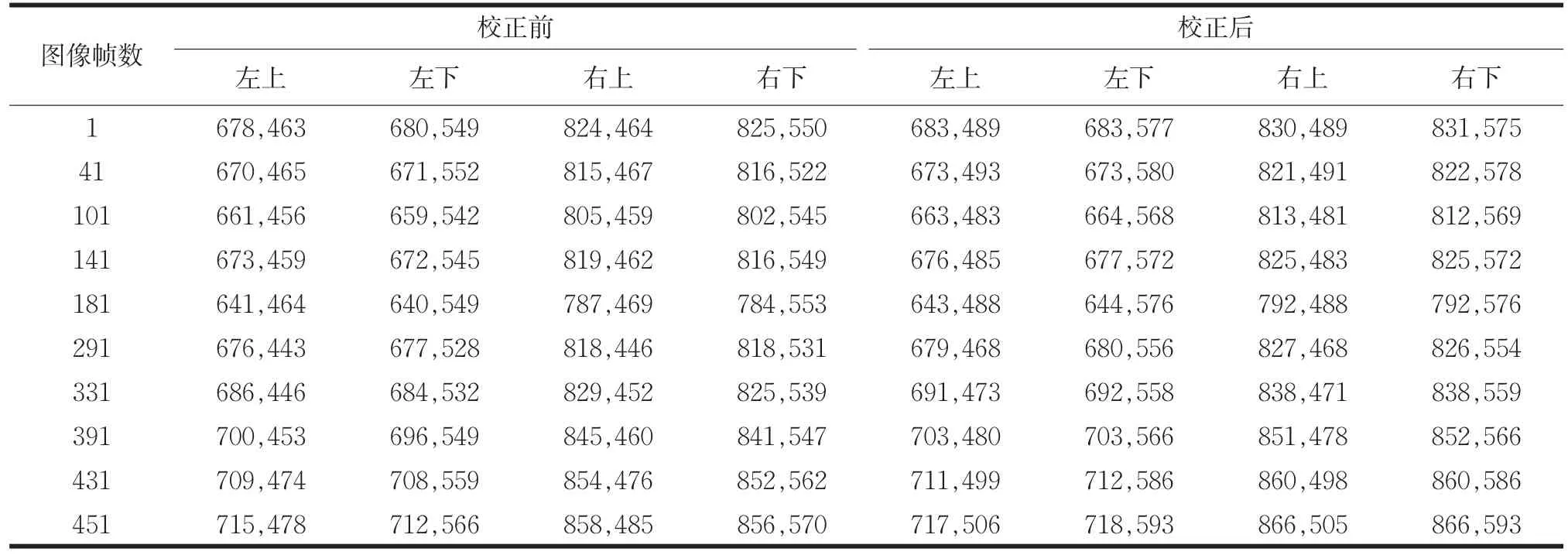
表1 校正前后靶板图像数据
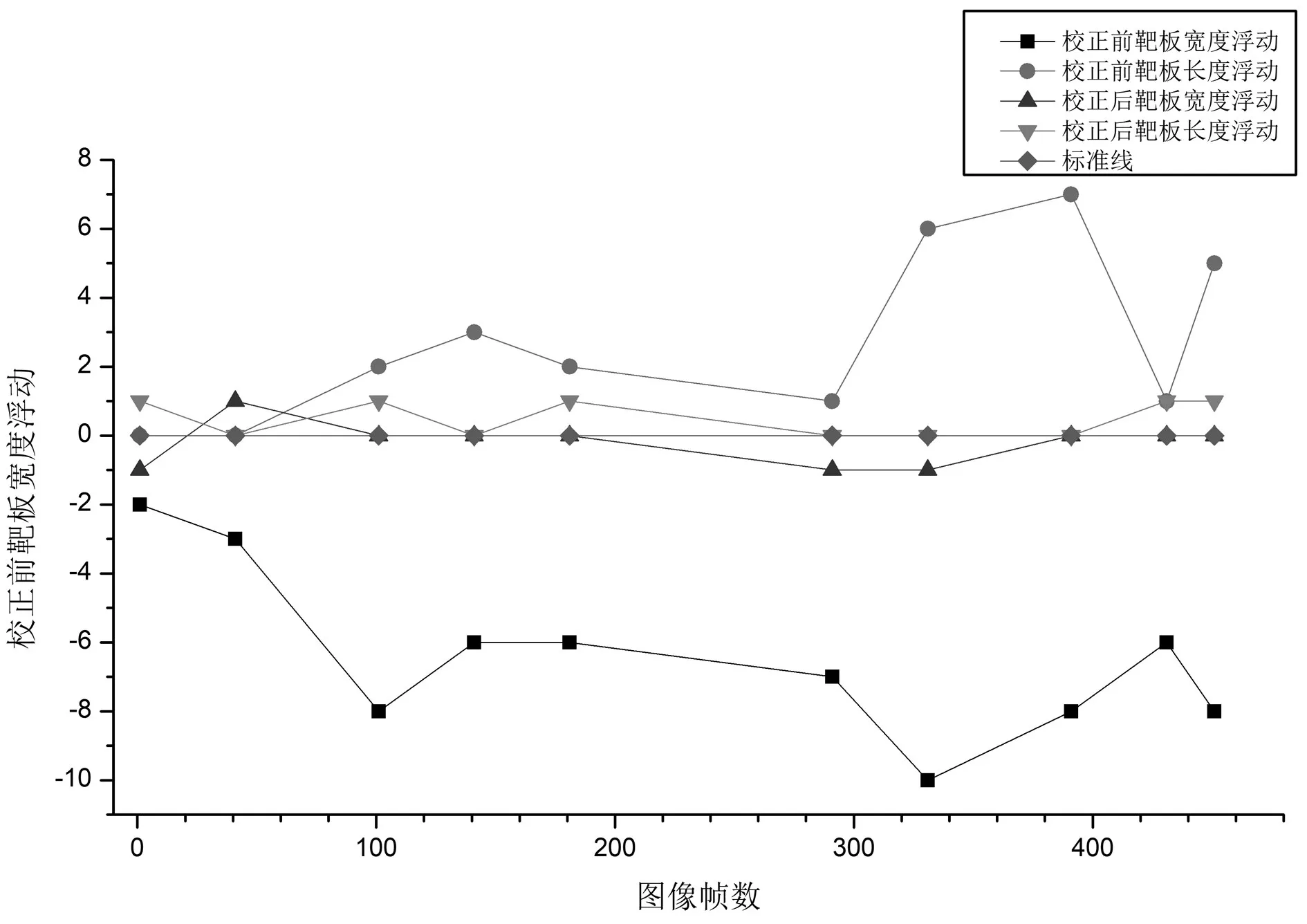
图7 合作目标校正前后宽高对比图
通过多次试验,对实验数据进行处理,根据误差理论,合作目标的识别精度计算公式如(11)、(12):
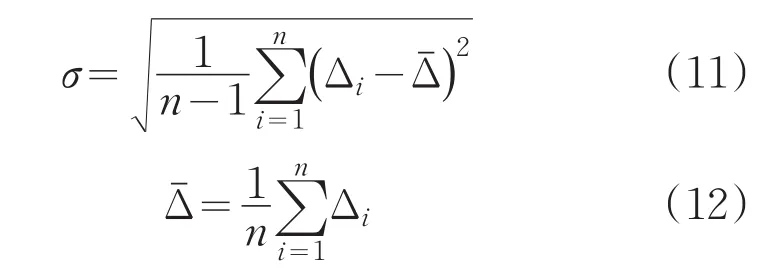
式中,σ为测量精度,Δi为第i帧合作目标长或宽,为n次测量均值,n是测量图像总帧数,校正前合作目标宽的RMS值为142.6,合作目标长RMS值为89.73;校正后合作目标宽RMS值为148.8,校正前合作目标长的RMS值为86.50,校正后合作目标宽的校正精度为0.3pixel,合作目标宽长的校正精度0.09pixel。即基于转台角度的远场图像畸变校正精度为0.3pixel。
4 结论
本文提出了基于转台相对角度作为畸变参量,对远场图像进行畸变校正的方法。利用转台相对角度有效解决了多次选取特征点对连续远场光斑图像进行畸变校正的耗时、算法复杂等问题,克服了目标识别不完整,命中率精度低,定位不准确等缺陷。以转台相对角度作为畸变参量确定一幅目标靶板图像的校正矩阵,将每幅待校正的远场目标靶板图像的转台相对角度、目标靶板与地面法线的夹角输入校正矩阵内,实现多幅远场目标靶板图像的校正,不需要对每张远场图像进行手动选取特征点,也不需要对每张目标靶板图像重新求取校正矩阵,耗时短、计算简单,满足激光照射性能监测装置的要求,校正的精度为0.3个像素。结果表明:该方法在目标靶板连续运动时仍具有较好的校正效果,在外场激光照射精度测量过程中发挥了重要的作用。
