修剪中值检测的自适应加权中值滤波算法*
2019-04-18陈家益战荫伟曹会英吴兴达李小飞
陈家益,战荫伟,曹会英,吴兴达,李小飞
1.广东医科大学 信息工程学院,广东 湛江 524023
2.广东工业大学 计算机学院,广州 510006
3.长江大学 信息与数学学院,湖北 荆州 434023
1 引言
图像在产生与传输的过程中,难免受到噪声的污染。噪声对图像的各种应用处理以及图像分析都会产生负面的影响,图像的去噪至关重要。脉冲噪声是一种最常见的噪声,椒盐噪声是一种典型的脉冲噪声。均值滤波是低通滤波,会破坏图像的细节和边缘[1]。相对均值滤波,中值滤波能在一定程度上保持图像的高频信息[2]。标准中值滤波算法对所有的像素统一用邻域的灰度中值取代[3]。自适应中值滤波算法对标准中值滤波算法进行改进,去噪的邻域大小随噪声密度自适应地变化[4]。加权中值滤波算法利用邻域像素之间的相关性,根据位置关系赋予邻域像素不同的加权系数,提高了对像素的原始灰度进行估测的准确性[5]。这些算法最大的缺陷是,统一处理所有像素,破坏了图像的原始信息。
为了对噪声与信号像素进行区别处理,学者们提出了带噪声检测的滤波算法。学习型的开关中值滤波算法[6]提出了基于学习的噪声检测,以迭代方法在自适应大小的邻域中取信号像素的中值进行去噪。重叠的中值滤波算法[7]根据灰度最值0和255检测噪声,对噪声图像分别以不同大小的邻域进行中值滤波,再对各去噪图像进行加权均值滤波。近年来,决策中值滤波算法以其灵活的噪声检测和去噪策略,提高了去噪性能,比如基于决策的修剪中值滤波算法[8],将去噪邻域的大小设为3×3,在噪声密度较高时,用邻域中已处理像素的灰度中值进行去噪。算法所用的去噪邻域太小,缺乏灵活性,不适于高密度噪声图像。基于决策的中值滤波算法(implementation of decision based algorithm,IDBA)[9]将去噪邻域设为3×3,根据灰度最值以及邻域的灰度进行噪声检测,如此提高了噪声检测的准确性,但是单一的去噪邻域太小,对高密度噪声的去噪性能较差。基于概率决策的块中值滤波算法(probabilistic decision based filter to remove impulse noise using patch else trimmed median,PDBF)[10],如果块中值不是0或255,用块中值去噪,否则输出修剪中值。相对于中值,块中值更加接近像素的原始灰度,能更好地保持图像的边缘和细节。改进的自适应中值滤波算法,以其灵活的自适应性,旨在提高对高密度噪声的去噪性能。比如快速有效的自适应中值滤波算法[11],对低密度和高密度噪声,分别用十字形邻域和矩形邻域进行去噪。算法的计算逻辑简单,在噪声密度较低时,十字形的邻域更能体现像素之间的相关性。多层次自适应开关滤波算法[12]基于邻域像素的距离与灰度差分进行自适应加权均值滤波。但是,加权均值滤波是低通滤波,会破坏图像的高频信息。文献[13]提出的改进的自适应中值滤波算法,将剔除噪声像素后的灰度中值进行去噪,去噪邻域大小随噪声密度自适应地变化。改进的递归自适应中值滤波算法[14]结合噪声的灰度最值特征与灰度直方图的双峰进行噪声检测,将剔除噪声像素后的灰度中值进行去噪。当噪声密度较低时,灰度直方图的双峰不明显,并不能提高噪声检测的准确性。中值滤波是从概率统计的意义上,对噪声像素的原始灰度进行估测,中值滤波与均值滤波的结合,往往能取得更好的去噪性能。比如中值滤波与均值滤波结合的开关滤波算法(switching median-mean filter for removal of highdensity impulse noise,SMMF)[15]提出了两种滤波方案,对噪声图像进行多次的中值滤波处理,然后进行均值滤波,或者对噪声图像进行多次的均值滤波处理,然后进行中值滤波。根据像素的距离远近或灰度差分大小,分别赋予邻域像素不同的复制权系数的加权中值滤波算法,能更准确地对噪声的灰度进行估测。比如自适应开关加权中值滤波算法(adaptive switching weighted median filter framework,ASWMF)[16]根据像素的位置关系,分别赋予邻域中信号像素不同的加权系数,取加权中值进行去噪。算法存在的缺陷是,只采用3×3和5×5两种尺寸的去噪邻域,限制了对高密度噪声的去噪性能。
深入地研究与分析现有滤波算法的优缺点,提出了修剪中值检测的自适应加权中值滤波算法(adaptive weighted median filtering algorithm based on detection with trimmed median,WMFDTM)。本文的组织结构如下:第2章,提出基于修剪灰度中值的噪声检测法;第3章,提出自适应加权中值去噪法;第4章,阐述算法的总体流程;第5章,实验与数据分析;第6章,研究工作的总结与展望。
2 基于修剪灰度中值的噪声检测
基于修剪灰度中值的噪声检测方法,分别利用噪声的灰度最值特征,以及邻域像素的相关性与灰度近似性。
(1)根据噪声的灰度最值特征进行噪声检测
文献[17]中的实验结论以及新的实验数据显示,椒盐噪声的灰度一定为灰度最值0和255,将灰度为0和255的像素识别为噪声,全部的真实噪声都被检测出来,漏检率达到0。但是,图像中也存在灰度为0和255的信号像素,将这部分信号归为噪声,继而进行滤除,就会破坏图像的这部分原始信息。需要对灰度为0和255的像素做进一步的鉴别,以识别灰度为0和255的信号像素,将其从噪声集合中剔除。
(2)根据邻域像素的相关性与灰度近似性进行噪声检测
根据图像像素以及噪声的分布特征,椒盐噪声的分布是整体均匀的、随机的,噪声点之间是孤立的,不存在相关性。一个灰度为0的像素,如果其邻域像素的灰度全部为0或者近乎为0,那么说明它与邻域像素具有强相关性,不是噪声;如果它与邻域像素的灰度相差悬殊,说明它是一个孤立的点,是噪声。对于灰度为255的像素,其原理一样。
具体方法为,对于灰度为0的像素,如果其邻域像素的灰度全为0,则识别为信号,或者如果将灰度为0和255的像素剔除后的邻域像素中值与0接近,则该像素识别为信号,否则识别为噪声。同样地,对于灰度为255的像素,如果其邻域像素的灰度全为255,则识别为信号,或者如果将灰度为0和255的像素剔除后的邻域像素中值与255接近,则该像素识别为信号,否则识别为噪声。
3 自适应加权中值去噪
3.1 大小自适应的去噪邻域
在较小的邻域中取样以对噪声像素的灰度进行估测,其准确性相对较大的邻域较高,因为距离越近的像素,其相关性越强,灰度的相似性越高,对噪声的估测值偏差越小。因此,对噪声的滤除,从最小的邻域开始。如果小的邻域中不存在信号像素,扩大邻域以取得可以对噪声进行估测的信号像素。如此,小邻域对应应用于低密度噪声,大邻域对应应用于高密度噪声。当邻域扩大到一定的尺寸,邻域中依然不存在信号像素,则取邻域中已经去噪处理的像素作为样本,对噪声进行估测。
相对现有的以固定邻域进行去噪的算法,比如文献[3,8-9,16]等,WMFDTM算法具有明显的灵活性,宏观上灵活地适应于不同的噪声密度,微观上灵活地适应于噪声分布的局部不均匀性。双重的灵活适应性,必然进一步提高其去噪性能。
3.2 基于相关性与灰度近似性的加权中值
既然距离越近的像素,其相关性越强,灰度近似性越高,对噪声的估测值偏差越小,同时在一定的邻域中,各邻域像素与中心像素的距离不完全相同,因此,根据距离的远近分别赋予各邻域像素不同的加权系数。加权系数表示对此处的信号像素的灰度进行重复的频次,如果此处的像素为噪声,则加权系数为0。距中心像素越近的信号像素,其加权系数越大,重复的频次越高,如此,其成为中值的概率越大。从概率意义上提高对噪声像素进行估测的准确性。
假设中心像素f(i,j)为亟待进行去噪处理的噪声,采用的加权算子如图1所示,对应9×9邻域。赋予f(i,j)的加权系数为0,根据邻域像素f(s,t)与 f(i,j)的距离,赋予f(s,t)加权系数,如式(1)。
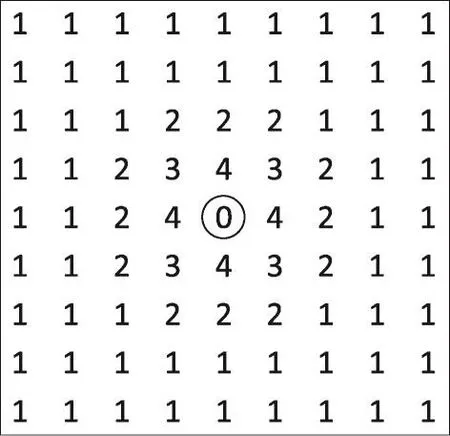
Fig.1 Weighted operator图1 加权算子

其中,round为四舍五入函数,分子4为水平或垂直方向上的邻域像素与f(i,j)的最大距离。当邻域很小时,与中心像素距离不同的邻域像素,与中心像素的相关性以及灰度近似性往往差异悬殊;当邻域很大时,与中心像素距离不同的处于远处的邻域像素,与中心像素的相关性以及灰度近似性往往差异很小。因此,3×3邻域边缘的像素的加权系数为4和3,邻域小以致其像素也少;5×5邻域边缘的像素的加权系数为2和1;超出5×5邻域的像素的加权系数全为1。
3.3 加权中值对现有算法的改进
现有的常规中值滤波算法,比如文献[4,6,8-11,13-14]等,简单地取邻域中信号像素的中值作为噪声像素的估测值,如此,对邻域中的所有像素同等对待,忽略了它们分别与中心像素的相关性和灰度近似性的差别这一特性,而这一特性被WMFDTM算法充分利用。WMFDTM算法根据与中心像素距离的远近,分别赋予邻域像素不同的加权系数,以区别它们分别与中心像素的相关性以及灰度近似性,如此,对中心像素的灰度估测值与其原始灰度更加接近。
具体地,根据图2所示比较所提出的加权中值与常规中值。图2(a)为截取自标准图像Lenna的一个5×5区域(380~384,200~204),中心像素的灰度为51。图2(b)为给图像加密度为0.6的椒盐噪声后对应的图2(a)区域。根据图2(b),灰度为51的中心像素已被噪声破坏,在3×3邻域中,常规的信号中值为48,而结合图1加权算子得到的加权中值为49,加权中值更加接近中心像素的原始灰度。又假设3×3邻域不存在信号像素,去噪邻域扩大至5×5,如此,常规的信号中值为47,而结合图1加权算子得到的加权中值为52,说明加权中值更加接近中心像素的原始灰度。
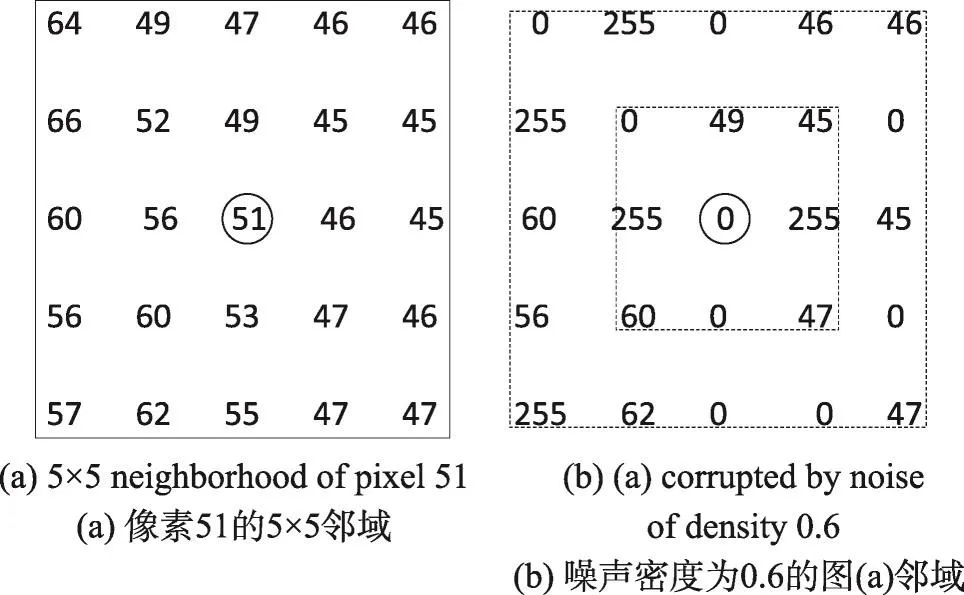
Fig.2 Pixel area of(380~384,200~204)in image Lenna图2 图像Lenna的(380~384,200~204)像素区域
另外,图1所示的加权算子其各位置的加权系数,反比于与中心位置的距离,它是对现有的加权中值滤波算法,比如文献[5,16],作了进一步的改进。在文献[16]中,3×3邻域中处于水平与垂直方向位置的系数,是处于对角线位置的系数的两倍;另外,在5×5邻域的边缘上处于水平与垂直方向位置的系数,比3×3邻域中处于对角线位置的系数还要大。因此,文献[16]在反映各邻域像素分别与中心像素的相关性和灰度近似性上有失偏颇。
4 WMFDTM算法的整体步骤
设f(i,j)为(i,j)处的像素灰度,T为一个预先设置的阀值,Wij(k)为中心在(i,j)处、大小为k×k的邻域,kmax为k允许的最大值,R为噪声标识矩阵,WP为图1的加权算子。算法的伪代码如下。
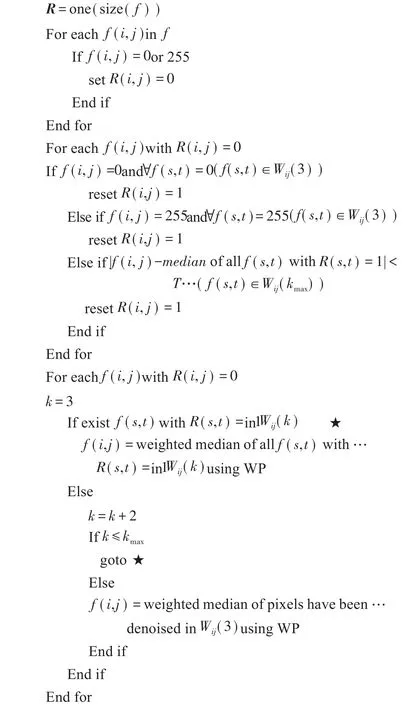
实验验证,阀值T取值4噪声检测的准确性最高,kmax取值9去噪性能最佳。
算法根据噪声的灰度最值特征检测噪声,没有漏检任何的噪声,但误检了灰度为最值的信号像素;算法继而根据邻域像素的相关性以及灰度近似性,作进一步的噪声检测,降低了误检率,提高了噪声检测的准确性。
邻域中的信号像素与中心像素的相关性和灰度近似性,在很大程度上决定于距离。算法采用邻域中信号像素的加权中值对中心像素的原始灰度进行估测,相对于标准中值或剔除噪声像素后信号像素的中值,其准确性更高,更加接近中心像素的原始灰度。算法所采用的邻域其大小自适应地变化,在整体上适应不同的噪声密度,在细节上优化选择噪声像素的估测值,提高了算法的自适应性和去噪性能。
相对于现有的算法,所提出的算法的去噪性能更优越,特别是对高密度噪声,其灵活有效的噪声检测与噪声滤除方法令其优越性更显著,在苛刻的去噪条件下,较准确地检测噪声和估测噪声像素的原始灰度。
噪声的二次检测以及去噪邻域大小的自适应变化,在一定程度上提高了算法的复杂度,略高于标准的中值滤波算法,但是低于多数现有的滤波算法,比如文献[6-7,9,12,15-16]等。
5 仿真实验与数据分析
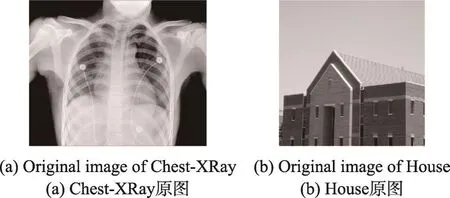
Fig.3 Experimental images图3 实验原图
为验证所提出的WMFDTM算法的有效性和优越性,将其与部分当前最新提出且去噪性能较好的算法进行比较,它们分别是文献[9]的IDBA算法、文献[10]的PDBF算法、文献[15]的SMMF算法以及文献[16]的ASWMF算法。256灰度级的医学图像Chest-XRay以及建筑图像House作为实验图像,如图3所示,它们来自于http://www.imageprocessingplace.com/。实验在以下环境中进行:Intel®CoreTMi5-4590 CPU@3.30 GHz,8 GB RAM和Matlab R2013b。
5.1 去噪图像的视觉效果比较
对低密度噪声进行去噪,其效果差别不大,视觉上往往难以区分去噪性能的优劣,现对高密度噪声图像进行去噪,以显著地比较各算法的去噪性能。各算法对噪声密度为0.6的图像Chest-XRay的去噪效果如图4所示。IDBA严重破坏了图像的黑色背景。PDBF的去噪图像的前景目标较清晰,但是黑色的背景出现了部分白色条纹。SMMF的去噪图像出现部分黑白斑块。ASWMF的去噪图像整体比较清晰,但是图像的上部边沿出现部分白色斑点。WMFDTM的去噪图像非常清晰,边缘和细节部分都保持得很好,与原图像相比,几乎看不出差别。
各算法对噪声密度为0.8的图像House的去噪效果如图5所示。IDBA的去噪图像出现大片雪花状的斑点,去噪效果较差。PDBF的去噪图像的边缘处出现模糊,有抖动的效果。SMMF的去噪图像出现大片的黑白斑点,失真严重。ASWMF的去噪图像整体比较清晰,只是出现一些零星的斑点。WMFDTM的去噪效果较好,很好地恢复了原图像,边缘和细节部分都较清晰,边缘上只有轻微的模糊。
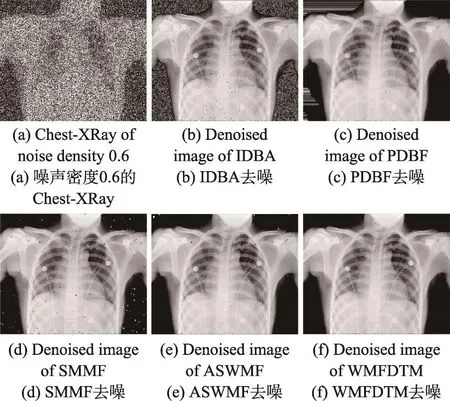
Fig.4 Denoising effect of each algorithm on image Chest-XRay图4 各算法对图像Chest-XRay的去噪效果
从各算法的去噪效果图上看,WMFDTM算法具有良好的去噪性能,相对其他算法,在去噪性能上具有显著的优越性。

Fig.5 Denoising effect of each algorithm on image House图5 各算法对图像House的去噪效果
5.2 去噪结果的客观度量标准比较
为更加客观准确地比较各算法的去噪性能,峰值信噪比(peak signal to noise ratio,PSNR)和图像增强因子(image enhancement factor,IEF)作为客观的度量指标。为克服实验数据的随机偏差,对每一噪声密度,对图像添加噪声和去噪10次,取10次去噪指标数据的平均值作为实验数据。PSNR和IEF定义为:
各算法对各种密度的噪声图像Chest-XRay进行去噪的PSNR和IEF如图6所示。对于低密度和中密度噪声的去噪性能,IDBA和PDBF较差,SMMF、ASWMF与WMFDTM相差不大。对于高密度噪声的去噪性能,IDBA和SMMF较差,PDBF和ASWMF处于中等,WMFDTM较好。另外,WMFDTM相对于其他算法的优越性,随噪声密度的增大呈递增走势,在噪声密度较高时更加显著。
各算法对各种密度的噪声图像House进行去噪的PSNR和IEF如图7所示。在噪声密度较低时,PDBF的去噪性能较差,WMFDTM的去噪性能高于其他算法,但相差不大。随着噪声密度的增大,IDBA和SMMF的去噪性能骤然下滑,PDBF和ASWMF的去噪性能较好。相对于其他算法,WMFDTM具有显著良好的去噪性能,其优越性在高密度噪声时更加显著。
从各算法去噪的客观度量指标上看,WMFDTM算法优于其他算法,特别是高密度噪声时,其在去噪性能上的优越性更加显著。

Fig.6 PNSRandIEFfor denoising of each algorithm on image Chest-XRay图6 各算法对图像Chest-XRay进行去噪的PSNR和IEF
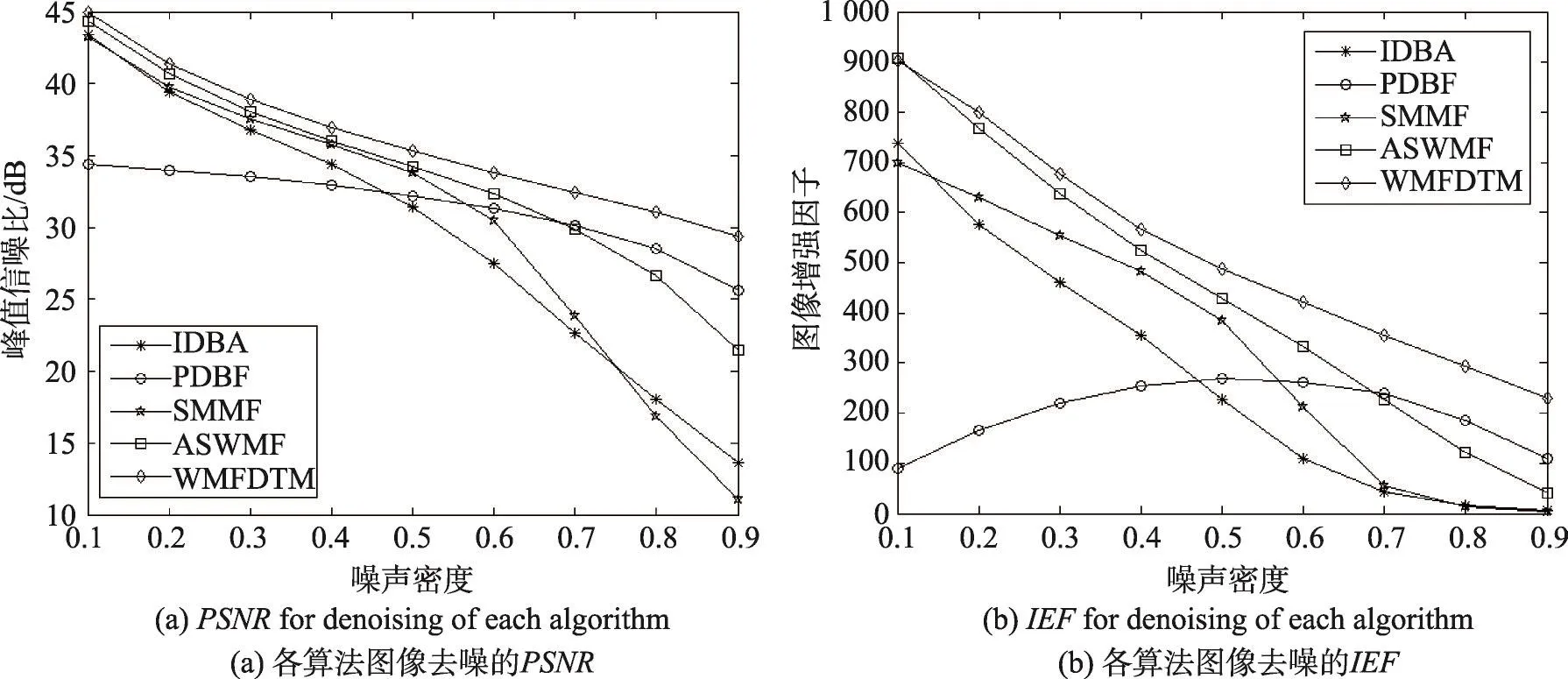
Fig.7 PNSRandIEFfor denoising of each algorithm on image House图7 各算法对图像House进行去噪的PSNR和IEF
5.3 算法的计算复杂度比较
为了准确地比较各算法的计算复杂度,对每一密度的噪声图像,各算法分别去噪10次,然后取10次运行时间的平均值,如表1所示。随着噪声密度的提高,各算法的计算复杂度一致递增。在对各种密度噪声进行去噪的计算复杂度上,PDBF最低,WMFDTM次之,ASWMF最高,特别地,在噪声密度0.9时,SMMF的计算复杂度最高。
综合比较各种去噪性能标准,包括去噪图像的主观视觉效果、客观的图像质量指标PSNR和IEF以及计算复杂度,相对于现有的算法,WMFDTM具有更好的去噪性能,特别是对于高密度噪声图像的去噪,具有显著的优越性。WMFDTM的计算复杂度低于多数的现有算法。
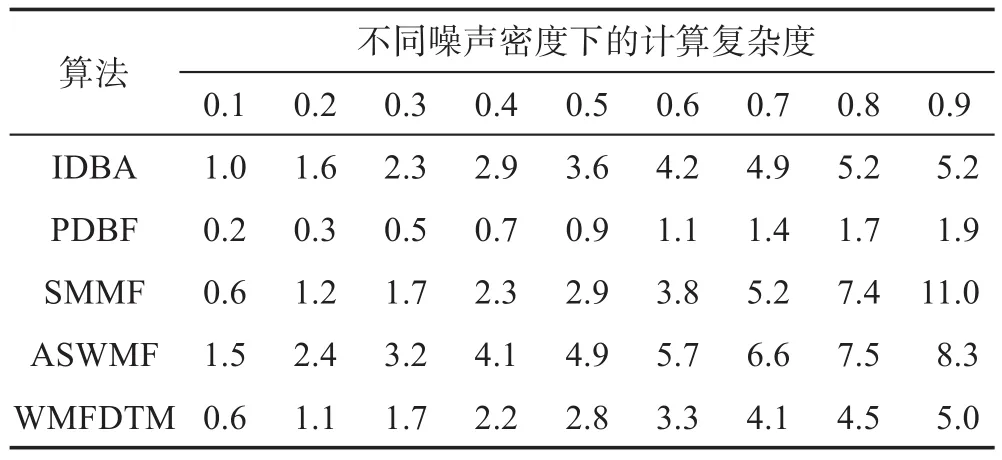
Table 1 Computational complexity of denoising of each algorithm on image House表1 各算法对图像House进行去噪的计算复杂度 s
6 结束语
本文综合研究现有滤波算法的优缺点,提出了WMFDTM算法,分别在噪声检测和噪声滤除两方面对现有的滤波算法进行改进和提升。算法根据灰度最值0和255进行噪声检测,充分利用了噪声的灰度最值特征;根据邻域像素的相关性和灰度近似性进行检测,进一步提高了噪声检测的准确性。算法根据空间距离的远近,分别赋予邻域中信号像素不同的加权系数,取加权中值进行去噪,由此取得的加权中值更加接近像素的原始灰度。算法的去噪邻域随噪声密度自适应地变化,以更好地滤除不同密度的噪声。仿真实验分别从图像的视觉效果与客观的度量指标两方面证明了,相对现有的算法,WMFDTM算法具有更好的去噪性能。所提算法的不足之处在于计算复杂度不具明显的优势,进一步降低算法的计算复杂度是需要改进的工作。
