交流电动机拖动液压设备状态监测系统设计
2019-04-10郭西惠谷立臣田晴晴
郭西惠,谷立臣,田晴晴,孙 昱
(西安建筑科技大学机械电子技术研究所,陕西西安 710055)
0 引言
液压设备以其功率密度大、响应速度快等特点被广泛应用于工程建设的各个领域,随着工业自动化和智能化程度不断提高,液压设备信息传递过程越来越复杂,对其运行状态监测提出了更高的要求[1]。
三相交流电信号作为交流电动机拖动液压设备的输入信号,相较于流量、压力、转速、转矩等嵌入设备内部的监测信号[2-3]更容易获取、更为敏感,成为研究设备状态监测的新载体。大量理论和实验证明,液压设备运行工况、负荷变化、功率匹配等运行状态信息会通过机械和流体参数耦合到电动机的电参量中[4-5]。目前利用电气参量进行状态监测的方法[6-8]没有形成统一的在线监测平台,以实现对液压设备的状态监测。
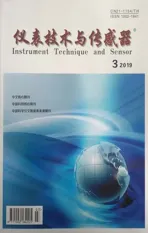
本文通过霍尔电压、电流传感器以非嵌入式方式从电动机定子侧获取单相电压、电流信号,信号经过调理电路和A/D转换,由数据采集卡传送至工控机。在工控机虚拟仪器软件平台上,对采集的电信号幅值、相位、相间和相序等信息进行李萨如图融合,通过在线观测功率李萨如图形、电功率和功率圆图形的变化规律,实现对电机及其拖动系统的运行状态以及功率匹配情况的在线监测,监测原理如图1所示。

图1 电机拖动的液压设备状态监测原理
1 电信号李萨如图融合技术
基于电功率流分析角度,提出用李萨如方法融合液压系统动力源输入的单相电压和电流信号,构成电功率李萨如图,提取图形的特征参量,通过图形特征参量与电功率之间的函数关系,推导电压、电流信号与液压系统运行状态参量之间的函数关系,从而实现对液压系统运行状态的监测,形成的信息融合技术称为电信号李萨如图融合技术,该技术实现的流程如图2所示。
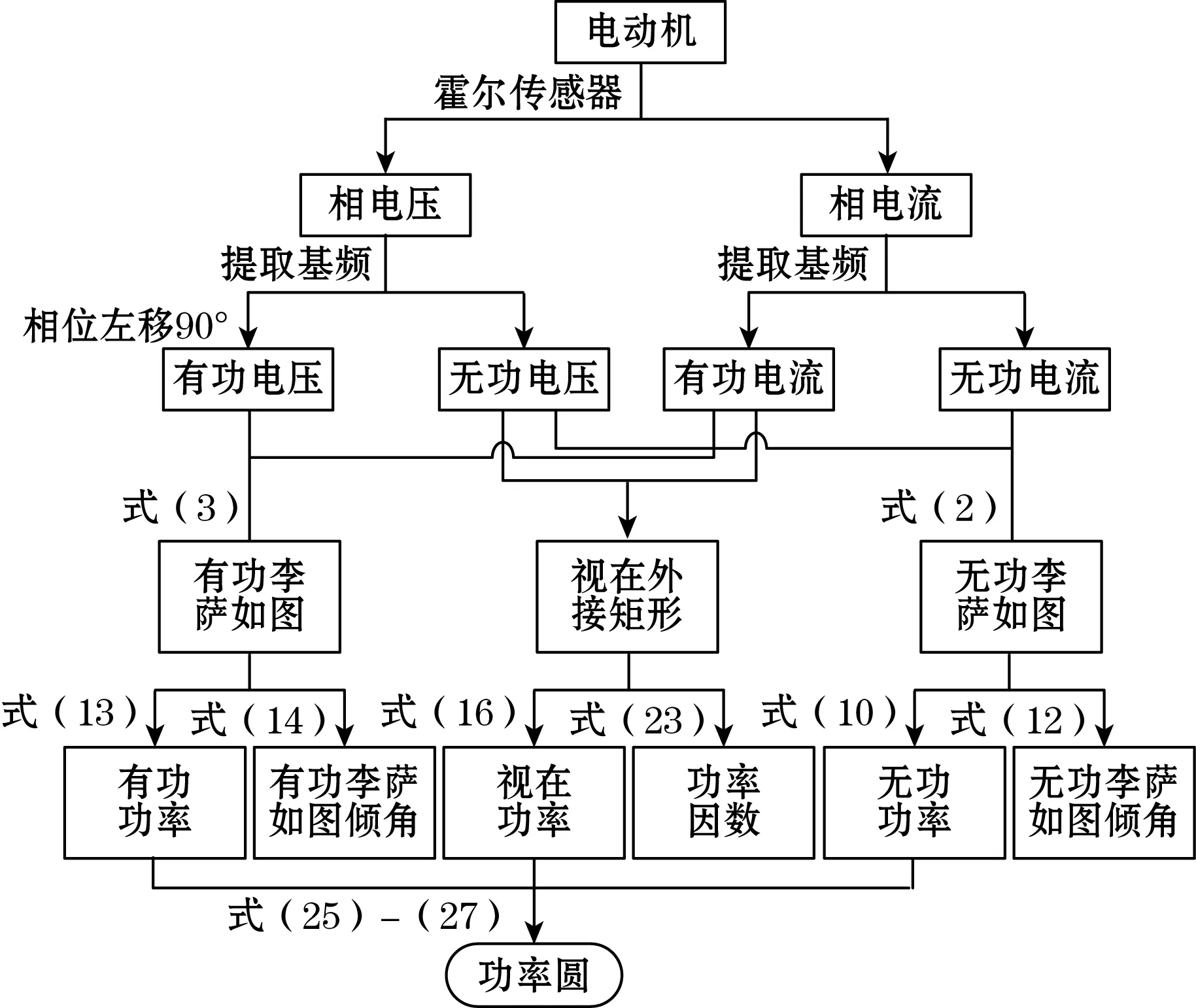
图2 电信号李萨如图融合技术流程框图
1.1 无功、有功李萨如图融合方法
若对电动机输入的交流电信号提取基频,则电动机定子侧的瞬时相电压uk与对应的相电流ik可表示为
(1)
对式(1)进行推导得到无功李萨如方程[6]:
(2)
对式(1)中的电压信号的相位左移90°,推导可得有功李萨如方程[6]:
(3)
式中:M、N分别为电压、电流信号的幅值;φu、φi分别为相电压、相电流的初始相位;φ为相电压和相电流的相位差。
由于实际电压、电流信号中除过基频分量之外,还包含了谐波干扰信号,因此采样信号需要进行低通滤波,滤除高次谐波,获取只保留基频信号的电压、电流信号。
设采样信号为:电压u(z)、电流i(z),其中z=1,2,…,n,对该采样信号提取基频,以电压为横坐标、电流为纵坐标,在平面坐标系内融合为无功李萨如图形;对基频电压信号做-π/2相移,得到的电压信号称有功电压,有功电压信号与电流信号融合成有功李萨如图形。采样信号融合的无功李萨如图、有功李萨如图如图3所示。
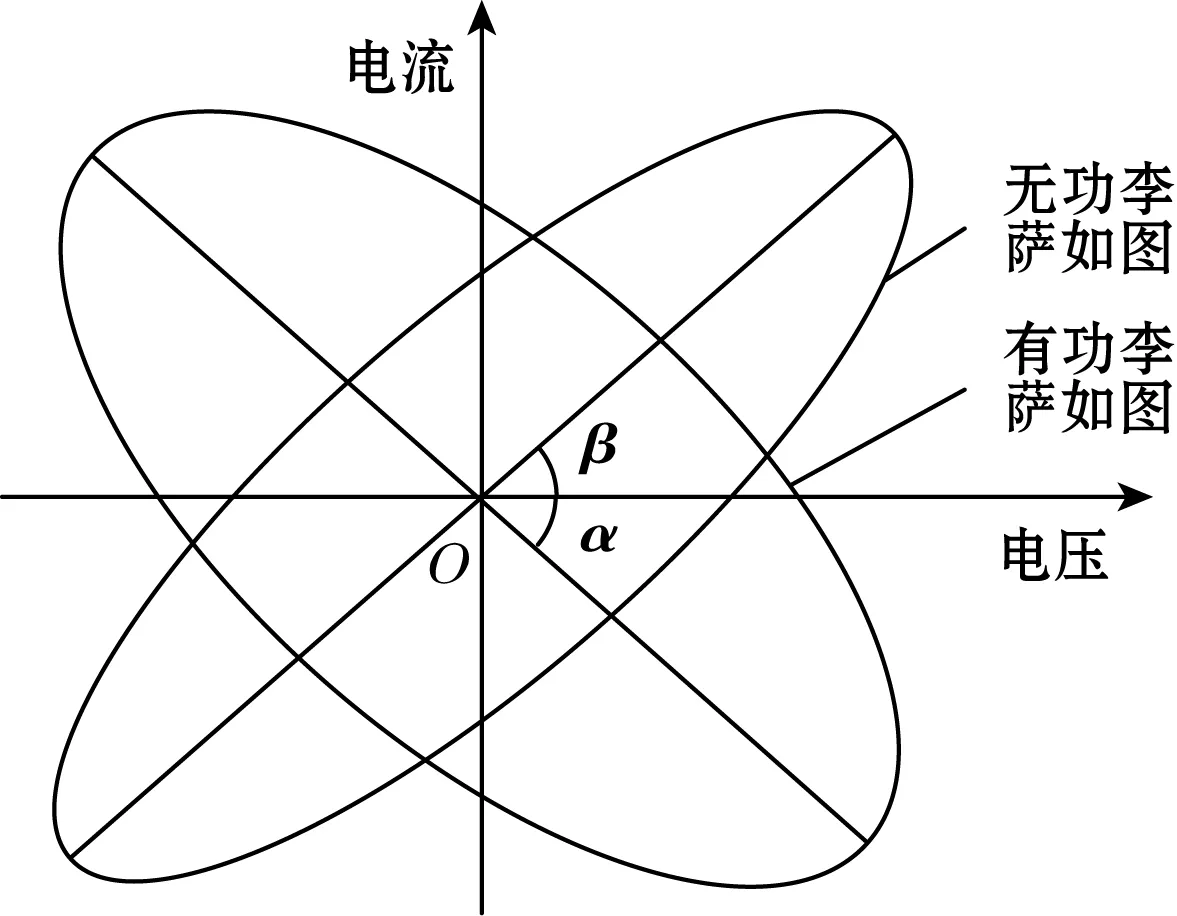
图3 有功、无功李萨如图形
1.2 电参量获取技术
由电动机的三相功率与李萨如图形之间的函数关系[6],可推导出电动机单相功率与李萨如图之间的函数关系。
单相无功李萨如图面积sQ与电动机的单相无功功率Q之间的关系为
sQ=2πQ
(4)
单相有功李萨如图面积sP与电动机的单相有功功率P的关系为
sP=2πP
(5)
视在矩形的面积sS与电动机单相视在功率S的关系为
sS=8S
(6)
1.2.1 无功功率与无功倾角
在无功李萨如图中,如图4所示,设椭圆中心到椭圆的距离为L,则有:
L2(z)=x2(z)+y2(z)
(7)
图4 无功李萨如图
若当z=za时,式(7)取最大值,则此时距离对应为椭圆的长轴a,当z=zb时,式(7)取最小值,则此时距离对应为椭圆的短轴b,即
a2=max[L2(z)],b2=min[L2(z)]
(8)
椭圆面积公式为
s=πab
(9)
由式(4)、式(7)~式(9)可以推导出电压x(z)、电流信号y(z)与无功功率Q之间的关系为
(10)

(11)
则无功李萨如图椭圆倾角β为

(12)
1.2.2 有功功率与有功倾角
同理,式(5)、式(7)~式(9)可以得到相位左移π/2后的电压(有功电压)信号x1(z)和电流信号y(z)与有功功率P之间的关系:

(13)
有功李萨如图椭圆倾角α为
(14)
1.2.3 视在功率
对于中心过原点的李萨如椭圆,其外接矩形边长的一半分别代表x轴和y轴的最大值,若椭圆外接矩形边长分别记为Lx和Ly,如图5所示。有:
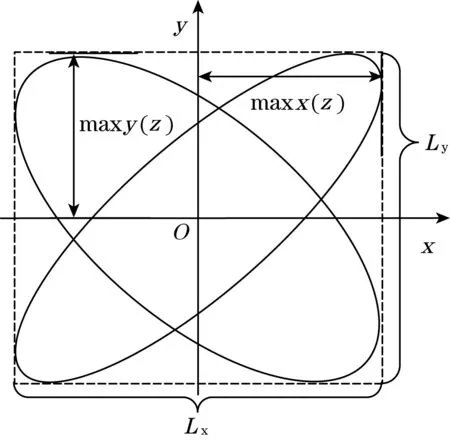
图5 电信号与外接矩形关系图
(15)
由式(6)和式(15)可以推导出电压x(z)、电流信号y(z)与视在功率S之间的关系为
(16)
1.2.4 功率因数
功率因数是电压与电流相位差的余弦即cosφ。当电压信号x(z)=0时,电流信号记为y0,此时方程式(3)可表示为
(17)
在图4中,矩形边长的一半正好为电压、电流的最大值即幅值M、N:
(18)
由式(17)、式(18)可得:
(19)
由式(19)得,电动机的功率因数正比于有功椭圆纵截距和视在矩形纵截距的比值。因为不确定能否采集到电压为零时所对应的电流值,因此对纵轴截距的计算采用下述方法。
设z=zmin1时,椭圆x轴坐标绝对值取得最小值,即
x01=min[|x(z)|]
(20)
则与之对应的y轴坐标为y01=y(zmin1);在x(z)采样数据中去掉x(zmin1),得到新的采样数组x′(z),在y(z)采样数据中去掉y(zmin1),得到新的采样数组y′(z),z=1,2,3,…,N-1。设z=zmin2时,|x′(z)|取得最小值,即
x02=min[|x′(z)|]
(21)
则与之对应的y轴坐标为y02=y′(zmin2)。
计算y轴截距:
(22)
因此,离散采样信号计算电动机的功率因数的公式为
(23)
1.3 电功率可视化技术
电机功率会随着系统负载的改变而变化,在计算出电功率之后提出用功率圆观测电动机的三相电功率变化情况。
视在功率与有功功率和无功功率之间的关系为
S2=P2+Q2
(24)
若以原点为中心,分别以电参量实时计算的视在功率和有功功率为半径画圆,所画的图形记为功率圆图形,外圆面积s1代表视在功率的平方,内圆面积s2代表有功功率的平方,圆环面积s1-2则代表无功功率的平方,如式(25)~式(27)所示。由功率李萨如图形的特征量进行进一步融合构成功率圆图形,如图6所示,通过功率圆图形可以直接观测到电机拖动系统负荷及工况发生变化时三功率间的动态变化关系及规律。
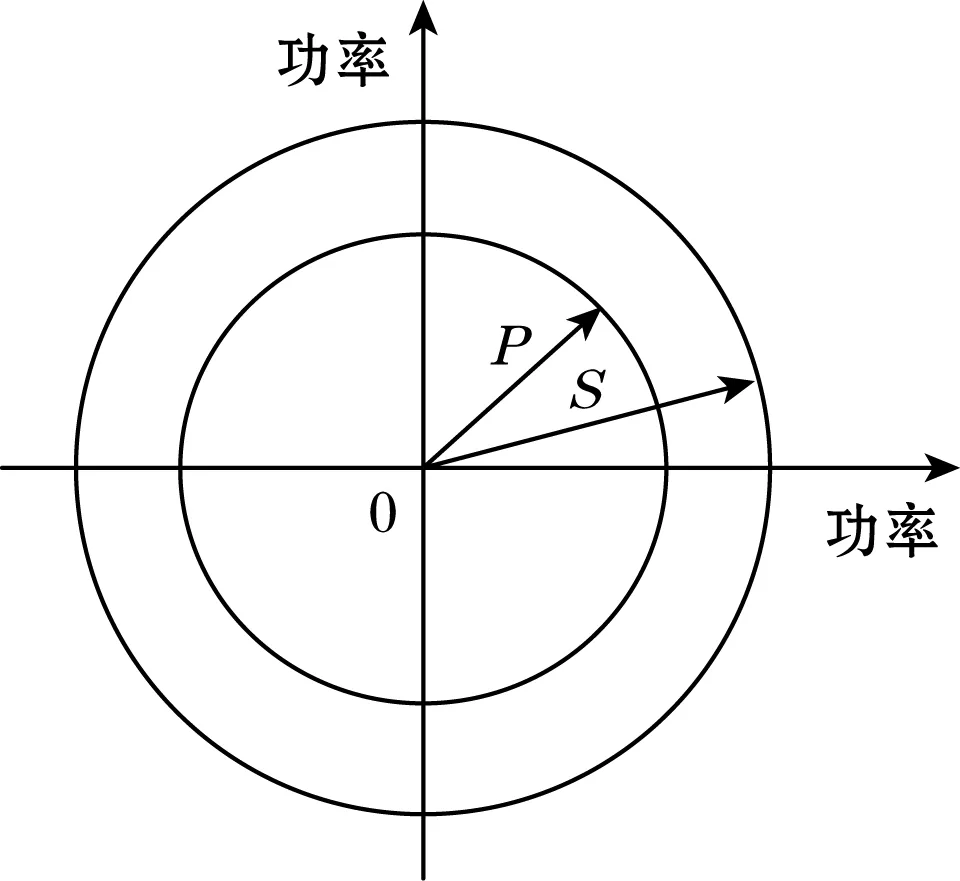
图6 电动机功率圆图形
(25)
s2=πP2
(26)
s1-2=π(S2-P2)=πQ2
(27)
2 监测系统虚拟仪器软件设计
在工控机虚拟仪器软件平台上,采用LabVIEW软件作为开发工具进行监测系统软件设计。监测程序由数据采集、数据处理、在线监测、数据保存等功能模块组成,监测功能结构框图如图7所示。
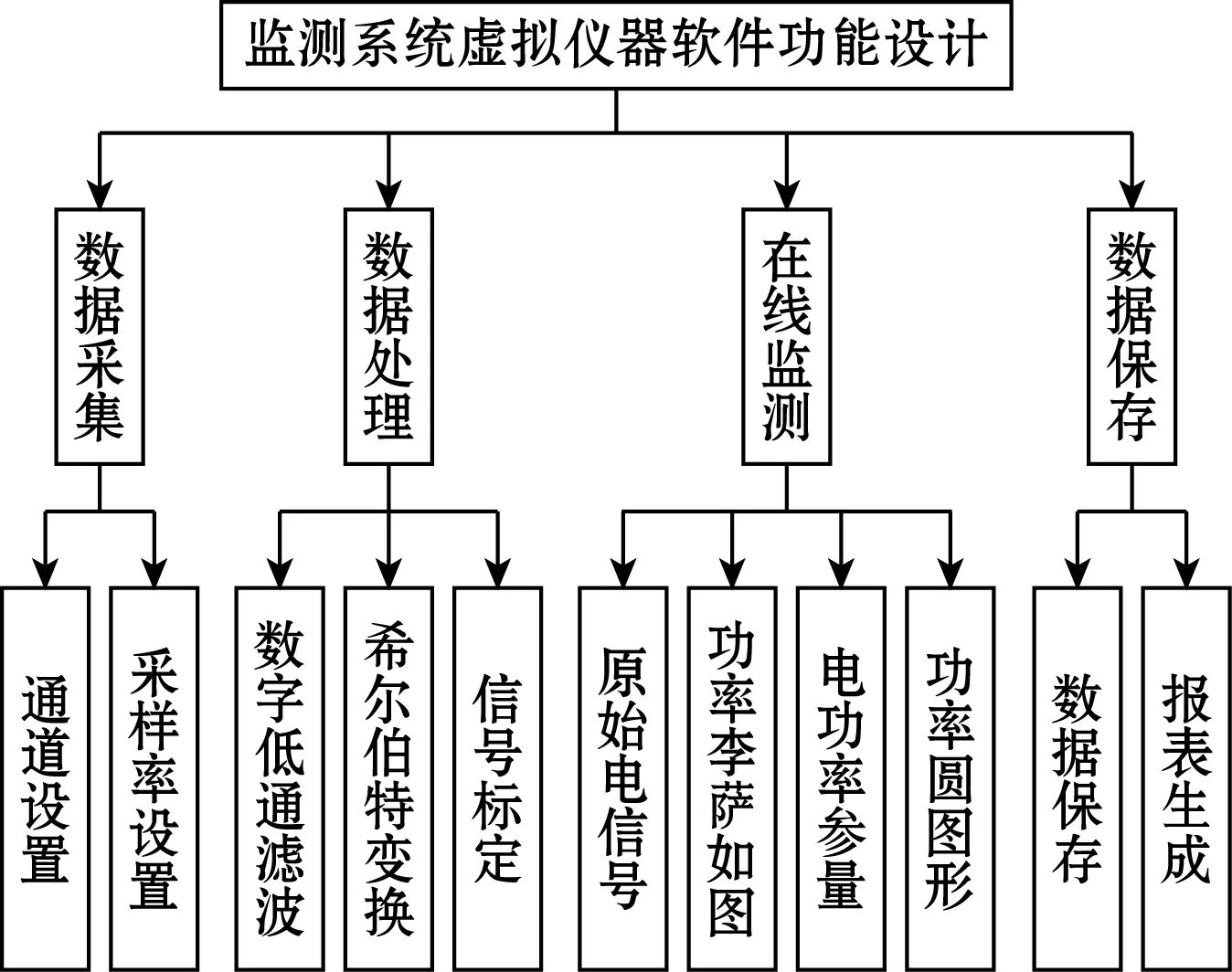
图7 监测功能结构框图
2.1 数据采集
数据采集是整个监测系统的基础,用来对电参量信号实时采集,采集数据前需根据实际需求设置采集通道、采样率等参数。
2.2 数据处理
数据处理是指对采集信号进行标定、数字低通滤波,得到真实的基频信号;也包括利用快速Hilbert变化实现对电压基频信号相位左移90°。
2.3 在线监测
在线监测模块实现了数据的计算与显示,包括计算与绘制李萨如图形、电参量和功率圆图形。
2.3.1 李萨如图形.vi
以电压信号为横轴,基频电流信号为纵轴融合无功李萨如图;以进行相移后的基频电压信号为横轴,基频电流信号为纵轴融合有功李萨如图。
2.3.2 电参量.vi
电参量.vi包含了有功功率、无功功率、视在功率、功率因数等电动机电参量以及有功倾角和无功倾角等李萨如图特征量的计算与显示。式(10)计算无功功率、式(12)计算无功李萨如图倾角、式(13)计算有功功率、式(14)计算有功李萨如图倾角、式(16)计算视在功率、式(23)计算功率因数。
2.3.3 功率圆.vi
以原点为中心,视在功率、有功功率分别为半径,绘制视在功率圆、有功功率圆。
2.4 数据保存
数据保存模块用于对监测系统实时计算的电参量数据进行保存,便于后期查询、离线分析与数据回放。
监测系统程序框图如图8所示。
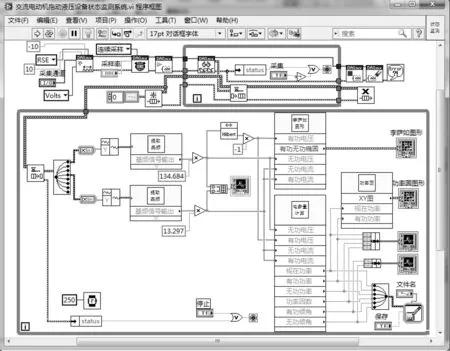
图8 监测系统程序框图
3 电动机拖动液压设备状态监测
3.1 监测系统硬件组成
基于虚拟仪器的液压状态监测系统结构如图9所示,传感器从电动机拖动液压系统验台获取的信号经过信号调理,由数据采集卡传送至工控机,在工控机虚拟软件监测平台实现液压系统在线监测。其中,电信号传感器为霍尔电压传感器、霍尔电流传感器,对获取的电信号进行调理和滤波的装置是三相电参量同步获取装置[8]。

图9 液压状态监测系统组成框图
3.2 试验台简介
电动机拖动液压系统实验台是由电动机、液压泵和液压马达构成的一种液压传动设备,原理图如图10所示,其工作过程简述为:电磁溢流阀起安全阀作用,设定系统安全压力;通入交流电后,三相异步电动机驱动齿轮泵动作,齿轮泵从油箱吸油,液压油经三位四通换向阀进入液压马达,带动马达转动,采用电磁比例溢流阀来模拟负载压力,超过设定压力值时,油液经比例溢流阀溢流回油箱。

图10 电动机拖动液压系统实验台原理图
3.3 在线监测实验
启动电动机拖动液压系统实验台,在监测系统参数设置区设置采集通道、采样率,对液压系统模拟负载压力5-10-15-10-5 MPa变化时系统运行状态进行在线监测,监测系统前面板显示区主要包括原始基频电信号、李萨如图及其倾角、电功率图和功率圆,如图11所示。
图12(a)~图12(e)中有功李萨如倾角位于第四象限,无功李萨如倾角位于第一象限,图12(a)~图12(c)中负载增大,有功李萨如倾角沿顺时针方向变化,无功李萨如倾角沿逆时针方向变化,图12(c)~图12(e)反之,可得电压相位超前电流。
图13(a)~图13(c)中负载增大时,有功功率圆和视在功率圆均明显增大;图11负载5-10-15 MPa变化时功率因数值分别对应0.72-0.81-0.86,功率因数提高,设备利用率提高,功率圆和功率因数反映了设备的功率匹配情况。
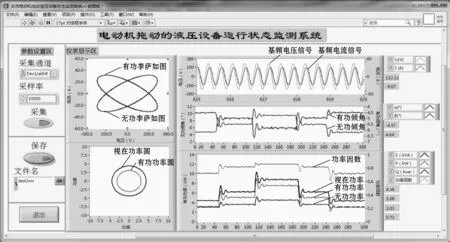
图11 监测系统人机界面

图12 李萨如图加减载变化规律

图13 功率圆加减载变化规律
4 结束语
基于电信号李萨如图融合技术开发的电动机拖动液压设备状态监测系统,李萨如图形面积、倾角等图形特征、功率圆图形与电参量等监测量能够准确反映设备运行时负载功率和功率匹配状况情况。该状态监测技术应用范围不局限于电动机拖动的液压设备,对电动机拖动的水泵、机床、起重机、提升机、印刷机械等机械设备同样适用,为进一步开展设备节能控制提供了新方法。变频器启动的电动机拖动设备,如何消除谐波干扰实现状态监测是后期研究的方向。