交叉眼干扰研究综述
2019-04-04刘天鹏魏玺章丁锦灿
刘天鹏 魏玺章 刘 振 丁锦灿
①(国防科技大学电子科学学院 长沙 410073)
②(中山大学电子与通信工程学院 广州 510006)
③(国防科技大学研究生院 长沙 410073)
1 引言
高效低费的精确制导武器已成为战场上最主要的硬杀伤武器,是空海战场中战机、舰船等武器装备的主要威胁来源。为提高飞机、舰船平台的战场生存能力,对抗精确制导武器的跟踪打击,自卫式电子干扰正成为电子战(Electronic Warfare, EW)领域的研究热点。
先进的空空导弹、反舰导弹等精确制导武器广泛采用主动式雷达导引头。在雷达导引头角跟踪中,通常采用兼具较高的测角精度和较强的抗干扰能力的单脉冲测角方式[1]。干扰单脉冲雷达一度成为电子战领域的研究难点[2-6]。根据Dave Adamy[4]在EW101中的总结,单脉冲雷达干扰样式大致有以下几种:地形反弹干扰[7]、镜像干扰、边频干扰、闪烁干扰[8,9]、拖曳式诱饵[10]、交叉极化干扰[11],以及交叉眼干扰[12,13]。当前,形成装备的主要干扰样式大多属于体外式非相干角度欺骗干扰,如机载拖曳式诱饵、舰射“海妖”伞降式诱饵弹、“纳尔卡”悬停式诱饵弹等,如图1所示,其特点是干扰机被配置在被保护平台之外,通过发射大功率干扰信号诱偏来袭导弹,实现平台自卫。

图1 体外式非相干角度欺骗干扰装备Fig.1 Off-board nonconherent angular deception jammer
然而,现有的体外式非相干角度欺骗干扰在实战条件下干扰效果并不理想。例如,机载拖曳式诱饵存在干扰锥形盲区、诱偏性能不稳定、影响载机机动等问题[14];伞降式诱饵弹受气象条件影响较大,恶劣气象条件下难以使用,工作时间受限于降落伞的性能[15];悬停式诱饵弹使用过程较为复杂,需要发射前根据被保护舰船的航向、航速以及风向等参数,计算最佳发射时间和飞行航线,并存在空中悬停时间短的缺陷[16]。
相比之下,交叉眼干扰是一种能够有效对抗单脉冲测角雷达的干扰样式,属于相干干扰体制,干扰机被配置在被保护平台之上。交叉眼干扰具有可靠性高、系统反应时间短、有效干扰时间长、寿命周期成本低,以及能够对抗多导弹威胁等优势[5,6],近年来受到国内外学者的广泛关注。
本文将从交叉眼干扰的理论发展、装备发展、应用难题以及研究趋势等方面详细阐述,试图为研究者提供关于交叉眼干扰的全面认识。本文论述理论发展时,根据交叉眼干扰发展的时间脉络划分了3个发展阶段;论述装备发展时,从试验情况、现役装备2个方面进行了阐述;论述应用难题时,以研制交叉眼干扰系统为落脚点,从干扰天线结构、系统参数容限、干信比需求以及干扰环路差异等4个方面综合论述;最后对交叉眼干扰的研究趋势进行了前瞻性分析。
2 交叉眼干扰的理论发展
交叉眼干扰是通过发射两路或多路幅度近似相等、相位相差180°的干扰信号,可以使单脉冲雷达指向偏离目标,甚至使单脉冲雷达跟踪失锁。交叉眼干扰最早于1958年(1977年解密)被提出[17,18],经过半个多世纪的发展,其干扰理论有了长足的进步。梳理交叉眼干扰理论发展脉络,大致可以分为人工角闪烁、两源反向交叉眼干扰、多源反向交叉眼干扰3个阶段。
2.1 人工角闪烁阶段
交叉眼干扰的最初概念是受角闪烁物理现象启发而提出的[17,18]。角闪烁现象对所有跟踪雷达都会产生影响,当复杂目标上的2个散射点间隔一定距离、相位差180°时,目标回波的相位波前将会发生扭曲,进而造成跟踪雷达天线指向发生偏差[19,20]。交叉眼干扰通过人为地模拟了最差情况下的角闪烁现象,实现对单脉冲雷达的角度欺骗干扰。因此,传统交叉眼干扰又被称为“人工角闪烁”干扰[21]、“波前扭曲”干扰[22]。
1963年,Redmill等人[21]对传统交叉眼干扰进行了数学建模以及系统设计,是较为系统研究交叉眼干扰的早期文献之一。然而,受限于当时的硬件条件,人们难以精确控制2个干扰源之间的180°相位差。此后一段时间内,鲜有人继续研究交叉眼干扰。
角闪烁现象更适合去理解交叉眼干扰。交叉眼干扰人为复现角闪烁现象,可从干涉现象对其进行物理解释。幅度近似相等、相位反相的两路干扰信号在空间合成时会发生相消干涉,并在雷达天线处形成零陷。然而,零陷处的相位波前是扭曲的,若雷达天线以波前法线方向指示目标,则天线指向会产生偏差而无法指向真实目标,如图2所示。
线性拟合分析是分析传统交叉眼干扰的主要手段[23],通过对单脉冲雷达的和、差通道波束进行线性拟合,来推导在交叉眼干扰作用下单脉冲雷达的视轴指向,即单脉冲指示角。线性拟合分析下的单脉冲指示角表达式为

其中, ℜ 为取实部运算,θi为 单脉冲指示角,θr为雷达视轴转角,θe为2个干扰源相对于雷达的半张角,G定义为交叉眼增益,由式(2)给出。

图2 交叉眼干扰的物理解释Fig.2 The physical interpretation of cross-eye jamming
其中,a和φ 分别为两路干扰信号的幅度之比和相位之差,分别简称为幅度比、相位差。
在交叉眼干扰的作用下,单脉冲指示角由两部分组成:一部分为指示目标角度的雷达视轴转角θr,另一部分为交叉眼干扰引入的测角误差θeG。当干扰源半张角θe为固定值时,测角误差与交叉眼增益有关,且成正比关系。从交叉眼增益的定义来看,当幅度比a→1 、相位差φ =180°时,交叉眼增益将趋于无穷大,而这正是交叉眼干扰要求两路干扰信号幅度近似相等、相位反相的原因所在。
考虑到波束线性拟合仅在单脉冲雷达视轴附近时成立,因此人工角闪烁阶段的干扰理论仅适用于定性地理解交叉眼干扰,并不具备装备研制的指导性。
2.2 两源反向交叉眼干扰阶段
随着数字射频存储器(Digital Radio Frequency Memory, DRFM)在雷达信号处理系统的广泛应用[24,25]以及具备自调相特性的反向天线阵的提出[26,27],交叉眼干扰进入了两源反向交叉眼干扰阶段[12,13,28-33]。
1997年,美国空军大学空军科技研究所开展了反向交叉眼干扰研究,提出了对抗脉间频率捷变的交叉眼干扰方案[31]。文献[12,13,28]中,瑞典国防研究所在1999~2007年期间持续对交叉眼干扰展开了深入研究,从天线互易的角度分析了交叉眼干扰在复杂环境下的干扰性能,并在美国电子对抗协会-“老乌鸦协会”(Association of Old Crows, AOC)的国际会议上进行了多次现场报告[29]。进入21世纪以来,交叉眼干扰越来越受重视,多篇美国专利从交叉眼干扰实现、交叉眼干扰识别与消除等方面进行了研究[34,35]。在此期间,国内学者开始了交叉眼干扰研究,部分学者将交叉眼干扰称为相干两点源干扰,大多以角闪烁理论为基础[36-39],理论上鲜有突破。
2009年,南非普陀利亚大学du Plessis等人[32,33,40-43]系统研究了两源反向交叉眼干扰,从反向天线结构对单脉冲雷达和、差通道回波影响的角度出发,对反向交叉眼干扰进行了严谨的数学推导,指出反向天线结构是使交叉眼干扰克服苛刻参数容限并走向实用化的唯一可行结构方案,主要贡献在于纠正了线性拟合分析中的近似错误,形成了两源反向交叉眼干扰的一般性结论[32]。
文献[32,33]中,作者对两源反向交叉眼干扰进行了精确数学分析,其干扰比相单脉冲雷达的场景如图3所示。在不考虑平台反射回波的情况下,单脉冲指示角θi为

其中,β 为自由空间相位常数,dp为比相单脉冲雷达天线间隔,ks,kc分别定义为

图3 两源反向交叉眼干扰的干扰场景Fig.3 Jamming geometry of two-element retrodirective cross-eye jamming
对比式(1)和式(3)可以看出,在两源反向交叉眼干扰的作用下,单脉冲指示角与交叉眼增益、干扰天线半张角的关系蕴涵在三角函数之中,而非线性拟合分析所得到的线性关系。
在精确分析单脉冲指示角时,文献[32]给出了两源反向交叉眼干扰的一般性结论:交叉眼增益越大、干扰基线越长,交叉眼干扰造成单脉冲雷达的测角误差越大;当幅度比、相位差接近理想值时,单脉冲雷达的和通道回波降低;干扰天线的增益不影响测角误差的大小;交叉眼干扰引入的测角误差不会体现在单脉冲雷达的和通道回波中;和通道波束宽度内单脉冲指示角不为零,意味着交叉眼干扰可造成单脉冲雷达跟踪失锁。
在硬件器件和干扰理论的推动下,交叉眼干扰装备实现了快速发展。目前,文献报道的交叉眼干扰装备均是基于两源反向交叉眼干扰开展研制的。然而,在实际应用中,两源反向交叉眼干扰的干扰性能仍然受到较小的波前扭曲宽度、苛刻的参数容限和较高的干信比需求等因素的限制。
2.3 多源反向交叉眼干扰阶段
采用天线阵列以增加干扰机系统自由度的思路为解决两源交叉眼干扰实用化限制因素提供了技术途径。基于天线阵列的角度欺骗干扰技术最早由文献[44]于1997年提出。在此基础上,Harwood等人[45]于2007年提出了多源交叉眼干扰的概念,通过提高干扰系统自由度灵活地控制相位波前,但作者并没有给出多源交叉眼干扰的数学推导。
2013年开始,国防科技大学刘天鹏等人[46-50]为克服两源反向交叉眼干扰实用化的制约因素,提出了基于线性反向天线阵和圆形反向天线阵的多源反向交叉眼干扰,相比两源反向交叉眼干扰能够造成单脉冲雷达更大的测角误差,同时具有更优的参数容限和干信比性能。基于圆形反向天线阵提出了多源圆阵反向交叉眼干扰,通过实时调整干扰环路的参数调制方向,合理设置多干扰环路的角度间隔,可实现被保护平台360°姿态角范围内持续、稳健的干扰性能。
得益于更优的干扰性能,多源反向交叉眼干扰研究越来越受到国内外学者的关注,已成为交叉眼干扰理论的前沿方向。西安电子科技大学刘松杨等人[51]提出了基于正交四点源的多源反向交叉眼干扰方案,该方案保证了在干扰平台旋转、抖动或者被不同方向上的单脉冲雷达扫描时,仍能保持一定的干扰效果,并进行了参数容限等方面的研究。此外,刘松杨等人[52]又在正交四点源的基础上结合线阵提出了正交多点源交叉眼干扰技术。南非普陀利亚大学开展了多干扰环路交叉眼干扰技术研究[53-56],推导了多干扰环路相位中心位于同一点时的交叉眼增益,研究了多个干扰环路之间路径差异对干扰性能的影响。
无论是多源反向交叉眼干扰还是多环路反向交叉眼干扰,其本质是一致的,即增加系统自由度提高干扰性能,区别在于多个干扰环路的相位中心是否在同一点,如图4所示。多源反向交叉眼干扰的多个干扰环路相位中心位于同一点,具有相同的干扰距离r,更利于布局在同一刚性平台,如图4(a)所示。而中心不在同一点的多环路反向交叉眼干扰更适合于分布式多平台布局,每个干扰环路具有各自的干扰距离rn、干扰转角θcn,如图4(b)所示。
基于图4(a)中多源反向交叉眼干扰的干扰场景,在不考虑平台反射回波的情况下,单脉冲指示角为[46]

多源反向交叉眼干扰的交叉眼增益GM表达式为[46]

图4 多源/多环路反向交叉眼干扰的干扰场景Fig.4 Jamming geometry of multiple-element or multi-loop retrodirective cross-eye jamming
其中,N为干扰天线阵元个数,衰减因子定义为Fn=dn/d1,干扰环路n的 系统参数定义为An=anejφn,干扰环路差异定义为Cn=cnejφn。
文献[46]认为两源反向交叉眼干扰是多源反向交叉眼干扰中阵元数为2的特例,其一般性结论同样适用于多源反向交叉眼干扰。从交叉眼增益GM表达式可以看出,多源反向交叉眼干扰可以配置更多的幅度比an和相位差φn。图5为四源反向交叉眼干扰与两源反向交叉眼干扰之间的交叉眼增益对比,其中红色曲线为两源反向交叉眼干扰的交叉眼增益曲线。得益于更多的系统自由度,相比两源反向交叉眼干扰,多源反向交叉眼干扰可以获得更大的交叉眼增益、更优的干扰性能。
3 交叉眼干扰的装备发展
3.1 试验情况

图5 多源反向交叉眼干扰的交叉眼增益[46]Fig.5 Cross-eye gain of multiple-element retrodirective cross-eye jamming[46]

图6 意大利ELETTRONIC公司进行的试验场景Fig.6 Experiments performed by ELETTRONICA
据了解,1988年开始,意大利ELETTRONIC公司Neri等人[57]对交叉眼干扰开展样机研究,在小型直升机上进行了初步试验。随后1993年、1999年以及2000年分别在直升机、舰船、喷气式飞机等不同平台开展了多次外场试验,如图6所示,并在2000年AOC会议上第1次公开声明在舰船和直升机等军事平台上成功验证了交叉眼干扰的有效性。
2010年,南非普陀利亚大学[41,58]搭建了交叉眼干扰验证系统,如图7所示,开展了暗室试验和外场试验,对两源反向交叉眼干扰的干扰有效性进行了试验验证。从暗示试验结果来看[41],交叉眼干扰验证系统有效地验证了文献[58]关于两源反向交叉眼干扰的一般性结论。在外场试验中,当单脉冲测角雷达未进入跟踪模式时,将其瞄准轴对准干扰机天线中心,如图7(a)所示。当单脉冲测角雷达转入跟踪模式时,其瞄准轴迅速偏离干扰机天线的物理范围,指向右侧位置,如图7(b)所示。
3.2 现役装备
干扰理论的不断深入直接推进了交叉眼干扰的实用化进程。据了解,国外已研制了少量的机载交叉眼干扰系统,包括欧洲台风战机的防御支援子系统(Defensive Aids Sub System, DASS)[59]和俄罗斯Su-30MK/34等战机装备的“希比内”电子对抗系统[60]。受限于保密原因,国内尚未见交叉眼干扰系统装备的有关报道。
台风战机的DASS系统中的ESM/ECM干扰吊舱安装在台风战机的两侧翼尖上,如图8(a)所示,可根据实时任务需求提供包括交叉眼干扰在内的多种干扰样式,为台风战机提供了对抗地空、空空导弹的自卫防御能力[59]。
“希比内”电子对抗系统中的SAP-518干扰吊舱同样挂载在战机两侧翼尖,如图8(b)所示。报道称SAP-518干扰吊舱可为战机提供单机自卫功能,通过对雷达信号复制、调制、转发,可导致来袭导弹偏离飞行轨迹[60]。
4 交叉眼干扰的应用难题
从国外交叉眼干扰装备研制情况来看,两源反向交叉眼干扰已经走向实用化,多源反向交叉眼干扰处于起步阶段。国内交叉眼干扰的装备研制仍面临着众多应用难题有待解决。本节将从干扰天线结构、参数容限、干信比需求、干扰环路差异等4个方面论述交叉眼干扰的应用难题。
4.1 干扰天线结构

图7 普陀利亚大学的交叉眼干扰验证系统[58]Fig.7 Cross-eye jamming system of University of Pretoria[58]

图8 机载交叉眼干扰系统Fig.8 The airborne cross-eye jamming systems
交叉眼干扰的干扰天线结构可分为两类:非反向天线结构和反向天线结构[32,61,62]。传统交叉眼干扰通常采用非反向天线结构,如图9所示,通过2个发射天线发射两路相位差180°的干扰信号,实现对单脉冲测角雷达的角度欺骗干扰。在静态条件下,通过保证两路干扰信号质量,且发射天线对准被干扰雷达时,该天线结构能够实现交叉眼干扰效果。然而,在实际应用场景中基本不存在静态条件,由于交叉眼干扰系统通常装备在飞机、舰船等运动平台,当机翼振动、船舷摇摆时,两路干扰信号的传输路径发生变化,无法保证在被干扰雷达天线处以180°相位差合成,因此采用非反向天线结构的交叉眼干扰系统基本无法获得预期干扰效果。因此,如何实现在动态条件下两路干扰信号在雷达天线处反相合成是研制交叉眼干扰系统的难题之一。

图9 非反向天线结构[32]Fig.9 The non-retrodirective antenna configuration[32]

图10 两种反向天线结构Fig.10 Two retrodirective antenna configurations
为克服动态平台的影响,交叉眼干扰应采用反向天线结构,如图10所示。反向天线于1959年被提出,又称Van Atta天线[26],通常由成对天线组成。反向天线具有自调相特性,能够自动补偿信号传输路径差引入的相位差。当各天线对的连接线长度相等,则回波信号将按入射波方向“反射”回去,因此又称为反射器天线阵[27]。反向交叉眼干扰优势在于:无需获取雷达天线位置或来波方向,反向天线结构自动将干扰信号按入射方向发射出去,且不受温度、平台振动等环境影响。为满足这一特性,反向交叉眼干扰机内部要求2个传输方向的馈线延迟相等、信号处理时间相同。
反向天线结构有单收发天线和收发天线对两种结构形式,各有优缺点[32]。采用图10(a)所示的单收发天线形式的交叉眼干扰机,共用同一收发天线、环形器和馈线进行收发信号,优点是具有一致的相位中心,且只有少量非共用的电路元件,易于进行相位、延迟等系统匹配,可以使用较长的馈线进行收发信号,能够满足系统对基线长度的要求;缺点是环形器需要较高的隔离度将收发信号进行隔离,当2个环形器的隔离度小于转发器的增益时,干扰机系统将发生震荡。采用图10(b)所示的收发天线对形式的交叉眼干扰机,成对天线分别进行收发信号,优点是不需要环形器将两路信号分开,通过设计天线隔离度来保证2个方向信号的隔离;缺点是非共用元件增多,给系统匹配带来难度,且天线相位中心不一致,不满足天线互易原理,易受多径效应等环境因素的影响。针对不同的应用环境,交叉眼干扰机应优选适当的反向天线结构。例如针对大型舰船平台,交叉眼干扰机应采用单收发天线结构,因为较长的共用馈线使得控制相位相对容易,且能克服海面多径效应的影响。
对于多源反向交叉眼干扰,干扰天线可扩展为线性反向阵列、圆形反向阵列、不规则阵列等多种天线阵列结构。为满足干扰天线阵列的反向特性,需要多个干扰环路的馈线长度相等[27]。以4阵元线阵为例,如图11所示,每2个收发天线形成一个干扰环路,天线1和天线4形成干扰环路1,天线2和天线3形成干扰环路2,当馈线长度满足l1=l2时,阵列天线的回波信号将按入射波方向折返回去。
4.2 系统参数容限
交叉眼干扰系统的参数容限是指为造成单脉冲雷达特定的测角误差,幅度比、相位差所能容忍的误差范围[40,46,63]。为了造成单脉冲雷达跟踪失锁,幅度比、相位差应设置在理想条件下,即幅度比相位差φn=180°,此时交叉眼干扰可以产生无穷大的测角误差[46]。然而,微小的传播路径差和环境变化引起的幅相误差都将引入较大的参数误差,若超出参数容限,系统将无法达到预期的干扰效果。因此,如何在精确控制幅度比、相位差以保证干扰性能是研制交叉眼干扰系统的难题之二。

图11 线性反向天线阵列Fig.11 The linear retrodirective array

图12 两源反向交叉眼干扰的参数容限分析Fig.12 Tolerance analysis of two-element retrodirective cross-eye jamming
图13 多源反向交叉眼干扰的参数容限分析[46]Fig.13 Tolerance analysis of multiple-element retrodirective cross-eye jamming[46]
文献[32,40]分析了两源反向交叉眼干扰的参数容限,为控制系统参数的误差精度提供了依据。当雷达载频为9 GHz、雷达天线波束宽度为 1 0°、干扰基线为10 m,干扰转角为 30°、干扰距离为1 km时,两源反向交叉眼干扰对系统参数容限的要求如图12所示,图中曲线为交叉眼增益等高线。为了获得交叉眼增益为7的干扰性能,相位差误差应控制在 9°以内。然而,对于X波段(9 GHz)雷达导引头,1 mm的路径差就会引入 1 0.8°的相位差。可见,对于两源反向交叉眼干扰,其参数容限要求十分苛刻。
文献[46]分析了多源反向交叉眼干扰的参数容限,指出更多的系统自由度降低了干扰系统对参数容限的要求。对于特定的交叉眼增益,多源反向交叉眼干扰的系统参数可以在更大的范围内取值,即放宽了参数容限要求。图13给出了典型条件下基于4阵元线性反向阵列的多源反向交叉眼干扰的参数容限要求。为了获得交叉眼增益为7的干扰性能,相位差误差应控制在1 6°以内。可见,相比两源反向交叉眼干扰,多源反向交叉眼干扰的参数容限要求更加宽松。
4.3 干信比需求
有效的交叉眼干扰需要较高的干信比,这是由其自身特点所决定的:幅度近似相等、相位差180°的两路或多路干扰信号在单脉冲雷达的和通道中相互抵消,致使和通道中干扰信号功率很低。因此,如何在干扰信号近似对消条件下提供有效的干扰功率以对抗平台强反射回波是研制交叉眼干扰系统的难题之三。
电子战专著文献[3-5]指出交叉眼干扰至少需要20 dB以上的干信比才能有效。尽管这一结论并没有严格的数学理论依据,却被电子战领域同行广泛认同。为此,文献[42,43]分析了两源反向交叉眼干扰的干信比需求,假设搭载平台是位于干扰收发天线之间的点目标,并将干扰信号与平台发射回波在和、差通道内分别进行相加,得到总的和、差通道回波。文献[42]指出考虑平台反射回波后,交叉眼增益不再为固定值,而是随平台回波相位变化的随机分布,并以交叉眼增益分布的中值进行性能分析。从两源反向交叉眼干扰的干信比分析结果来看,如图14所示,20 dB的干信比对交叉眼干扰是合理的,此时交叉眼增益中值大于2。然而,20 dB的干信比又略显保守,只要11.4 dB的干信比即可使交叉眼增益中值大于1,此时单脉冲雷达受干扰后指向平台之外的角度上[42]。
多源线阵反向交叉眼干扰的多自由度优势可以降低干扰系统对干信比的需求。文献[46,48]研究了多源线阵反向交叉眼干扰的干信比需求,推导了多源线阵反向交叉眼干扰的干信比定义,通过仿真结果验证了上述结论[46,48]。以四源线阵为例,图15给出了典型条件下多源反向交叉眼干扰的干信比需求。为了使交叉眼增益中值大于1,在适当的系统参数条件下,干信比只需满足4.55 dB即可。
文献[42,48]是基于交叉眼增益中值开展干扰系统对干信比的需求分析。在考虑交叉眼增益的极限值时,文献[64]指出20 dB的干信比取值并不理想,此时可能会引起干扰性能发生剧烈变化。在考虑交叉眼增益整个分布的基础上,为获得稳定的干扰性能,多源反向交叉眼干扰的干信比取值应在30 dB附近。
为了能够有效对抗平台反射回波,满足干扰性能对干信比的需求,交叉眼干扰对天线有效辐射功率提出了更高的要求,增加了干扰的应用难度。一种解决方案是将交叉眼干扰与距离波门拖引干扰组合使用,通过距离波门拖引干扰将波门拖离平台距离单元,以较小的干信比实施交叉眼干扰,可以获得距离-角度二维联合欺骗干扰效果[30]。
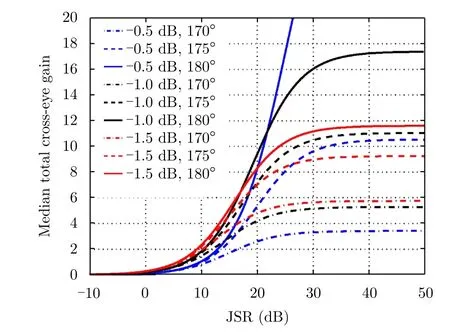
图14 两源反向交叉眼干扰的交叉眼增益中值与干信比的关系[42]Fig.14 Relationship between the median cross-eye gain and JSR for two-element retrodirective cross-eye jamming[42]
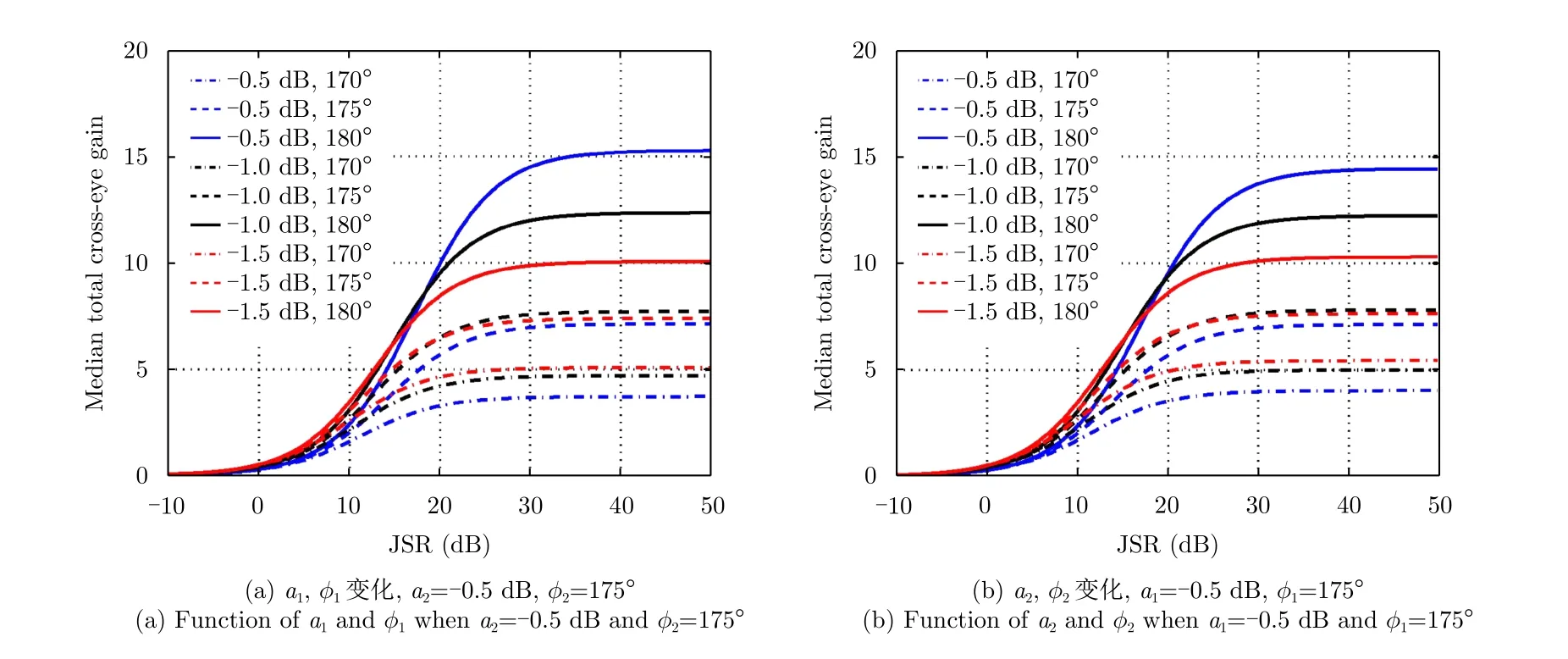
图15 多源反向交叉眼干扰的交叉眼增益中值与干信比的关系[46]Fig.15 Relationship between the median cross-eye gain and JSR for multiple-element retrodirective cross-eye jamming[46]
4.4 干扰环路差异
多源反向交叉眼干扰在具有参数容限和干信比优势的同时,也有存在干扰环路差异的缺点[46,54-56]。干扰环路差异是指多个干扰环路之间的幅相差异,主要是由器件差异、干扰路径差等因素引起的。器件差异是由硬件不一致造成的,属于固定差异,可通过精确测量校准实现精确补偿。天线极化失配引入额外相位差可被归类于天线器件差异[65,66]。干扰路径差是由干扰系统设计、干扰场景引起的,随着干扰场景变化而变化,属于动态误差,需通过动态校准方法实现差异的减小或补偿。文献[54]指出干扰环路差异严重影响了多源反向交叉眼干扰的干扰性能,当引入180°相位差时,干扰机将成为信标机。因此,如何精确补偿多个干扰环路之间的差异是研制多源/多环路反向交叉眼干扰系统的难题之四。
文献[46]分析了当干扰环路差异无法精确补偿时,参数容限和干信比需求等干扰性能将发生严重恶化。以四源反向交叉眼干扰为例,当2个干扰环路之间存在相位差异Δ φ=180°,幅度差异c2/c1=- 0.5 dB时,参数容限性能将急剧恶化,如图16(a)所示;即使增加干信比,干扰系统也无法获取较大的总交叉眼增益中值,如图16(b)所示。
文献[55]对干扰环路差异中的干扰路径差进行了研究,干扰场景如图4(b)所示,以两环路反向交叉眼干扰为例,推导了2个干扰环路之间的干扰路径差rΔ,即

其中,rn为干扰环路n相距雷达的干扰距离,dn为干扰环路n的基线长度,θcn为干扰环路n的相对雷达的转角。文献[56]从静态补偿和动态补偿2个角度分析干扰路径差补偿问题,对于低频段雷达或特定静态干扰场景,可以实施静态补偿;而对于高频段雷达和动态干扰场景,需进行动态补偿。动态干扰场景下,为实现对干扰路径差的动态补偿,需要获得雷达目标的距离和角度信息,并依赖于外部测距、测角系统。
多源反向交叉眼干扰存在干扰环路差异的应用限制,结合雷达告警系统可实现对干扰环路差异的动态精确补偿。因此,综合考虑其干扰性能优越性,多源反向交叉眼干扰仍具有可观的实用性。
5 交叉眼干扰的研究趋势
尽管交叉眼干扰早在20世纪50年代就被提出,但直到数字射频存储器DRFM、反向天线结构的出现和广泛应用,交叉眼干扰才迎来了新的发展生机。为了对交叉眼干扰研究提供有益的参考,填补目前国内外在交叉眼干扰研究方面的空白,可开展以下4点研究内容:
(1)交叉眼干扰系统幅度、相位高精度控制技术。幅度、相位的高精度控制直接决定了干扰性能的优劣。随着被干扰雷达的载频走向高频,幅相的精确控制显得尤为重要。此时,无论是两源反向交叉眼干扰还是多源反向交叉眼干扰,若无法精确控制系统参数,都难以获得良好的干扰效果。同时,考虑到雷达导引头的杀伤半径,最优的干扰效果是使雷达导引头失锁,这就要求幅度控制精度在0.5 dB、相位控制精度在1°量级。该问题偏于工程化,需要从多比特量化的DRFM、发射接收可控的全固态相控阵天线、干扰环路的反向特性校准等方面综合考虑。
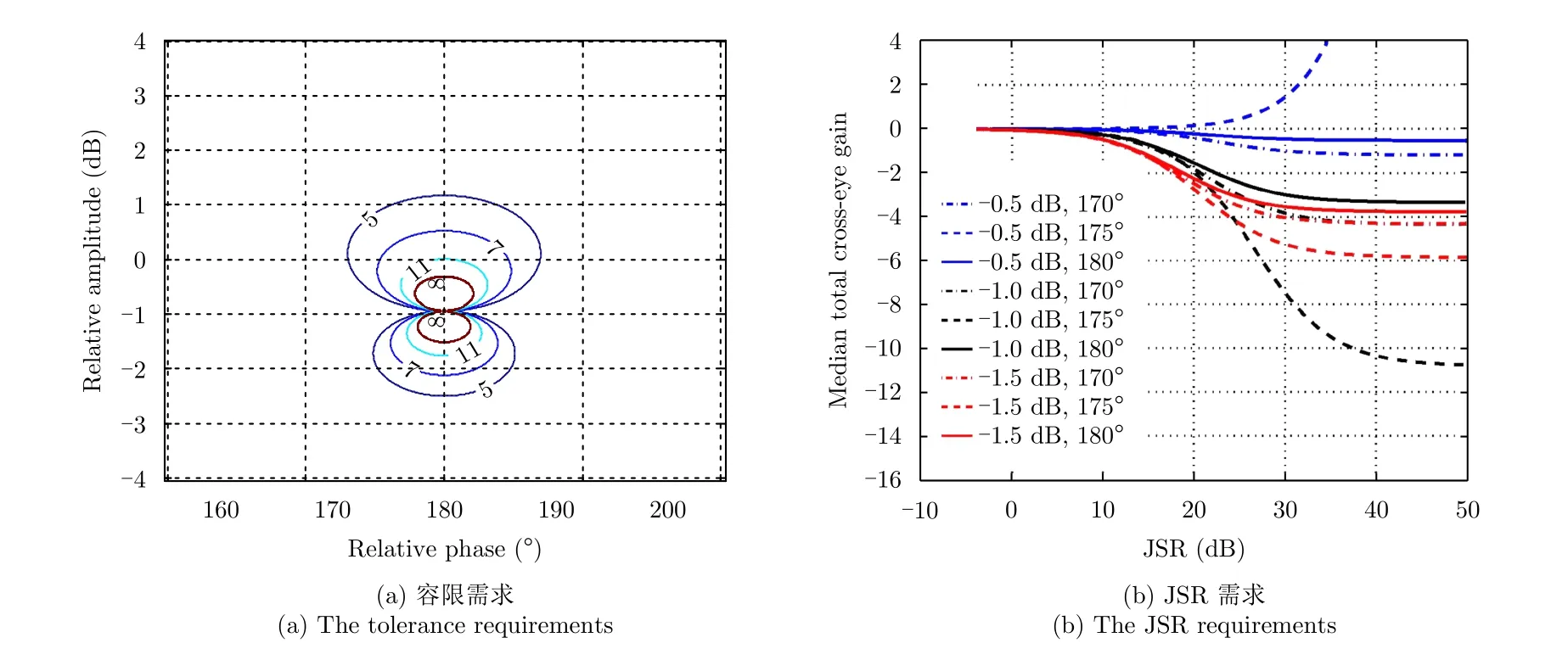
图16 干扰环路差对多源反向交叉眼干扰造成的性能恶化[46]Fig.16 The performance deterioration of multiple-element retrodirective cross-eye jamming resulted by jamming loop differences[46]
(2)大尺寸平台条件下干扰基线长度优化选择方法。将交叉眼干扰应用于舰船等大尺寸平台时,干扰基线长度选择会对干扰效果产生影响。若干扰天线沿船首船尾布置,长基线将使得干扰信号存在传输延时,进而导致舰船回波与干扰信号可被雷达从距离上分开,实现干扰剔除;若干扰天线局部布置,短基线造成的测角误差偏小,反舰导弹仍能够打击舰船平台而起不到自卫防护作用。可结合威胁雷达参数,分析多源反向交叉眼干扰的最佳干扰基线长度;或者研究多短基线的多环路反向交叉眼干扰,通过多个短基线干扰环路共同使用,克服长基线干扰可被分辨而单短基线性能不足的难题。
(3)交叉眼干扰宽带建模与性能分析。宽带单脉冲测角技术已趋于成熟。在宽带条件下,雷达目标为多散射点模型,其散射特性是由多个散射点合成得到的。当假设目标为点目标的前提条件不再成立时,平台宽带反射回波条件下的干扰性能将会发生变化。应建立多散射点模型下的交叉眼干扰数学模型,分析干扰性能以及干信比需求变化。
(4)距离角度二维联合欺骗干扰技术。传统的有源假目标欺骗干扰机通过延时转发可以产生距离维度上的距离假目标。多个距离假目标通常具有单一的角度信息,即使假目标能够逼真地模拟真实目标的目标特性信息,雷达仍能够从角度维度上将真目标和距离假目标进行区分、识别。考虑到交叉眼干扰可以产生角度维度上的视在假目标,如何形成在距离-角度维度上的二维假目标,造成雷达在检测阶段无法区分真假目标,将具有十分重要的理论和应用价值。
