胶囊内窥镜五维磁定位技术的研究
2019-04-02蔡乐才陈冬君李随群
卢 令, 蔡乐才, 陈冬君, 高 祥, 李随群
(1. 四川理工学院 人工智能四川省重点实验室, 四川 自贡 643000; 2. 宜宾学院, 四川 宜宾 644000)
0 引 言
常规的内镜检测存在一定的局限性[1-2],无线胶囊内窥镜的问世无疑是消化道疾病诊断领域的革新,无线胶囊内窥镜工作期间不会影响患者的正常活动,也不会导致胃肠道的损伤[3-5]。胶囊内窥镜经过多年发展,现在已经取得了很大的成功,现有的商用胶囊内窥镜只能依靠自身重力或胃肠蠕动被动推进[6-7],功能开发受到体积和电源的限制,不能实现精确定位。
胶囊内窥镜的位置和姿态是确定病灶的重要信息,目前临床应用的胶囊内窥镜均不具有精确定位功能,临床医生只能依靠胶囊运行时间大致判断胶囊的位置,必要情况下通过拍摄X光确定胶囊是否还停留在体内。PillCam胶囊内窥镜[8]通过在人体不同位置粘贴接收天线,采用射频三角测量法比较受试者所佩戴的8枚传感器接收胶囊的信号强弱估算胶囊的位置,平均误差为37.7 mm,最大误差达114 mm,难以满足临床应用的要求。国内的OMOM胶囊[9]也采用与PillCam类似的射频定位方法。因此,具有高精度实时定位功能的胶囊内窥镜依然是目前需要迫切解决的问题。
实现胶囊内窥的精确磁定位技术有两种:电磁定位技术和永磁定位技术。电磁定位技术是以毕奥萨法尔定律和法拉第电磁感应定律为理论基础来实现定位跟踪[10];永磁定位是根据磁场传感器阵列测得的静态磁场建立磁场分布模型,通过特定的算法求解方程得到永磁体的位置[11]。Schlageter等[12-13]提出了一种基于16个磁传感器阵列的二维平面磁定位跟踪装置,可以对密闭的0.2 cm3大小磁铁的胶囊实现5自由度定位跟踪,胶囊跟踪的高度可以达到200 mm。Son等[14]提出了一种电磁控制的5自由度永磁定位系统,该系统的位置精度达2.1 mm,方向精度达6.7°。姜萍萍等[15]提出在目标体内密闭标记物永磁体,在没有噪声情况下的位置精度为8 mm,方向精度为7°。分析以上磁定位技术,电磁定位技术的接收线圈较大,发射电路设计复杂,难以集成到胶囊内窥镜中,不利于封装。
本文采用基于磁偶极子模型的永磁定位技术,实现了永磁体的单目标五维定位的算法,该算法根据磁偶极子模型建立非线性方程组,利用非线性优化算法LM算法求解方程组,完成了对磁激励源的三维位置和两维方向的计算,并通过实验标定提高定位精度,实验结果表明标定后定位精度提高了3.3 mm,定向精度提高了3.1°。
1 胶囊内窥镜的五维定位原理
1.1 胶囊内窥镜空间位置和方向
1.1.1胶囊内窥镜位置
采用笛卡尔坐标系[16]来描述胶囊内窥镜的位置和方向,该坐标系由3条相互垂直不共面的数轴构成,用X,Y,Z表示。由于轴向充磁磁环中心对称,磁环套在胶囊外壳上时磁环的中心和胶囊的中心重合,为表述方便下文统称为胶囊的中心。如图1所示,胶囊的中心点P位置为(x,y,z)。胶囊中心点P的矢量表示为
P=ix+jy+kz
(1)
其中:i,j,k分别为与X,Y,Z轴同向的单位矢量。
1.1.2不同坐标系下的胶囊位置变换


图1 胶囊位置在笛卡儿坐标系表示
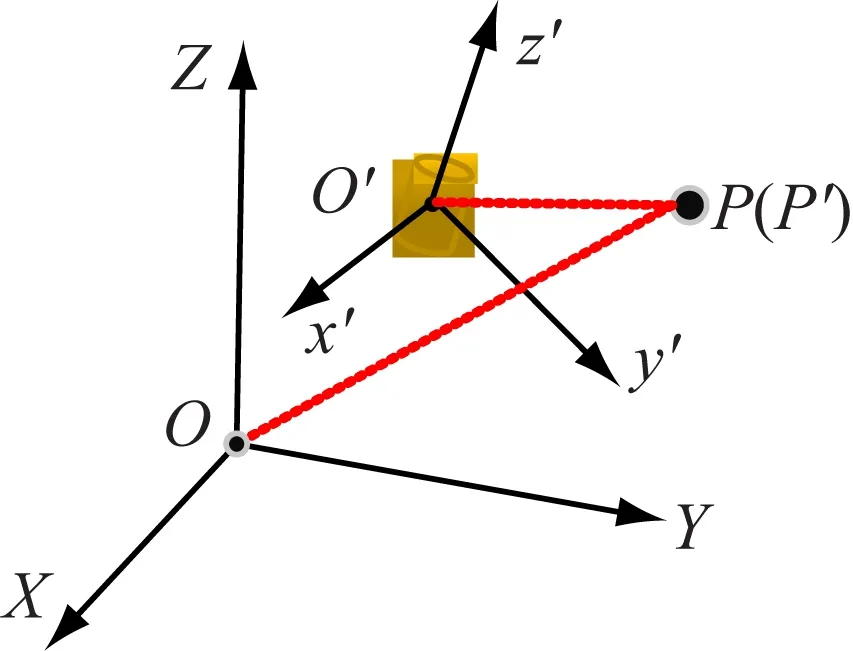
图2 物体坐标系和全局坐标系下的不同表示
实现同一位置矢量在不同坐标系下的转换,即胶囊的物理坐标系和全局坐标系的变换,分为两个步骤[17]:

(2)
式中:
(3)
(x1,y1,z1)为物理坐标系的原点O′在全局坐标系的坐标值。

图3 全局坐标系下物体坐标系平移
(4)

图4 物体坐标系在全局坐标系下旋转变换
由以上两步可知,完成矢量从全局坐标系直接变换到最终物理坐标系的完整数学表达过程为
(5)
旋转矩阵R为正交矩阵,R的行列式为单位1,满足RTR=RRT=I,从而得出旋转矩阵的逆矩阵是它的转置矩阵,即
R-1=RT
(6)
这为简化了旋转矩阵的逆矩阵的求解。旋转矩阵有多种构造形式,还可用来描述胶囊的方位。
1.1.3胶囊的方向描述
胶囊在空间中的状态除了位置信息,还有胶囊的镜头对准方向,求解胶囊的镜头方向,类似于不同坐标系的变换,等价为一种旋转变换。设镜头方向矢量P在坐标系O-XY中用(xyz)T表示,旋转后在坐标系O-XYZ中用矢量(xyz)T表示,得到:
[x1y1z1]=[xyz]·R
(7)
式中:R为3行3列的旋转矩阵。
1.2 永磁铁磁通量密度数学模型

(8)
式中:Blx,Bly,Blz是永磁体在磁传感器M处3个轴上的正交分量;i,j,k分别是X,Y,Z轴方向的单位矢量;μr为相对导磁率;MT表征永磁体磁化强度;Pl为第M个传感器的位置相对于胶囊磁体中心的位置,Rl为Rl的模,即

图5 磁定位示意图
将式(8)展开得到:
(9)
(10)
(11)
m2+n2+p2=1
(12)
(13)
(14)
(16)
式中:N>5,总目标误差等于误差之和,即:
E=Ex+Ey+Ez
(16)
1.3 胶囊内窥镜五维定位算法
方程组求解问题转化为求解系统总误差E,为非线性最小二乘问题,可以选择非线性优化算法求解。实现实时定位,必须要使用高效率的算法,而且要有很好的收敛性和稳定性。通过比对发现Levenburg -Marquardt算法[20]速度快、收敛性高,因此本文选用Levenburg-Marquardt算法求解系统总误差E。
2 试验与仿真
验证理论模型设计长宽为15 cm×15 cm,传感器间距为68 mm的9×9磁传感器平面阵列为原型样机,系统通过ARM板采集数据发送上位机运算后完成实时跟踪显示,如图6所示。磁传感器阵列标定磁激励源相关的常数BT和位置方向,提升系统的定位精度。磁定位系统以传感器阵列的中心传感器5为原点建立全局笛卡尔坐标系,系统标定时标定板高度统一设置为78 mm。

图6 传感器阵列定位系统
设计的磁定位系统样机跟踪定位圆柱形永磁体,系统通过测试标定板预制的107个固定采样点进行定向和定位检测。如表1所示,标定前测试的107个点的位置平均总误差为4.593 2 mm,平均角度总误差为6.487 5°;系统标定后的107个点的位置平均总误差为1.369 9 mm,平均角度总误差为3.395 2°。通过对标前后的三轴方向误差对比(见图7和图8)和角度总误差对比(见图9和图10)结果可知,定位精度提高3.3 mm,角度精度提高3.1°
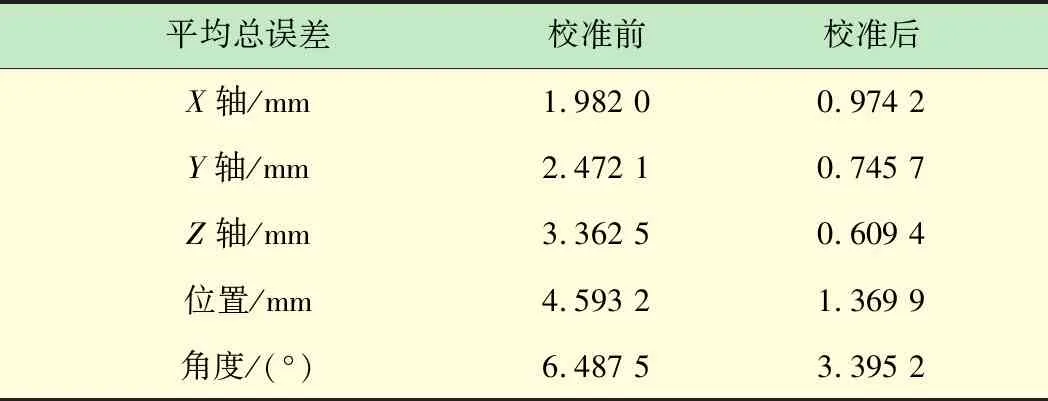
表1 校准前后数据误差对比

图7 标定前各轴位置误差和总误差(107个点)

图8 标定后各轴位置误差和总误差(107个点)

图9 标定前方向误差(107个点)

图10 标定后方向误差(107个点)
根据实时三轴位置和两维角度信息建立一个永磁体模拟三维空间,可以直观地显示永磁体的三维位置和两维角度信息。五维定位仿真系统由微软Direct eXtension开发环境开发,本文在原点位置设置3个不同的角度以显示动态仿真效果。如图11所示,永磁铁的实际位置和仿真效果比对,图11(a)为磁铁向左倾斜一定角度的实物和仿真比对图,图11(b)和图11(c)分别为垂直和向右倾斜一定角度的实物和仿真效果比对图。

(a)(b)(c)
图11 五维磁定位仿真系统效果
通过对比,发现磁体真实的物理形态与模拟三维空间的形态一致,效果真实可靠,达到三维重建的目的。
3 结 语
针对胶囊内窥镜技术缺乏精确定位的缺点,本文提出一种新型五维磁定位胶囊内窥镜,实现在采集图像同时磁定位跟踪,此外医生还可以根据拍摄图片和五维位置信息(三维位置,两维方向参数)对消化道三维重建。首次将实时磁定位的胶囊内窥镜技术由理论付诸实践,在完成胶囊内窥镜设计的基础之上制作了15 cm×15 cm大小的磁传感器平面阵列,可在采集图像的同时可对胶囊实时跟踪,定位精度可达1.37 mm,定向精度可达3.4°。磁定位系统中的轴向充磁的磁环因为成本和工艺问题正在与外协沟通,实验中的磁激励源暂时由圆柱形汝铁硼永磁体替代,后期磁环做出来后可以替换,不影响系统定位功能。动物实验及推广已经得到市科学技术局支持,胶囊外壳和磁环加工等解决后就可以进行下一步动物实验工作。