基于矩阵奇异值分解约束型无迹粒子滤波的滑坡位移预测模型研究
2019-03-26李丽敏温宗周董勋凯张阳阳
李丽敏, 温宗周, 董勋凯, 王 真, 张阳阳, 李 璐
(西安工程大学 电子信息学院, 陕西 西安710048)
开展滑坡灾害预测预报研究是当今国际滑坡灾害研究和环境地质研究领域的前沿课题,是最大化减少和降低地质灾害发生对人民生命财产造成危害的有效途径之一,具有重要的理论意义和实际意义[1]。《全国地质灾害防治“十三五”规划》明确提出进一步完善调查评价、监测预警、综合治理、应急防治四大体系,充分依靠科技进步和管理创新,加强统筹协调,提高防治效率,全面提升基层地质灾害防治能力,最大限度地避免和减少地质灾害造成的人员伤亡和财产损失[2]。
在众多滑坡监测参数中,位移是最直观、变化趋势最容易观测的一个参数,对其进行有效监测和趋势分析,能够提升地质灾害预报的准确性[3]。位移预测方法隶属于时序预测方法,目前时序预测方法主要分为两类,一类是基于模型的方法,该类方法的应用前提是已知对象模型,一旦模型已知,便能精确预测,但问题是很多非线性系统的模型建立困难,则比较难实施该种方法[4-8];另外一类是基于数据驱动的方法,原理是从数据中总结出规律然后再进行预测,事实证明该类方法鲁棒性比较差[9-12]。粒子滤波方法属于后者,粒子滤波是基于蒙特卡洛方法产生的,优点是它考虑了对于状态的后验分布的完全表示,使得任何的统计估计都能够被计算,因此它可以拟合任何的非线性或非高斯分布数据[13]。但由于粒子滤波依赖于重要性采样,因此首先需要设计出能够很贴切的近似状态后验分布的先验分布。最常用的方法是从状态演化的概率模型中采样,但是如果新的观测出现在这个先验的末尾处,或者如果这个似然值与先验值比较起来差别很大,方法就会失效。
为改善粒子滤波用于位移预测时的性能,de Freitas[14],付杰[15],刘超云等[16]提出将扩展卡尔曼滤波(EKF)方法融入到粒子滤波方法中,将EKF替代原来粒子滤波中的先验分布;Merwe等[17]将无迹卡尔曼滤波(UKF)方法与粒子滤波方法进行结合,结果表明该方法比上述方法精度更高,将其称为无迹粒子滤波(UPF)方法;但无迹粒子滤波算法在实际应用中,当矩阵是奇异值时,用一般的UT变换计算会有求解困难,会导致预测结果不准确。为了改善该算法,本文提出将SVD方法引入到无迹粒子滤波算法中,解决上述问题[18]。
1 SVD约束型UPF算法
1.1 UPF算法
无迹粒子滤波算法步骤如下:

(1)
(2)
(3)
(4)
(2) 在时刻t=1,2,…时的计算。
①重要性采样
对于i=1,…,N,用UPF方法更新粒子:
a 计算sigma点。
(5)

b 时间更新。
c 测量更新。
④输出结果同一般算法。
1.2 SVD约束下的UPF算法
UPF算法在实际应用中,当公式(5)中矩阵Pt-1是奇异值时,用一般的UT变换计算公式(5)会出现鲁棒性不强的缺陷。奇异值分解(SVD)是一种可以将耦合变量进行分解方法,本文中将它作为无迹粒子滤波方法的约束条件,使输入的Pt-1首先被分解,从分解后的结果中提取特征值,这些特征值即能够代表原始数据,而且它的特点是具有很强的鲁棒性,因此用这些特征值来代替Pt-1,使得所有数据经过公式(5)都能够被有效开平方。具体步骤为:
(1) 计算特征协方差矩阵的奇异值分解结果,获得对应的特征值:
(6)
式中:U——左奇异向量,其中包含向量之间的关系是正交的;S——奇异值矩阵,其中的元素除了对角线之外都为零;V——右奇异向量。如果公式(6)中的协方差矩阵P的维数是m×n,则U是m×m的,S是m×n的,V是n×n的。这3个矩阵的计算过程如下:
(2) 利用上述结果,重新求解sigma点:
(7)
(8)
式中:Uj,t-1和Sj,t-1——第j个样本的特征向量和特征值;σ——尺度参数。

2 仿真分析与比较
测试数据来源于镇江市跑马山滑坡体监测工程[19]以及京港澳高速公路雨花互通南侧护坡体滑坡监测工程[16]。选择这两组测试数据的原因在于,其都是针对滑坡位移进行监测的,有利于本文算法的有效验证;而且这两组测试数据的位移变化趋势都比较明显,有利于并列比较本文算法。
2.1 基于镇江市跑马山滑坡体监测工程数据的滑坡位移预测仿真
镇江市由于周边属于特殊的丘陵、岗地地貌,所以时常会遭遇到滑坡的危害,调查结果表明,目前镇江市滑坡灾害点200多处,其中较大面积的72处,灾害面积约5.00×104m2,影响范围约1.50×105m2[19]。跑马山滑坡的失稳模式属于滑移—拉裂式,对于这种失稳模式的边坡,一般选择其后缘主拉裂缝附近的位移监测点的监测数据进行预报,本文选取监测点7的监测数据进行预测预报研究(图1)。
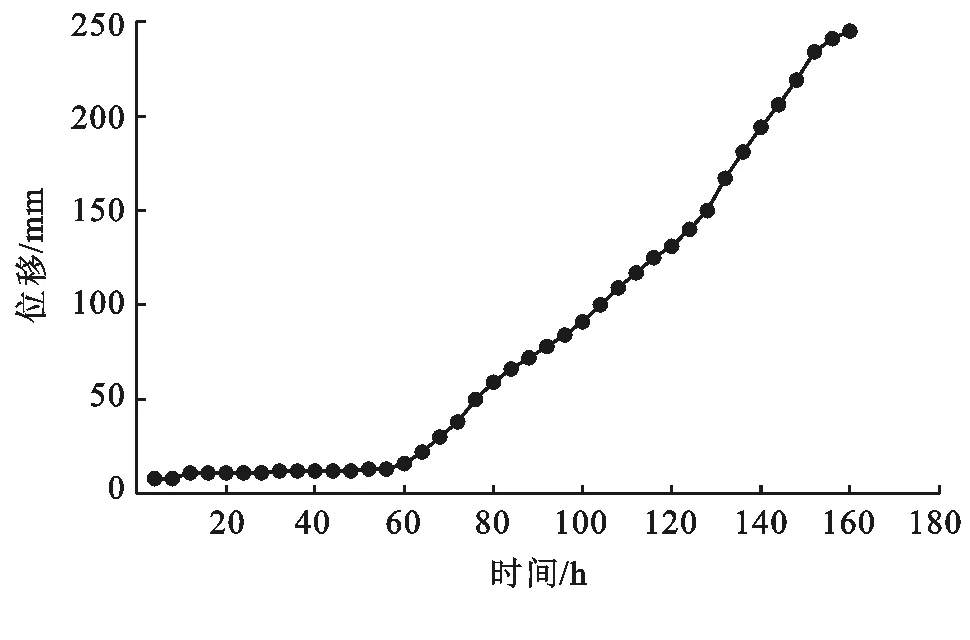
图1 镇江市跑马山滑坡体7号监测点的位移特征
从2016年6月29日0时到2016年7月5日16时,每隔4 h监测1次7号监测点的位移,共获得了位移演化过程数据40个。如图1所示为镇江跑马山滑坡体7号监测点的位移数据,从曲线趋势可以看出,山体位移在逐渐增加,如果能够提前1步或者多步预测出位移的变化,则可以有效对滑坡进行预报。分别采用UPF方法和本文方法对相同的原始数据进行位移预测,预测结果如图2所示。
为量化其性能对比结果,通过选择预测评价指标中的3个指标,来测试算法性能,计算结果详见表1。通过表1的结果分析可知,本方法能有效提示UPF算法的鲁棒性,并降低预测误差。
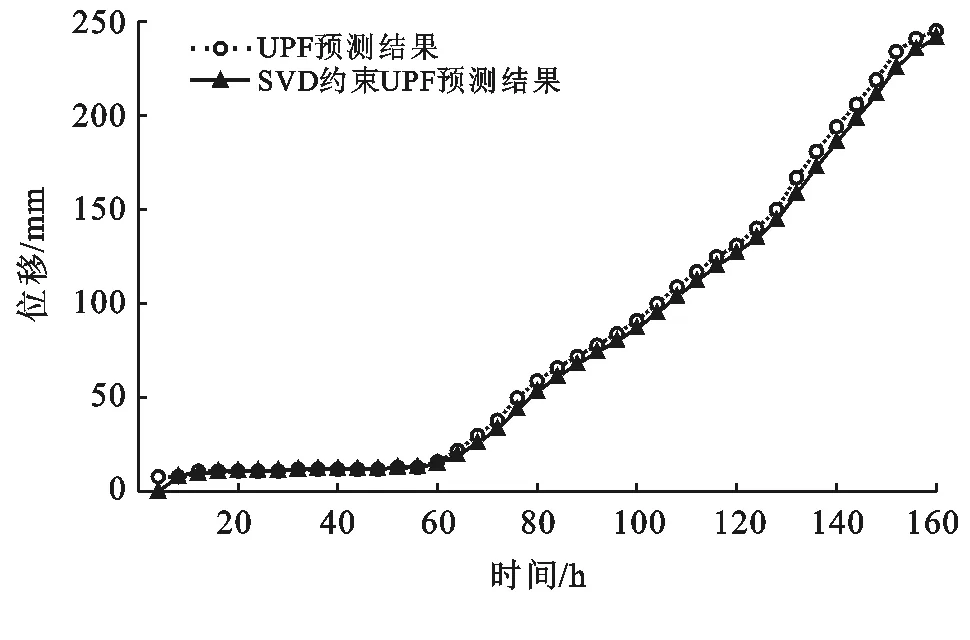
图2 UPF方法和SVD约束UPF算法预测结果对比表1 SVD约束UPF与UPF方法在滑坡位移预测的性能比较
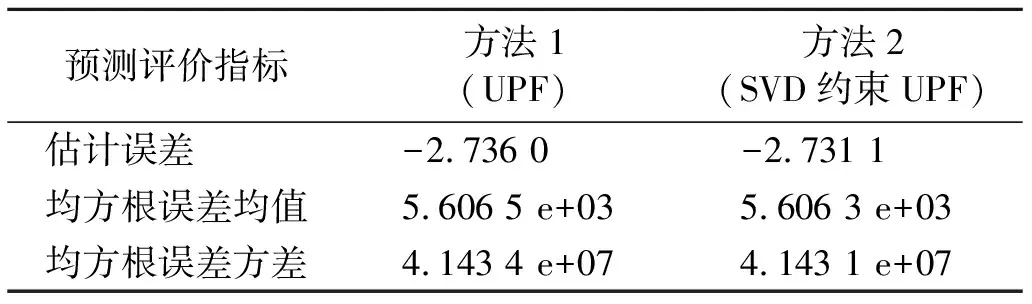
预测评价指标方法1(UPF)方法2(SVD约束UPF)估计误差 -2.736 0-2.731 1均方根误差均值5.606 5 e+035.606 3 e+03均方根误差方差4.143 4 e+074.143 1 e+07
2.2 京港澳高速公路雨花互通南侧护坡体滑坡监测工程的滑坡位移预测仿真
京港澳高速公路雨花互通南侧护坡体滑坡监测工程共布设4组位移传感器[16]。测试数据选取在2012年1月5日至2012年12月20日间3个位移传感器数据,即SHZ1-02—SHZ1-04(如表2所示)。
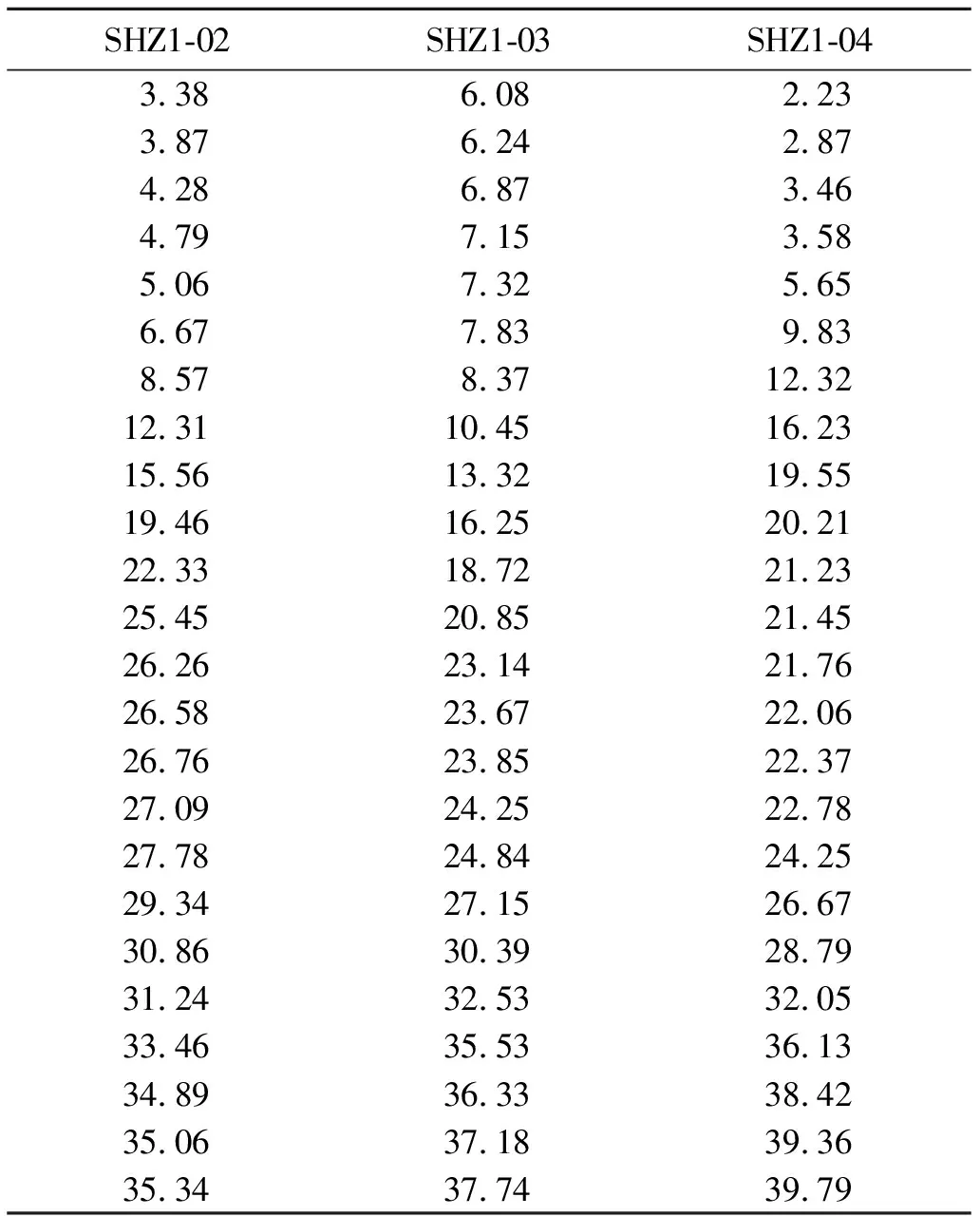
表2 京港澳高速某滑坡体路段位移监测原始数据[16]
利用本文方法进行滑坡位移的预测,预测结果如图3所示。通过图3可以看出,本方法能够有效预测滑坡位移变化趋势,并通过与UPF算法性能进行比较,发现本文方法具有更强的鲁棒性。为比较预测结果的量化性能,利用公式(16)—(19)对上述3组预测结果进行仿真对比,两种算法仿真误差比较结果如表3所示。

注:IUPF为在SVD约束下的UPF算法。图3 SHZ1-02-SHZ1-04位移预测结果对比表3 SVD约束UPF与UPF方法在滑坡位移预测的性能比较
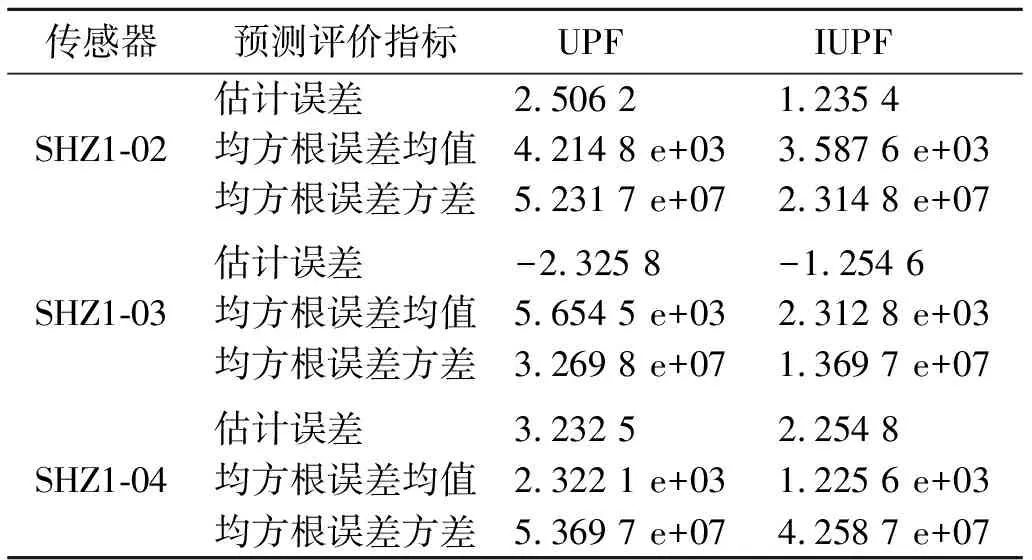
传感器预测评价指标UPF IUPF 估计误差 2.506 21.235 4SHZ1-02均方根误差均值4.214 8 e+033.587 6 e+03均方根误差方差5.231 7 e+072.314 8 e+07估计误差 -2.325 8-1.254 6SHZ1-03均方根误差均值5.654 5 e+032.312 8 e+03均方根误差方差3.269 8 e+071.369 7 e+07估计误差 3.232 52.254 8SHZ1-04均方根误差均值2.322 1 e+031.225 6 e+03均方根误差方差5.369 7 e+074.258 7 e+07
注:针对京港澳高速某滑坡体路段位移监测数据。
从表3可以看出,SVD约束型UPF算法(IUPF)在预报滑坡位移时比一般的UPF算法误差更小,鲁棒性更强,对于进一步预报模型的建立起到非常重要的辅助作用。
3 讨论与结论
(1) 对镇江市跑马镇滑坡监测工程中获得的7号监测点的40个位移数据,应用UPF算法和IUPF算法进行1步预测,采用绝对误差、均方根误差平均值和均方根误差方差3个指标衡量2种算法的鲁棒性,从指标比较可以得到IUPF算法优于UPF算法,提升了UPF算法应用于滑坡预报时的准确率。
(2) 为验证算法的适用性,将该算法应用于京港澳高速公路雨花互通南侧护坡体滑坡监测工程的位移预测,对3个传感器采集到的不同位置的位移进行1步预测,同样采用绝对误差、均方根误差平均值和均方根误差方差3个指标衡量2种算法的鲁棒性,从指标比较可以得到IUPF算法优于UPF算法,说明IUPF算法不但可以提升UPF算法的鲁棒性,对于不同数据也具有适用性。
(3) 本文首次将无迹粒子滤波算法应用于滑坡灾害的预报中,为准确的滑坡预测奠定了一定的理论基础,在位移能够准备预报的基础上,可以开展关于滑坡发生时间准确预报的相关研究。