海上履带式行走施工平台试验机关键技术
2019-03-26吴立柱华晓涛吴中正孟奎
吴立柱,华晓涛,吴中正*,孟奎
(1.中交二航局第三工程有限公司,江苏 镇江 212002;2.中交第二航务工程局有限公司,湖北 武汉 430040)
0 引言
随着“一带一路”战略的实施,我国基础建设工程重心逐步由国内转移至国外,作业环境从内陆走向外海。码头、人工岛等沿海基础建设工程多位于开阔海域[1-2],施工跨越季风期,面临着中长周期波、涌浪的影响。常规的施工方式有两种[3],一种是采用驳船,但无法在季风期正常作业,非季风期的作业窗口亦有限;另一种是采用自升式平台,但存在着施工成本高,平台移位定位同样受中长周期波、涌浪的影响,移位窗口较少等缺点。
海上履带式行走施工平台是水陆两栖作业平台,在10 m水深范围内可自由行走移动,采用坐底式履带行走结构,施工移位不再需要定位锚的辅助,移位作业效率提高。利用长支柱支撑平台水上结构,水线面面积小,平台上部平稳,将不再受到长周期波、涌浪的影响,作业窗口期增加。水下履带式行走施工平台作为施工设备的搭载平台,将有效解决沿海施工所面临的运动响应大、作业窗口期少的问题,成为沿海基础工程施工的核心设备。
国内尚无成熟的特大型水下履带式施工装备的研发及应用案例[4-6],为验证海上履带行走式施工平台的可行性,按照1∶6缩尺比研制平台试验机,解决平台系统可靠性、地形适应性、水下履带同步性等技术难题。
1 总体性能
平台试验机结构主要包括上部甲板、立柱及履带底盘。平台甲板与立柱通过螺栓连接,立柱间由斜撑与横梁支撑,立柱与履带式底盘铰接。平台通过4个履带底盘保证越障能力和稳定性;通过支腿内部液压油缸的主动调节,保证上部甲板水平,抑制震动。平台试验机外形如图1所示,主尺度见表1。
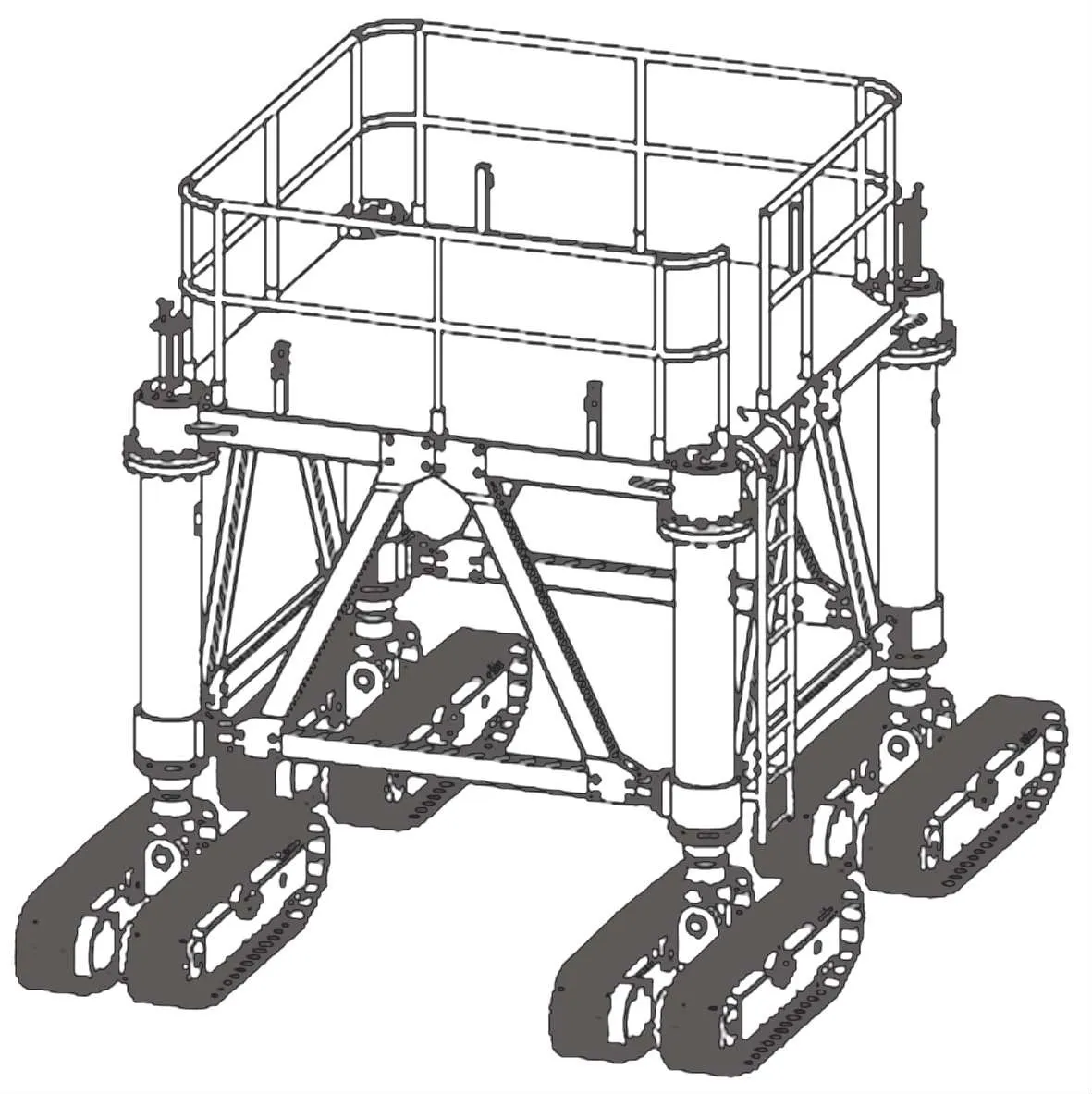
图1 平台试验机外形Fig.1 The appearance of the platform testing machine

表1 平台试验机主尺度Table 1 Main scale of platform testing machine m
平台甲板上安装泵机、配电箱、控制柜、液压油箱、蓄能器等关键设备,连接电路、油路、液压阀块和传感器等控制元件。立柱内油缸由油管连接油箱、调平泵机、蓄能器和液压阀块,通过液压阀和传感器的控制,形成液压调平系统。履带底盘由油管连接油箱、行走泵机和液压阀块,通过液压阀控制,形成液压行走系统。平台外接供电电缆,内部液压行走系统和调平系统相互独立,通过液压油箱供油,设置液压油循环回路,形成闭式液压系统。
平台甲板装有水平传感器,左前支腿装有高程传感器,测量油缸行程。通过高程传感器与水平传感器相互配合,液压阀块控制油缸动作,使平台在行走越障过程中,上部结构始终保持水平。
平台底部设有4套液压底盘,配备8条履带。每条履带可以同步行走,也可差速行走。控制台置于平台顶部,配有信号接收和发射器,可以配合遥控器进行远程操作。
2 设备选型
平台总体方案确定后,需要对平台驱动力和油缸流量进行计算[7-9],确定减速机、驱动马达、行走液压泵和调平液压泵等关键设备的规格型号。
2.1 行走机构
平台在行走过程中,驱动力与行驶阻力保持平衡,平衡公式如式(1)。

式中:Ft为平台驱动力;Ff为履带滚动阻力;Fw为水下行走海水阻力;Fi为坡度阻力;Fj为加速度阻力。
Ff=Gfcos α,Fi=G sin α
式中:G为1/4平台总重;f为滚动阻力系数;α为爬坡度。
考虑到实际行走过程中,平台行驶速度较慢,并且不会频繁加减速,因此忽略海水阻力和加速阻力。在极限工况下,α取设计极限爬坡角30°,此时平台驱动力Ft最大。
驱动负载转矩计算公式如式(2)。

式中:Mk为驱动负载转矩;Fks为有效牵引力;rd为驱动轮半径;η为履带系统效率。
Fks=0.6Ft,η=0.94
最终计算可知,Mk=3 267.7 N·m,选取对应减速机型号规格。
液压驱动马达负载转矩计算公式如式(3)。

最终计算可知,Tl=62.2 N·m,选取对应液压驱动马达型号规格。
马达工作压力计算公式如式(4)。

式中:ηm为马达效率;qm为工况排量;Pr为补油压力。
最终计算可知,Pm=13.5 MPa,根据马达排量选取泵型号规格。
2.2 调平系统
平台立柱调平动作均由内部油缸控制,需要计算油缸总流量来选择合适的调平液压泵。油缸总流量可直接列表计算,如表2所示。
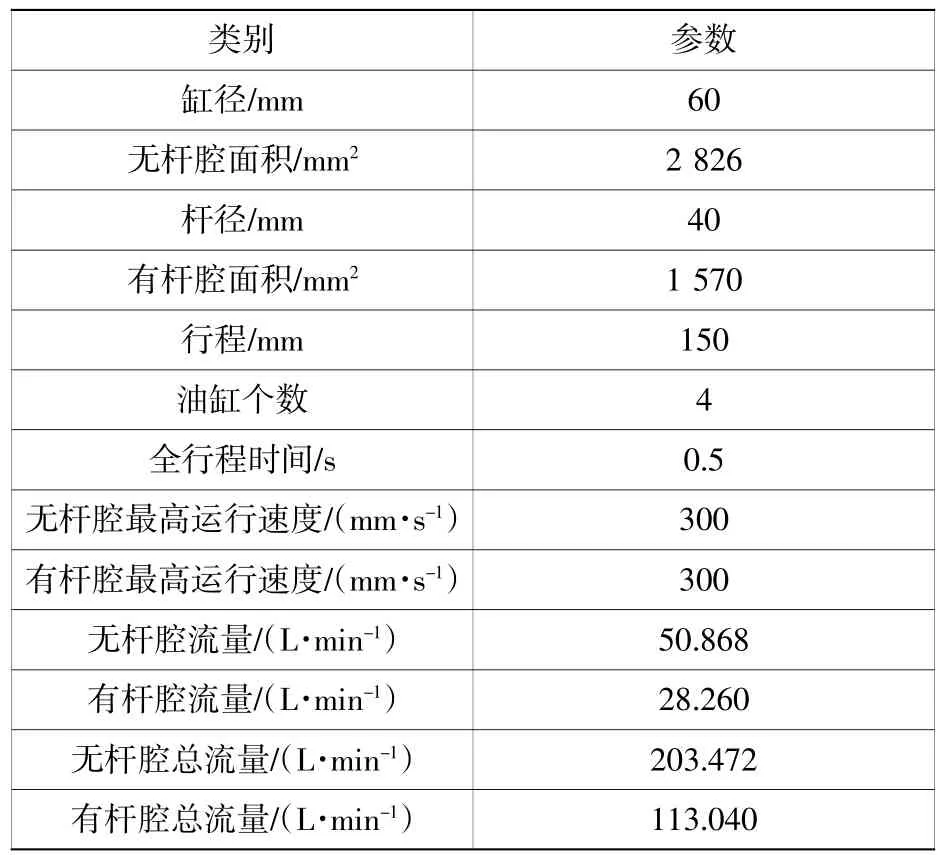
表2 调平液压泵流量计算表Table 2 Calculation of flow in adjustment hydraulic pump
3 控制系统
平台在行走过程中,可以适应不同的地形,通过主动控制系统使上部结构保持水平。平台控制系统主要包括姿态调整和行走控制。
先秦“气”论演变及对《黄帝内经》的影响……………………………………………………………………腊永红,张丽娟(2.40)
平台在行走过程中,通过控制立柱内部油缸,不断调节各立柱高度,补偿地形变化量,保证平台上部结构的水平状态。利用安装于平台几何中心的水平仪和平台高度检测传感器检测平台的姿态及高度,通过中央控制器控制支腿高度的控制阀对4个支腿分别依据平台的姿态和高度进行调整,以实现平台行走时适应海底工况的自动调平控制,如图2所示。
行走控制系统采用闭式控制系统,由比例变量泵直接控制驱动马达。通过测量驱动马达的转速实现转向控制、同步控制、防打滑控制等功能。
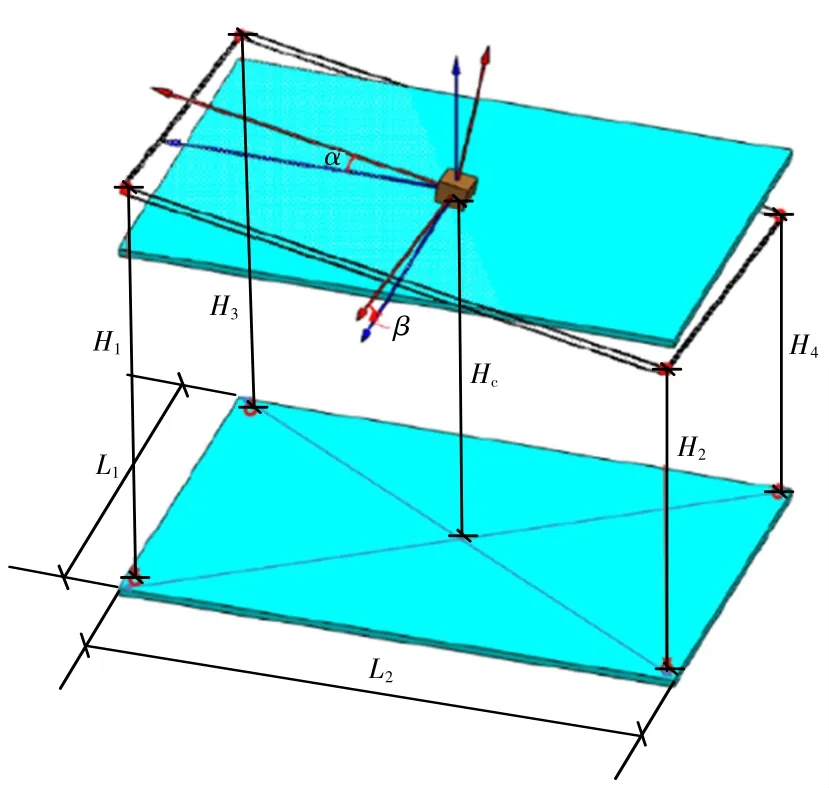
图2 平台姿态控制原理Fig.2 Platform attitude control principle
4 样机试验
平台样机结构拼装在室内进行,由于样机重量较轻,为提高安装精度,采用倒吊法拼装。平台设备安装完成后,进行整机系统调试。液压系统是平台最复杂的部分,调试难度最大。
平台样机研制完成后,进行试验场地整理、临时用电防护等工作,为平台试验做准备。平台样机试验在水下行走专用场地进行(图3)。

图3 平台试验Fig.3 Platform test
4.1 直线行走
在试验场地内的水泥地面上让平台以最大速度自由行走,不控制方向,记录各项数据如表3所示。
履带式平台前进与后退的最大速度一样,在0.22 m/s左右,但是前进和后退的偏转角度和偏转距离有较大差异。平台偏转均为顺时针方向,但是反向行驶时平台偏转角度非常大,在5°左右。平台在装配时,履带存在一定偏差,整体呈外八字形,因此试验中存在较大偏转。
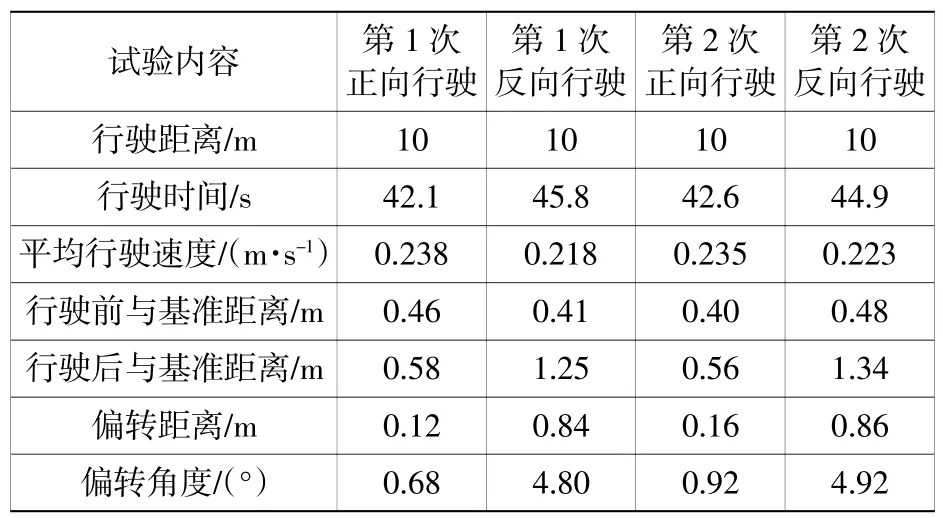
表3 平台直线行驶速度及偏转角度Table 3 Straight travel speed and deflection angle of platform
4.2 平台越障
履带式自行走平台样机4个立柱内部各有1个行程30 cm的油缸。履带式平台理论上保持平衡可通过的最大高度为30 cm,不保持平衡可通过最大障碍高度需要通过试验验证。
平台分别通过15 cm、20 cm、30 cm高度障碍,可以看到立柱在通过障碍时有明显收缩动作,平台上部结构保持水平。平台通过最大30 cm高度障碍可以实现自平衡。
平台可通过的最大坑深为60 cm,平台上部结构有明显歪斜,上部结构不能保持平衡。
4.3 平台转向
分别在水泥地面、橡胶板面、碎石路面和泥面等4个接触面上验证履带式平台的转向性能,转向效率见表4。

表4 4种接触面转向效率Table 4 Four contact surface turning efficiency
履带式平台在水泥路面上转向效率非常低,在履带差速转向一定角度后,履带会发生持续打滑,平台试验机重量较轻,接触面所提供的摩擦力不足以让平台完成转向动作。平台在泥面中转向效果最好。
4.4 平台上下坡
履带式平台样机具有较强的上下坡能力,具有4个履带底盘,8条履带独立驱动。履带在上下10°坡地形时,其行驶速度与平地基本无差异。
履带式平台在上下坡过程中,如果坡度过大,平台上部会倾斜一定角度,调节支腿油缸只能减缓这种倾斜角度,并不能完全消除。
在支腿未升起和升起两种状态下均进行了爬坡试验,在爬坡过程中,支腿油缸有一定的调节作用,不能使平台完全保持水平,这与平台上部使用的水平传感器、控制程序和地形坡度有关。
4.5 水下行驶
按照规范对履带的对地压力和试验场地中泥面的承载能力进行估算,试验地基承载能力仅为平台试验机对地压力的一半,在行走过程中,履带底盘必然会陷入试验泥面中,有可能会导致平台无法通过试验场地的泥面。
为验证履带式平台的地形适应性,使履带式平台正常行驶通过淤泥泥面。试验结果良好,虽然履带式底盘有一半陷入泥面,但是整个平台能够顺利快速地通过试验泥面。
履带正常行驶通过注水后的淤泥泥面,行驶过程快速平稳,履带式平台同样能够较好地适应水下行驶的环境。
4.6 试验结论
1)试验结束后,对履带式平台进行整体检查。履带底盘整体情况良好,无机油渗漏,履带承重轴无变形、无异响。平台结构完好,无变形。平台液压系统正常,无渗漏。履带式平台的系统可靠性良好。
2)平台试验机行走速度为0.22 m/s,达到了设计速度。履带式底盘能提供足够的驱动力,平台功率满足设计要求。平台保持平衡最大越障高度30 cm,可通过最大坑深60 cm,可顺利通过淤泥地形,快速上下坡,地形适应能力良好。
3)平台8条履带可同步行走,也可差速转向。平台履带呈外八字形,直线行走存在5°左右偏转。可通过提高平台结构安装精度来增强履带同步性。
5 结语
海上履带式行走施工平台试验机通过两套独立的液压系统驱动,实现水下履带行走、主动调平和抑制震动等功能,具有差速行驶和远程控制等特点,能很好地适应水下特殊地形。该试验机的研制,成功解决了平台系统可靠性、地形适应性、水下履带同步性等技术难题,为履带式平台实体机的研制奠定了夯实的基础。海上履带式行走施工平台是我国自主研发的新型沿海施工通用平台,为解决海外中长周期波海域面临的施工难题提供了新的方法,对海上通用施工装备研发具有重要的参考和借鉴意义。
