面向任务的航空数据链动态组网策略*
2019-03-14张步硕陈柯帆梁晓龙曹芳波
张步硕,吕 娜,陈柯帆,梁晓龙,刘 创,曹芳波
(1.空军工程大学信息与导航学院,西安 710077;2.空军工程大学空管领航学院,西安 710051)
0 引言
随着数字化战场的不断深化,作战场景、作战态势、作战对象等战场环境更加复杂多变,大规模航空飞行器群通过航空数据链组成航空自组织网络协同执行任务将会成为未来航空作战的主要作战形态[1-2]。
大规模航空飞行器群协同执行多样化任务,必须依赖对航空作战平台高效的指挥控制。传统的指挥控制方式难以满足较大规模作战平台协同需求。随着人工智能技术的不断发展,智能体技术逐渐运用到了指挥控制系统中[3-4],并随着信息传输技术的发展,逐渐呈现出群体化网络化的特点[5-6]。智能化的航空作战平台实现群体智能需要航空数据链网络提供通信支撑。航空作战平台的智能化改变了传统的信息处理与传递机制,信息交互更加面向具体任务需求,目前基于智能化航空作战平台的研究主要集中在任务规划与分配等应用控制层面[7-8],缺乏对智能化航空数据链网络的详细描述。同时,现有航空数据链网络研究基于传统OSI分层模型,以提升传输性能为研究目标[9],关注于更为健壮的网络路由,具有更高信道利用率和更加公平的媒体接入控制方式等,网络设计主要考虑信道利用率、信息传输时延、网络吞吐量等通信指标,缺乏通信网络层面与任务应用需求层面的深度耦合,因此,无法体现对任务需求的实际支撑能力。
为提升现有航空数据链作战效能,本文以任务需求为驱动,设计了面向任务的智能化航空数据链网络体系结构,研究了智能化航空数据链网络的信息处理与传递机制,并基于所设计体系结构提出了一种面向任务的动态组网策略。
1 网络体系结构设计
本文设计的面向任务的智能化航空数据链网络体系结构,考虑了航空作战平台实现群体智能的信息传输需求,采用了跨层融合的设计思路,描述了智能化航空数据链网络信息处理传递机制,下层网络行为由上层任务需求进行驱动。通过智能化航空作战平台间的信息交互与动态组网,实现网络构建与实际任务需求的深度耦合。
如图1所示,本文设计的面向任务的智能化航空数据链网络体系结构分为6个主要层次,分别是应用感知层、信息处理层、智能决策层、网络层、链路层和物理层。
1.1 体系结构总体描述
比较现有的航空数据链网络体系结构,本文设计的面向任务的智能化航空数据链网络体系结构,在信息处理层和网络层之间增加了智能决策层,同时在网络层、链路层和物理层分别增加了对应的智能控制模块,并对应用层(本文称作应用感知层)和信息处理层进行了任务与功能上的扩展。

图1 面向任务的智能化航空数据链网络体系结构
在满足传统任务与功能的基础上,应用感知层能够利用各类传感器系统对外部环境信息进行感知并生成与之对应的各类激励信息;信息处理层能够将应用感知层各类传感器系统产生的各类激励信息进行参数化和标准化处理,转化为可用于航空智能体自身与航空智能体间各类传感器交互协同的交感信息,同时将交感信息存储于战场环境信息库中,以实现航空智能体对战场环境的信息收集。智能决策层主要通过接收信息处理层和网络层输入的交感信息,完成对战场环境信息的收集存储,根据当前战场环境生成任务信息,使航空智能体内部各执行单元,根据当前任务需求产生相应的智能行为。3个智能控制模块的主要功能是根据当前任务需求控制数据链网络的网络链路构建,包括控制通信协议的选择、网络连接的建立、网络资源的分配以及数据的传输机制等,使得下层网络相关协议与参数能以任务需求为驱动进行调整。
1.2 信息处理与传递机制

图2 信息处理与传递机制
利用图2对所设计体系结构下航空智能体信息处理与传递机制进行了详细描述。其中,激励信息是指航空智能体通过自身传感器系统感知外部环境产生的信息;交感信息是对各类传感器系统产生的不同类型激励信息进行参数化和标准化处理后产生的,用于单个航空智能体内部和多个航空智能体之间,相同类型或不同类型传感器系统间的交互与协同;任务信息是由航空智能体利用交感信息与知识数据库进行匹配映射产生的表征具体任务类型、任务需求及任务相关关系的信息。
如图2所示,对任意航空智能体存在2路信息输入,一是利用各类传感器系统感知外部战场环境而产生的激励信息输入,二是利用数据链通信设备接收其他航空智能体借助于智能化航空数据链网络传输的交感信息而产生的交感信息输入。
对于输入的激励信息,首先经过参数化和标准化的信息处理,将不同类型传感器系统产生的激励信息转化为交感信息,并将交感信息存入知识数据库中的战场环境信息库,以实现对当前战场环境的信息感知。对于信息输出,一方面按需将交感信息通过数据链网络发送到其他航空智能体,以实现不同航空智能体间传感器系统的协同;另一方面,若战场环境信息库中的交感信息实现了与任务想定模型库中相关任务模型的匹配映射,则生成任务信息,并将任务信息输入智能行为规则库针对不同的执行单元确定相应的行为规则,使得相应的执行单元产生合适的智能行为(图中虚箭头表示控制驱动,实箭头表示信息流)。
对于输入的交感信息,一方面将通过航空数据链网络接收的交感信息输入战场环境信息库,各传感器系统通过访问战场环境信息库,提取用于传感器协同的交感信息;另一方面同激励信息输入一样,通过更新战场环境信息库促使相关执行单元产生智能行为。
2 面向任务的动态组网策略
现有的航空数据链组网方式一般以地理位置为参考,主要考虑网络拓扑约束,将处于相同区域内的作战平台组成一个子网[10-12]。虽然也有部分组网方式考虑了任务的需求,但也都基于事先规划,无法针对突发任务进行面向任务的灵活组网[13]。为使网络构建能支撑航空智能体利用群体智能面向具体任务,本文基于面向任务的智能化航空数据链网络体系结构,提出了一种面向任务的动态组网策略。
2.1 相关定义
依据FINC(兵力、信息、网络与指挥控制)模型[14],本文归纳出决定任务完成质量的3个要素:
1)布势时间。由航空智能体的任务协商时间与位置部署时间决定。是任务准备阶段的主要衡量指标;
2)协同系数。指任务执行者在实施任务的过程中相互之间交互能力资源的能力;
3)任务执行力。由参数P表示,PT表示对任务T的任务执行力。由平台能力资源与任务能力资源需求的匹配程度决定。航空智能体i所具备的能力资源可表示为ak(i),解释为某一航空智能体具备第k类能力,能力大小为ak(i)。由于航空智能体的类型分工明确,故考虑任意航空智能体仅具备单一能力。任务能力资源需求可由能力集向量进行表征,记为

其中,HT表示任务T需求的能力资源类型,dHT表示任务需求的第HT类能力资源大小。
2.2 面向任务的组网流程
本文所提组网策略是以面向任务的方式进行子网的动态构建,实现网络资源面向任务的有效动态复用[9]。现将组网流程描述如下:
1)通过传感器系统感知外部战场环境的航空智能体产生激励信息,并将激励信息通过参数化与标准化的信息处理转化为交感信息输入知识数据库;
2)接收到网络主节点广播的交感信息的航空智能体i,将交感信息输入知识数据库。航空智能体i将发送该交感信息的航空智能体作为网络主节点,若有多个航空智能体发送了相同交感信息,则选择平台号最小的航空智能体作为网路主节点,并执行步骤3);
3)航空智能体i判断自身是否正在执行任务,否则执行步骤4);是则判断新任务优先级是否高于当前正在执行任务,若不高则放弃进行新任务入网申请,继续执行当前任务,否则执行步骤4)。
4)航空智能体i利用知识数据库获取自身能力资源ak(i),若k∉AT,即自身不具备任务所需求的能力类型,则放弃入网;若k∈AT则执行步骤5)。
5)航空智能体i判断是否能在阈值时间内到达指定任务执行区域,到达任务执行区域时间可由交感信息,主节点位置信息与航空智能体i自身位置信息确定。假设任务执行区域为半径d的圆形区域,圆心坐标为(xT,yT),到达时间可由下式进行计算:

其中,(xi,yi)表示航空平台i当前坐标,v表示航空平台飞行速度。若 tarrive>tT,则放弃入网;若 tarrive<tT,则执行步骤6);
6)航空智能体i向网络主节点发送入网申请、自身能力资源情况ak(i)与到达任务执行区域的时间tarrive;
7)网络主节点确定当前任务属性,并且依据任务属性和表1确定优化顺序,在所得入网申请者组合中求出当所有能力类型为k的航空智能体到达任务执行区域时,到达时间最短的组合;
8)网络主节点将选择结果通过广播的方式发送到其他航空智能体;
9)发送入网申请的航空智能体接收到网络主节点的选择结果后,判断自身是否为网络成员,是则完成入网开始执行任务,否则放弃入网。
2.3 组网策略合理性分析
对于布势时间,计算到布势时间大于任务要求的航空智能体将不会进行入网申请,保证了参与执行任务的航空智能体都能在任务要求时间内完成作战布势。
对于协同系数,影响参数分别为任务执行者数量以及任务执行者相互之间的距离。nk表示参与任务执行的能力类型为k的航空智能体数量。提高协同系数可考虑减小nk以及nk个航空智能体间的平均传输距离,但由于航空智能体具有较高机动性,相互之间距离不能保证;同时只有当nk≥5减小nk个航空智能体间平均距离才可能达到与减少nk相同的性能,条件较为苛刻,证明如下:



可以推得nk≥5。
对于有效执行力指标,通过在满足任务需求的航空智能体中选择能力资源和最小的组合,可实现有效执行力的最大化。
3 仿真分析
利用EXata网络仿真软件对所设计的面向任务的智能化航空数据链网络体系结构下的组网策略进行仿真分析验证。
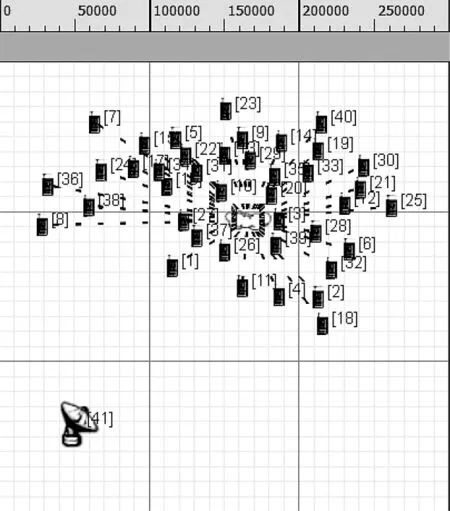
图3 网络仿真场景
假设在300 km×300 km的范围内存在一个由40个航空智能体组成的飞行器群,任意航空智能体采用TDMA的信道接入方式进行信息的交互,且最大飞行速度为1 MHz。各航空智能体具备的能力类型与能力资源大小如下页表1所示。
令41号节点持续广播消息,传输范围为150km。假设任意航空智能体若接收到41号节点发送的消息则将其视为战场环境改变,对应于一个任务属性为1,任务资源需求为表2的任务想定(仿真场景只考虑了存在一个任务的情况),任务规定作战区域为圆心坐标为(100 km,100 km),半径为80 km的圆形区域。
仿真结果如下:
任务主节点选择为1号节点,各能力类型的网络成员分别为:
能力类型 1:2、3、8;能力类型 2:9、10、11、12;能力类型 3:22、23、24;能力类型 4:27、28、31;能力类型 5:36、37。

表1 航空智能体能力类型与能力资源大小
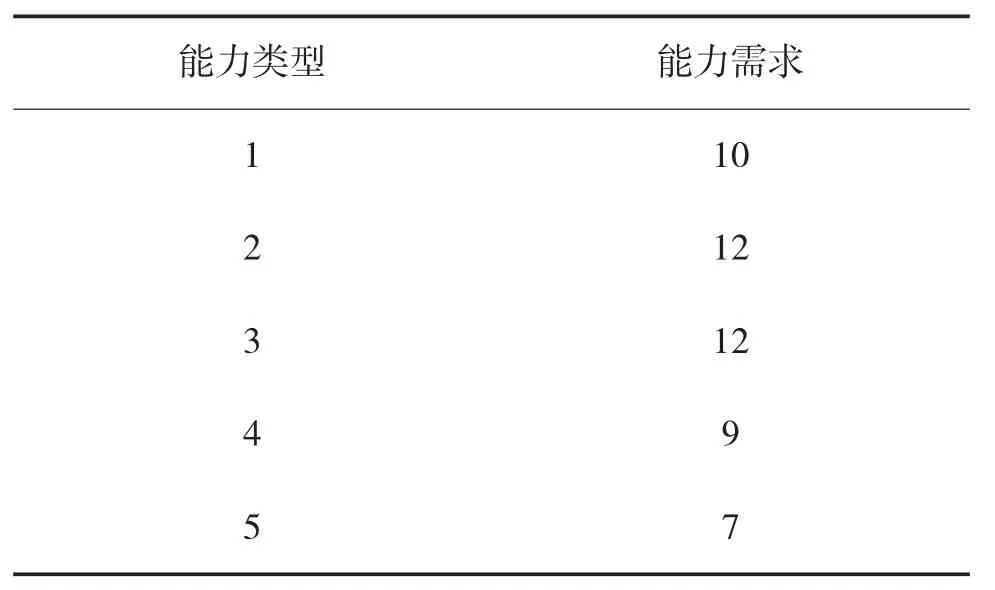
表2 任务需求
图4为网络成员提供的能力资源大小与任务能力资源需求的比较。可以看出,网络成员提供的各能力类型资源大于等于任务对各能力类型资源需求,保证了任务的可执行。
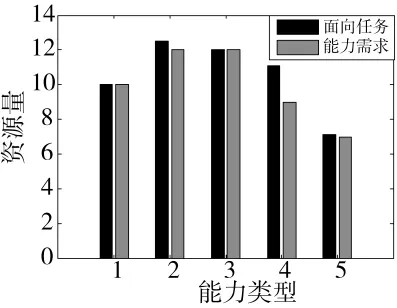
图4 网络能力大小与能力需求比较
将所得组网结果与满足任务能力资源需求的随机组网方式进行比较分析,结果如图5所示。

图5 协同系数比较
由图5可以看出,对于任务属性为1的任务想定,面向任务的组网策略使得任意相同能力类型航空智能体间的协同系数远高于随机组网的方式。
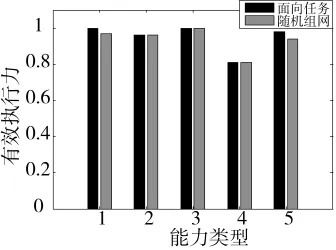
图6 有效执行力比较
图6为面向任务的组网方式与随机组网方式在相同协同系数的前提下,不同能力类型航空智能体有效执行力的比较。可以看出面向任务的组网方式使得能力类型为1和5的航空智能体的有效执行力高于随机组网方式,而能力类型2、3、4的有效执行力与随机组网方式相同的主要原因是对于任务属性为1的任务想定,优先考虑了协同系数指标,使得有效执行力指标弱化,但依然可以看出面向任务的组网方式,在有效执行力指标上优于随机组网方式,提升了航空智能体在执行任务过程中的有效执行力。
4 结论
本文基于现有航空数据链网络体系结构,结合未来战场需求,设计了面向任务的智能化航空数据链网络体系结构,分析总结了其信息类型与信息处理传递机制。同时,基于所设计网络体系结构,提出了一种面向任务的动态组网策略。通过组网实例分析,说明了在面向任务的智能化航空数据链网络体系结构下所提组网策略对实际任务需求的有效支撑能力。