永磁同步电机位置伺服系统改进自抗扰控制
2019-01-22邱建琪留若宸
邱建琪 留若宸

摘 要:为使分布式永磁同步电机伺服系统能够在长控制周期、长延时的应用场景中获得良好的位置伺服效果,提出了一种改进的自抗扰控制算法(ADRC)。针对经典ADRC参数众多、物理意义不明确的问题,结合电机控制模型进行分析,得到了一套工程上可行的参数整定方法。同时,基于电机控制系统的特点,对经典ADRC中的扩张观测器进行改进,提高了观测收敛的效率。仿真和实验结果表明,相比传统方法,本文提出的改进的自抗扰控制器具有更强的鲁棒性、更好的动态性能。
关键词:自抗扰控制;永磁同步电机;参数整定;改进扩张观测器;时滞系统
DOI:10.15938/j.emc.2019.11.006
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2019)11-0042-09
收稿日期: 2019-04-16
基金项目:国家自然科学基金(51837010)
作者简介:邱建琪(1974—),男,博士,副教授,研究方向为永磁电机及其控制;
留若宸(1995—),男,硕士研究生,研究方向为永磁电机控制。
通信作者:邱建琪
Improved active disturbance rejection control for permanent magnet synchronous motor position servo system
QIU Jianqi, LIU Ruochen
(College of Electrical Engineering, Zhejiang University, Hangzhou, 310027, China)
Abstract:
For the distributed permanent magnet synchronous motor servo system,inorder to get good position servo performance in the scene of long control period and long delay, an improved active disturbance rejection control (ADRC) was proposed. To solve the problem of classical ADRC which has too many parameters whose physical meaning is unclear, a set of feasible parameter setting method was presented based on the motor control model. At the same time, the extended state observer in the classical ADRC was used to improve the efficiency of observation convergence. Finally, simulation and experimental results show that the improved ADRC proposed has stronger robustness and better dynamic performance than the traditional method.
Keywords:active disturbance rejection control; permanent magnet synchronous motor; parameter setting; improved extended observer; time delay system
0 引 言
永磁同步電机(permanent magnet synchronous motor,PMSM)凭借其响应快、功率密度大、易于控制等优点, 广泛使用于各种电力驱动场合。虽然基于永磁同步电机的伺服系统已经发展多年,但是为了进一步增强系统的鲁棒性、快速性、精准度,近几年仍有一些先进的控制算法被提出。文献[1]在面向重复作业伺服系统的迭代学习过程中加入积分反馈与前馈控制实现了对当前扰动更快的应对,增强了系统的鲁棒性,实现了更精确的位置跟踪。文献[2]通过径向基(RBF)神经网络实现对永磁同步电机状态变量的跟踪,通过障碍李雅普诺夫函数(barrier lyapunov functions)对全状态进行了限幅,并证明了该算法的稳定性,但是仅在仿真系统中实现了良好位置伺服效果。文献[3]利用离散终端滑模控制律提高了永磁直线电机的位置跟踪性能。文献[4]利用有限集模型预测算法,在参数和工况未知或时变的情况下实现了永磁电机的高性能控制。
自1975年Honeywell开发出第一套商用的分布式控制系统以来,如今国内外已有几十家公司开发出了上百款产品,电机作为工业界核心机电能量转换机构逐渐被大量使用于分布式控制系统中[5]。随着近几年多轴机械臂、工业机器人、精密加工等研究的兴起,对电机分布式控制的位置精度[6]提出了更高的要求。然而由于通信系统的传输延时、带宽等限制,使得此类控制系统往往控制周期较长且数据存在延时,这使得一些常用的位置伺服控制算法性能大幅下降,同时为限制计算延时使得一些复杂的算法亦难以应用。
自抗扰控制(active disturbance rejection control,ADRC)通过实时估计系统的内扰和外扰对控制信号进行补偿,将系统整定为积分串联系统,从而实现高性能的控制[7]。由于不依赖物理模型的精确性,鲁棒性强,自提出以来在电机伺服控制领域已经广泛使用[8-13],同时也有大量研究证明自抗扰控制对于时滞系统能起到良好的控制效果[14]。
然而经典的自抗扰算法由于参数众多、物理意义不明确,在工程上使用难度较大。在过去的诸多研究中,对自抗扰控制的实用化研究还是有限的。为使ADRC能更好地应用于永磁电机分布式伺服系统中,本文首先对一类典型的分布式永磁同步电机位置伺服系统进行建模,结合自抗扰控制的算法原理,分析了自抗扰控制算法中各個参数在永磁同步电机位置伺服系统中对应的物理含义,之后根据物理含义给出工程上可行性较高的参数整定策略。此外,为降低扩张观测器的参数调节难度,提出了一种改进扩张观测器算法,并在理论上证明了该改进算法在相同参数下较原有算法具有更小的观测误差。最后,构建了一套分布式电机位置伺服系统,实验结果证明了该方法的有效性。
1 位置伺服系统模型
一种典型的分布式位置伺服系统的模型如图1所示。系统分为上位机运动控制器控制的位置外环、下位机控制的转速电流内环两部分,两环通过标准通信协议进行数据传递。对该系统建立一个通用的状态空间模型,推导如下。
永磁同步电机dq坐标系下电压、电流、转矩、转速、角度方程组如下
Ud=Lddiddt-pnωmLqiq+Rid,
Uq=Lqdiqdt+pnωm(Ldid+ψf)+Riq,
Te=32pn[ψfiq-(Ld-Lq)idiq],
Jdωmdt=Te-TL-Bωm,
dθdt=ωm。(1)
式中:Ud、Uq分别为d、q轴定子电压;id、iq分别为d、q轴定子电流;Ld、Lq分别为d、q轴电感;R为定子电阻;ψf为永磁体磁链;ωm为转子机械角速度;pn为电机极对数;Te为电磁转矩;TL为负载转矩;J为电机转子转动惯量;B为摩擦系数;θ为机械角度。
采用id=0的矢量控制时,转矩公式可以简化为Te=32pnψfiq。将id=0代入q相电压电流公式,之后利用PI控制器的表达式可以得到Uq的方程组,最终得到位置伺服系统的全阶表达式
dθdt=ωm,
dωmdt=-BJωm+32pnψfJiq-TLJ,
diqdt=-PnψfLqωm-RLqiq+1LqUq,
Uq=Kp2e2+Ki2∫e2,
e2=Kp1e1+Ki1∫e1-iq,
e1=ωref-ωm。(2)
式中:e1、Kp1、Ki1分别为转速PI环的误差输入、增益系数;e2、Kp2、Ki2分别为电流环PI环的误差输入、增益系数;ωref为转速给定值。
由于位置环的控制周期远大于电流环,两者解耦,认为位置控制时电流已达到稳态,即diqdt=0,利用这个条件可以消去原式中的iq项实现降阶。此外,Uq表达式简写为ωref与ωm的非线性函数U(ωref,ωm) ,得到二阶系统的表达式
dθdt=ωm,
dωmdt=32p2nψ2fJR-BJωm+
32pnψfJRU(ωref,ωm)-TLJ。(3)
2 改进自抗扰控制器设计
自抗扰控制如图2所示,主要分为3个模块:过渡过程、扩张观测器、非线性反馈。其中过渡过程是将给定参数利用跟踪微分器等方式提取出系统各阶状态变量的给定,防止给定突变时,给定与系统实际值误差过大,从而导致反馈出现严重超调的现象。扩张观测器将系统的建模误差、外扰动等综合为一个高阶状态变量,利用观测器实现各阶变量的观察,最终对利用高阶状态变量对扰动进行补偿。非线性反馈利用反馈律产生系统的最终输入,以实现期望的控制效果。自抗扰控制将整个系统整定成一个串行积分器系统,从而获得精确的控制效果[7]。
然而标准的ADRC参数众多,而且物理意义模糊,使得参数整定难度较大。本节基于前一节建模的分布式电机位置伺服系统,分析了ADRC参数的含义,对扩张观测器进行了改进,并设计了一种工程上可行的调参方法。
2.1 ADRC核心思想分析
对于式(3)系统,状态变量为转速为ωm以及角度θ,输出为转速给定ωref。因此令x1=θ,x2=ωm,u=ωref ,令U(ωref,ωm)中ωref项的线性部分为b0,并对该系统进行扩张,将已建模的参数误差、未建模的延时误差、外界的干扰看做一个扰动项,建立一个新的高阶状态变量
x3=32p2nψ2fJR-BJx2+
32pnψfJRU(u,x2)-b0u-TLJ(4)
因此式(3)简写为
x·1=x2,
x·2=x3+b0u,
x·3=f(u,x2,TL……) 。(5)
式(4)中f(u,x2,TL……)代表的是各类误差综合扰动项。该高阶扰动项解析表达式不易推导,很难得到可靠的精确解,但是只要得到x3这个非实际状态变量的近似观测值,即可完成扰动的补偿。自抗扰控制中的扩张观测器就是为了获得这个观测值。若得到的观测值足够接近x3,令u=u0-x3b0,则式(5)系统变为
x·1=x2,
x·2=u0。(6)
整个系统简化为一个串行积分器,那么只要合理选择u0就可以使x1=θ=u0得到期望的位置闭环效果。
2.2 过渡过程物理意义及参数整定
标准的二阶ADRC采用文献[15]提出的最速跟踪函数fhan对输入信号v进行跟踪,从而实现变量v1以变量v2的速度跟踪上信号v的效果。
v·1=v2,
v·2=fhan(v1-v,v2,r,h)。(7)
式中fhan有r与h 2个待调参数,计算过程为:
d=rh,
d0=hd,
y=x1+hx2,
a0=d2+8r|y|,
a=x2+(a0-d)2,|y|>d0
x2+yh,|y|≤d0,
fhan=-rsign(a),|a|>d
-rad,|a|≤d。(8)
根据fhan的最终输出fhan=-rsign(a),|a|>d
-rad,|a|≤d可以得到|fhan|≤|r|,因此r为fhan的上界。当h的取值为ADRC计算周期时,r的物理意义是v·2的上界,在位置伺服系统中为电机加速度的给定值的上界。
增大r可以减少过渡时间,但如果r太大使得电机无法跟上,则失去了过渡的意义,甚至当实际位置x1未到达给定v时,过渡过程的给定信号远快于实际状态量,使得二阶给定v2=0,从而导致转速提前降低,反而减缓了响应速度;如果r太小,过渡时间过长会影响系统的响应速度。为充分发挥过渡过程的性能,r值应略高于电机当前状态下能够达到的加速度上限。然而在仿真实验中发现,若在过渡过程中对fhan的参数进行整定会导致fhan中非线性区域偏移,从而引起过渡过程出现超调,降低过渡过程的品质,因此对r的调整应在过渡过程开始之前,即电机处于静止状态时。
可以通过求取或实测电机空载阶跃响应达到额定转速的平均加速度a来确定r的基准值,当电机负载较大时略微减小r,保证电机可以跟上;当电机位置给定突变较小时,可以增大r以提高系统的动态性能。
2.3 改进扩张观测器
ADRC是否能够实现精确控制的关键在于扩张观测器(ESO)是否可以精确跟踪状态变量。标准的二阶ESO形如
e1=z1-x1,
z·1=z2-β01e1,
z·2=z3-β02fal(e1,0.5,h)+b0u,
z·3=-β03fal(e1,0.25,h)。(9)
注意到式(3)中U(ωref,ωm)依据式(2)可以提取出ωref的线性部分3Pnψf2JRKp1Kp2ωref,因此可以令b0=3Pnψf2JRKp1Kp2。
对于本系统而言,x2是转速,具有实际物理意义,且前述过渡过程中的二阶给定v2也是根据转速给定的物理含义整定得到,因此这里的二阶观测值z2应严格跟随x2。为了获得二阶状态变量x2更优的观测效果,将x2与观测值z2的误差也输入到扩张观测器中。改进后的ESO如下
e1=z1-x1,e2=z2-x2,
z·1=z2-β01e1,
z·2=z3-β02e2+b0u,
z·3=-β03fal(e1,0.25,h)-β04fal(e2,0.5,h)。(10)
式中:e1、z1、x1分别为位置的误差、观测值、实际值;e2、z2、x2分别为速度的误差、观测值、实际值;z3分别为扰动的观测值;fal是非线性函数。
fal(ε,α,δ)=|ε|αsign(ε),|ε|>δ
εδ1-α,|ε|≤δ(11)
式中εδ1-α是為了防止ε趋近零时高频抖动引入的线性过渡。
标准二阶ESO系统的观测误差为:
e·1=e2-β01e1,
e·2=e3-β02fal(e1,0.5,h),
e·3=-β03fal(e1,0.25,h)-f(u,x2,TL……)。(12)
式中ei=zi-xi,(i=1,2,3),为ESO各阶观测误差。
常规情况下扰动f(u,x2,TL……)有界,设M≥|f(u,x2,TL……)|,u,x2,TL……
当系统进入稳态时,e·1=e·2=e·3=0有
0=e2-β01e1,
0=e3-β02fal(e1,0.5,h),
M≥|β03fal(e1,0.25,h)|。(13)
当fal(ε,α,δ)=|ε|αsign(ε)时,有M≥|β03|e1|0.25|,从而有
|e1|≤Mβ034,|e2|≤β01Mβ034,|e3|≤β02Mβ032(14)
因此,只要β03足够大,误差就能收敛到较小值,ESO可以实现对状态的观测[16]。
对于本文提出的改进ESO,当系统进入稳态时有
0=e2-β01e1,
0=e3-β02e2,
M≥|β03fal(e1,0.25,h)+β04fal(e2,0.5,h)|。(15)
当fal(ε,α,δ)=|ε|αsign(ε)时,有
M≥|β03|e1|0.25sign(e1)+
β04|e2|0.5sign(e2)|=
|β03|e1|0.25sign(e1)+
β04β0.501|e1|0.5sign(e1)|=
|β03|e1|0.25+β04β0.501|e1|0.5|≥
|β03|e1|0.25|(16)
因此为达到相同的误差精度,需要的β03比标准ESO更小。这意味着本文改进的ESO效率更高,参数调节更为容易。同理可证得对β02、β01亦是如此。此外,为调参方便可直接令β04=β03。经过多次实验、仿真对比可知,上述ESO的稳定裕度很大,只要电机的动态性能在数量级上接近就可以很好地实现跟踪,即仿真参数可以直接移植到实际系统中。
为验证改进ESO的观测性能,在下一节所述的仿真系统中进行对比实验。在由PI控制器构成的位置伺服系统进行阶跃响应实验,使用标准的ESO与改进ESO分别进行状态观测。ESO均采用相同的系数(β01=800,β02=5 000,β02=5 000)。
從图3中可以看到,改进ESO的误差明显小于标准ESO。虽然在位置观测误差上,标准ESO已经达到较小的误差了,但是在转速观测上,标准ESO观测到的转速并非转速。这是因为b0u 项仅为控制信号对系统的部分线性输入,由式(4)可知,u对系统的扰动项x3也存在影响,因而必然存在建模误差。在标准ESO中追求的是对位置观测误差的最小化,因此即使z2→x2不成立,也能通过x3进行补偿从而使得z1→x1。由于z2对x2观测的偏离,使得前述的过渡过程失去意义,且会导致输入到非线性反馈环节中的二阶误差较大,从而使得非线性反馈调参难度加大。改进ESO能使得z2→x2,输入信号建模误差、扰动集中于x3,从而实现更理想的控制效果。
2.4 非线性反馈
标准ADRC的非线性反馈是通过前述的fhan实现的
u0=fhan(v1-z1,c(v2-z2),r,h)(17)
根据前文分析r是fhan的输出上界,在本系统中对应着转速给定上界,为保证对内环充分激励,该值应略大于电机的额定转速。
c的作用调整转速误差与位置误差的权重,在改进ESO的作用下,二阶观测误差较小,因而二阶误差输入较为稳定,所以c往往是一个接近1的数,调节较为容易。根据调参经验发现,出现超调时增大c,接近给定速度减缓过快时减小c,即可获得不错的性能。
2.5 最终表达式
对于分布式电机位置伺服系统而言,由于通信延时、计算导致的延时大约在几百微秒的数量级,以600 r/min电机为例,延时产生的角度误差为1°~2°机械角度,为获得较优的精度需要进行一定的补偿,即x1=x1+x2Td,其中Td是利用控制周期间隙发送时间校准包获得的延时。需要注意的一点是,必须对x1与x2进行单位、幅值的换算,保证x·1与x2为相同数量级,也可进行标幺化,否则会影响ESO的收敛性。
v1=v1+hv2,
v2=v2+hfhan(v1-v,v2,r,h),
h*=h/k,
x1=x1+x2Td,
for(i=1:k){
e1=z1-x1,e2=z2-x2
z1=z1+h*(z2-β01e1)
z2=z2+h*(z3-β02e2+b0u)
z3=z3+h*β03(-fal(e1,0.25,h*)-fal(e2,0.5,h*))
},
u0=fhan(v1-z1,c(v2-z2),r0,h),
u=u0-z3b0。(18)
式中k为观测器迭代次数,扩张观测器可以通过多次迭代实现更精确的观测精度。
3 仿真实验
本节在Matlab2017B/SIMULINK中进行仿真,比较改进ADRC与传统控制方法在分布式位置伺服系统的位置控制性能。仿真使用的PMSM主要参数如下:直流母线电压30 V,定子电阻R=0.09 Ω,定子电感Ld=0.505 mH,Lq=0.565 mH,永磁体磁链0.012 8 Wb,极对数5,转动惯量J=2.2×10-5 kg·m2,摩擦系数B=0.000 3 N·m·s。内环采用标准的id=0转速电流双闭环矢量控制。电流环控制周期为80 us,转速环控制周期为400 us,位置环控制周期为2 ms,转速限幅700转,电流限幅2 A,通信延时采用300 us。
本节仿真所指的ADRC为上文所述的改进ADRC。由于基础的PI控制器难以调节出理想的控制效果,因此本节所指的PI控制器为带有积分分离的PI控制器。同时,两者都加入了相同的通信延时补偿。
3.1 扰动测试
首先在空载阶跃响应中对2种算法进行调参,得到了较为满意的控制效果。给定的位置信号为3 600°机械角度。
如图4(a)所示,在空载情况下,PI控制器的上升时间短于ADRC,这是由于启动初期过渡过程的加速度小于电机能够达到的加速度上限,因而限制了电机的动态性能。然而随着电机速度的上升,电机能达到的加速度上限必然降低,因此并不宜进一步调大过渡过程中的r参数。根据图4(b)可以发现,在接近给定位置角度时,PI控制的上升减缓,而ADRC控制下上升较快。不同于PI控制器小误差小输出,ADRC在小误差时也能有较大的输出,因而在误差较小时也能保持良好的动态性能,两者转速给定值的输出对比如图4(c)所示。最终两者进入稳态的时间基本相同,可以认为两者在该参数下性能接近。
在图4的参数下,进行抗负载扰动能力的测试。在电机中加入如图5(a)所示的随机变化的负载扰动。在本节所述的仿真系统中,电机在额定转速下负载能力极限约为0.25 N·m,因此这里的负载转矩已经达到了20%-80%的负载极限。
由于负载变化较大,两者的控制性能均明显下降,但由图5(c)可以发现ADRC在随机转矩扰动下无超调,进入稳态的时间保持在0.5 s不变,且静态误差非常小,然而PI的超调由空载时的无超调升至12.08%,出现了明显的超调,此外静态误差也大于ADRC,性能下降明显。说明本文所述ADRC控制器具有更好的鲁棒性,更适用于负载变动频繁工况下的位置伺服系统中。
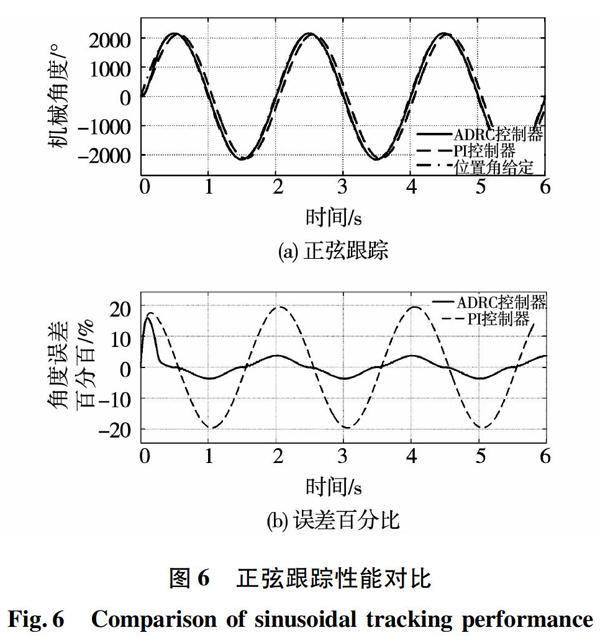
3.2 正弦跟踪测试
仿真取正弦波幅值为2 160°,周期2秒进行正弦跟踪测试,控制器参数与4.1节相同。
从图6(a)可以看出PI控制下出现了0.07s的滞后,且峰值降低了1.62%,而ADRC无滞后,峰值也无差。从图6(b)误差曲线可以看出,PI控制器下的最大误差达到了正弦幅值的19.5%,基本上可以认为难以跟随正弦曲线,而ADRC控制器的跟随误差除了启动初期较大,之后的最大误差为3.6%,可以较好跟随正弦曲线。说明本文所述ADRC控制器具有良好的动态性能与控制精度,更适用于高精度的位置伺服系统。
4 实验验证
在实际分布式伺服控制系统中进一步验证改进ADRC的性能。上位机为DSP28335执行改进ADRC算法,下位机为XILINX Spartan 3E XC3S500执行转速电流双闭环矢量控制,两者通过CAN实现通信。开关频率12.5 kHz,電流环控制周期为80 us,转速环控制周期为400 us,位置环控制周期为2 ms,限幅700转。使用DSP中的CPU时钟计数测得通信延时平均值为312 us,改进ADRC执行时间平均值为35 us。位置信息由绝对式编码器获得,分辨率360°/10 000,通过FPGA驱动DAC输出位置信息至示波器。
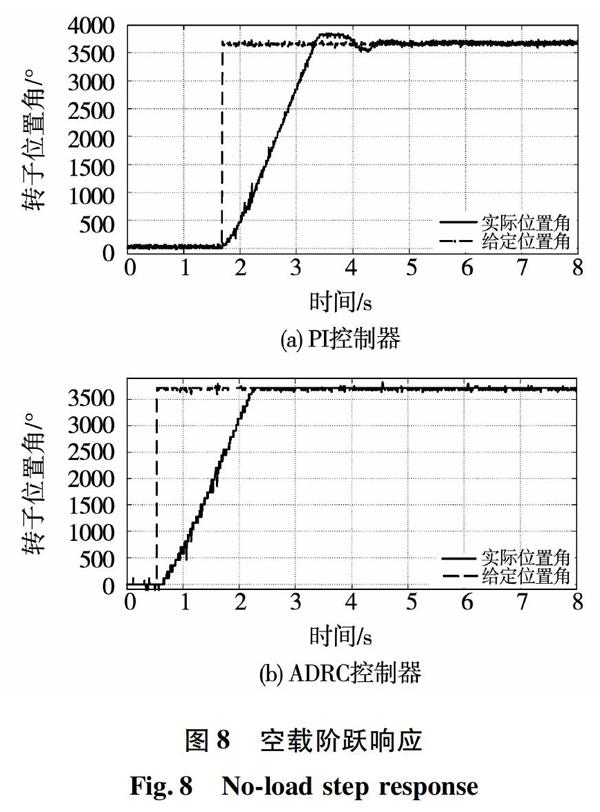
4.1 空载阶跃响应
位置给定为3 600°,电机空载启动。为保证较好的性能,PI控制器采用分段PI控制器。ADRC指的是本文所示的改进ADRC。
整定参数使得两者都在1.7 s左右达到给定值,但是PI控制器达到给定值之后出现了震荡,超调达到5.3%,在3 s才最终达到稳定状态。改进ADRC控制下无超调达到给定值。相比之下改进ADRC具有更好的控制性能。
4.2 正弦跟踪
为进一步比较动态性能,采用正弦跟踪实验。给定的正弦信号幅值1800°,分别在周期为12 s、6 s的情况下进行试验。
如图9所示,12 s周期的正弦给定下,PI可以实现正弦跟随,但是可以看到在正弦的波峰处出现了明显的跟随误差,这是由于波峰处速度较低时,且PI控制器输出较小,不足以充分激励内环,从而导致低速时位置精度降低。与此不同的是,改进ADRC依靠转速、位置的综合非线性反馈,在低速时也能有良好的位置调节性能,实现良好的正弦跟随效果。
如图10所示,当正弦给定的周期变为6 s时,PI控制下的实际位置已经产生了明显滞后,产生了较大的跟随误差。而改进ADRC仅仅出现了略微的超调,依旧保持良好的跟随性能。由此进一步验证改进ADRC算法能使系统具有更好的动态性能。
5 結 论
本文提出了一种基于改进扩张观测器的自抗扰控制算法,并针对传统自抗扰控制参数整定繁琐的问题给出了一个工程上可行的整定策略。结合永磁同步电机系统状态变量的特点,改进了扩张观测器提高了观测精度、使得自抗扰控制的参数整定更为容易。通过该改进自抗扰控制算法,实现了长延时、长控制周期的分布式永磁同步电机分布式位置伺服系统的高性能控制。仿真与实验均证明了该方法的有效性。
参 考 文 献:
[1] MANDRA S, GALKOWSKI K, ROGERS E, et al. Performanceenhanced robust iterative learning control with experimental application to PMSM position tracking [J]. IEEE Transactions on Control Systems Technology,2018,27(4):1813.
[2] LIU Y Y, YU J P, YU HS,et al. Barrier lyapunov functionsbased adaptive neural control for permanent magnet synchronous motors with fullstate constraints [J]. IEEE Access,2017,5:10382.
[3] DU H B, CHEN X P, WEN G H,et al.Discretetime fast terminal sliding mode control for permanent magnet linear motor [J]. IEEE Transactions on Industrial Electronics,2018,65(12):9916.
[4] 陈卓易, 邱建琪, 金孟加. 永磁同步电机有限集无参数模型预测控制[J].电机与控制学报,2019,23(1):19.
CHEN Zhuoyi, QIU Jianqi, JIN Mengjia. Finite control set nonparametric model predictive control for permanent magnet synchronous machines [J]. Electric Machines and Control,2019,23(1):19.
[5] 王常力.分布式控制系统(DCS)设计与应用实例[M].北京:电子工业出版社,2016:9-19.
[6] 胡松钰, 钱松, 吴伟, 等. 相邻交叉耦合直线开关磁阻电机位置同步控制[J].中国电机工程学报,2017,37(23):7024.
HU Songyu, QIAN Song, WU Wei,et al. Position synchronization control for linear switch reluctance motor based on adjacent crosscoupling [J]. Proceedings of the CSEE,2017,37(23):7024.
[7] HAN J Q.From PID to active disturbance rejection control [J]. IEEE Transactions on Industrial Electronics,2009,56(3):900.
[8] 周凯, 孙彦成, 王旭东, 等. 永磁同步电机的自抗扰控制调速策略[J].电机与控制学报,2018,22(2):57.
ZHOU Kai, SUN Yancheng, WANG Xudong, et al.Active disturbance rejection control of PMSM speed control system [J]. Electric Machines and Control,2018,22(2):57.
[9] 刘丙友, 竺长安, 郭兴众, 等. 基于改进型ADRC的永磁同步电机转子位置角控制方法[J].电机与控制学报,2017,21(12):24.
LIU Bingyou, ZHU Changan, GUO Xingzhong, et al. Control strategy for the rotor position angle of permanent magnet synchronous motor based on an improved ADRC [J]. Electric Machines and Control,2017,21(12):24.
[10] 左月飛, 张捷, 刘闯, 等. 基于自抗扰控制的永磁同步电机位置伺服系统一体化设计[J]. 电工技术学报,2016,31(11):51.
ZUO Yuefei, ZHANG Jie, LIU Chuang, et al. Integrated design for permanent magnet synchronous motor servo systems based on active disturbance rejection control [J]. Transactions of China Electrotechnical Society,2016,31(11):51.
[11] 孙凯, 许镇琳, 盖廓, 等. 基于自抗扰控制器的永磁同步电机位置伺服系统[J].中国电机工程学报,2007,27(15):43.
SUN Kai, XU Zhenlin, GAI Kuo, et al. A novel position controller of pmsm servo system based on activedisturbance rejection controller [J].Proceedings of the CSEE,2007,27(15):43.
[12] 贺虎成, 孙磊, 张玉峰, 等. 基于矢量控制的异步电机自抗扰控制[J].电机与控制学报,2019,23(4):120.
HE Hucheng, SUN Lei, ZHANG Yufeng, et al. Asynchronous motor active disturbance rejection control based on vector control [J]. Electric Machines and Control, 2019,23(4):120.
[13] 杜博超, 韩守亮, 张超, 等. 基于自抗扰控制器的内置式永磁同步电机无位置传感器控制[J].电工技术学报,2017,32(3):105.
DU Bochao, HAN Shouliang, ZHANG Chao, et al.Sensorless control of interior permanent magnet synchronous motor based on active disturbance rejection controller [J]. Transactions of China Electrotechnical Society,2017,32(3):105.
[14] 王丽君, 李擎, 童朝南, 等. 时滞系统的自抗扰控制综述[J]. 控制理论与应用,2013,30(12):1521.
WANG Lijun, LI Qing, TONG Chaonan, et al.Overview of active disturbance rejection control for systems with timedelay [J]. Control Theory & Applications,2013,30(12):1521.
[15] 韩京清, 袁露林. 跟踪-微分器的离散形式[J].系统科学与数学,1999,19(3):268.
HAN Jinqing, YUAN Lulin. The discrete form of trackingdifferentiator [J]. Journal of systems science and mathematical sciences,1999,19(3):268.
[16] 韩京清. 自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008:184–197.
(编辑:姜其锋)
