电喷柴油机试车台监控系统的设计与实现
2019-01-07刘林华陈玉冲
刘林华, 冯 宁, 陈玉冲, 苏 芝
(1. 上海船舶运输科学研究所 舰船自动化系统事业部, 上海 200135;2. 渤船造船厂集团设计院, 辽宁 葫芦岛 125004)
0 引 言
随着环境日益恶劣和能源供应日益紧张,国际社会对船舶节能和污染物排放控制的要求不断提高。国际海事组织(International Maritime Organization, IMO)已于2011年实施TierⅡ排放标准,并于2016年强制要求船用柴油机NOx排放符合Tier Ⅲ的要求。面对日益严苛的主机运营成本要求和排放法规,大型船舶低速柴油机电控智能化成为低速船用柴油机发展的必然趋势。
沪东重机股份有限公司联合上海船舶运输科学研究所(以下简称“上海船研所”)等多家科研机构自主研发出船用大功率低速电喷柴油机,其中上海船研所承研的电喷控制系统是柴油机的大脑和神经中枢,对柴油机的稳定、经济、可靠运行起到决定性作用。经过5 a的联合研制,先后完成电喷控制系统仿真试验、硬件在环试验(HIL)、单缸台架试验和第三方环境试验。为开展国产化电喷柴油机整机、液压驱动及燃油喷射系统和电控系统的运转、功能性能试验,设计开发一套能满足电喷柴油机整机试验需求的电喷柴油机试车台监控系统。
1 电喷柴油机主机监控系统
随着电喷柴油机和电控系统相关技术不断发展,电喷柴油机主机遥控系统的设计与实现提出的功能需求不断演变。下面以MAIN的电喷主机的接口和配套的主机遥控系统实现的功能为例进行分析。
配套MAN B&W ME系列电喷柴油机的主机监控系统见图1,其中:气缸控制单元实施对燃油喷射阀、排气阀、启动控制阀的控制及对曲轴转速和转角的测量;辅助控制单元实施对辅助鼓风机、机带共轨伺服油泵和电动共轨伺服油泵等辅助设备的控制;柴油机控制单元实施对气缸滑油电磁阀的控制,为气缸提供润滑。柴油机数据交换接口单元A与柴油机数据交换接口单元B互相冗余,是ME电喷柴油机电气控制系统对外进行数据交换的接口控制模块。

图1 配套MAN B&W 系列电喷柴油机的主机监控系统
主机遥控系统通过柴油机数据交换接口单元向ME电喷柴油机电气控制系统发启动、停车和调速等指令,控制主机启动、停车和变速。安全保护系统通过柴油机数据交换接口单元接收ME电喷柴油机电气控制系统和ME电喷柴油机重要的运行状态数据,在发生严重故障时执行安保动作(故障降速、故障停车和紧急停车),保证主机安全运行。
2 试车台监控对象
试车台监控对象为沪东重机股份有限公司研制的高压共轨小缸径低速柴油机和上海船研所研制的SRI-VC2110ECS电喷柴油机控制系统及相关辅助设备。试验现场环境为电喷柴油机控制系统控制主机,主机通过轴系联接水力测功仪进行负荷调节(见图2)。
SRI-VC2110ECS电喷柴油机控制系统中的气缸控制单元(CCU)为整套系统的核心部分,实现对各气缸启动阀、燃油增压阀、燃油喷射阀和排气阀等气缸设备的控制及对伺服油共轨压力和辅助鼓风机等辅助系统的控制。机旁控制单元(LCU)实现对机旁指令的逻辑处理;柴油机控制单元(DCU)通过CCU实现对柴油机的启动、停车和调速等控制功能及机旁控制时对柴油机的各种限制保护。
LCU和DCU均为电控系统与外部通信的接口模块,通信功能互为备份。远程遥控功能的控制指令、安全保护功能的数据监测和安保指令、电喷柴油机控制系统运行状态及实时参数监测均通过LCU和DCU与电喷柴油机试车台监控系统进行数据交互实现。
高压共轨小缸径低速柴油机的主要技术指标为:缸数6 缸;气缸冲程1 600 mm;额定转速157 r/min;可换向。
3 功能需求分析
电喷柴油机试车台监控系统需实现主机遥控功能、安全保护功能、监测报警功能和车钟管理功能。与传统的柴油机相比,电喷柴油机取消了凸轮轴驱动燃油阀开闭、排气阀开闭和启动空气分配等操作的机械结构,通过电控阀件对气缸启动阀、燃油增压阀、燃油喷射阀和排气阀等设备进行直接控制。监控系统主要通过电喷柴油机控制系统对主机进行控制,同时实时监测主机的运行状态。

图2 试车台监控系统组成
3.1 控制功能
1) 选择控制部位。该系统具有机旁和集控台2个控制部位,其中:机旁控制具高优先权,控制部位转换只能在机旁进行;集控台控制部位转换开关仅实现联络功能(操作部位不一致时输出报警)。
2) 启动联锁。当主机停机、主机控制模块采集到任一启动联锁故障信号时发生启动联锁,主机不允许启动并发出启动联锁报警,当且仅当故障排除或通过复位清除故障报警时才可启动主机。
3) 遥控启动。当主机处于备车完毕状态、控制部位在集控台时,将集控台车钟手柄从停车位置扳向正车(或倒车)任意位置,系统向电喷控制系统发出正车(或倒车)启动指令,由电喷控制系统控制主机正转(反转)启动。
4) 遥控停车。当主机运行、控制部位在集控台时,将集控台上的车钟手柄扳至停车位置,系统向电喷控制系统发出停车指令,由电喷控制系统控制主机停机。
5) 换向。当车钟手柄从非海上全速正车位置直接扳到倒车任意位置时,主机转速下降到制动转速,输出停车指令控制主机停机,待主机停机之后反向启动主机。
6) 应急换向。该操作是将车钟手柄从海上全速正车位置直接扳到倒车任意位置时的一种紧急操作。在应急换向情况下,主机转速下降到制动转速,输出空气刹车指令控制主机转速快速下降,待主机停机之后反向启动主机。
7) 主机调速。当主机运行时,根据主车钟令和速度调节曲线计算出给定转速,系统向电喷控制系统发出转速设定指令,由电喷控制系统控制主机调速。
8) 限制保护。该控制功能包括最低稳定转速限制、最大转速限制和临界转速限制。
9) 越控。当控制位置在集控台时,按下集控台上的“越控”按钮,取消遥控系统相关限制保护功能,同时向电喷控制系统发出越控指令。
3.2 安全保护功能
1) 故障降速。若主机安保模块在电喷柴油机运行过程中检测到故障降速故障信号,即刻发出故障降速声光报警;同时,若系统工作在非应急状态下,按设计要求即刻或延时输出故障降速,控制主机降速。
2) 故障停车。若安保控制模块在电喷柴油机运行过程中检测到故障停车故障信号,即刻发出故障停车声光报警;同时,按设计要求即刻或延时输出故障停车报警,控制主机停车。主机停机之后,需在排除故障、将车钟手柄扳到停车位置并清除报警之后重新启动主机。
3) 紧急停车。机旁控制面板和集控台上均设有“紧急停车”按钮,当电喷柴油机在运行过程中发生紧急情况时,可直接使柴油机停机。
3.3 监测报警功能
1) 数据采集与传输。通过数据采集模块采集主机及相关辅助设备的传感器信号(PT100、4~20 mA、开关量等),并通过双冗余CAN网将其发送至上位管理微机,进行集中显示和报警处理;此外,上位管理微机还通过双冗余CAN网接收电控系统LCU和DCU转发的电控系统测量参数及控制状态参数,对其进行集中显示和报警处理。
2) 参数显示与报警。上位管理微机按分系统和类型对所有测点进行分类,实时对所有参数进行列表显示,显示的内容包括测点名称、测点量程和报警上下限等;同时,对各测点进行故障判定和传感器故障检查。当发生测点越线报警或传感器故障时,在输出声光报警的同时对该故障进行突出显示。
3) 图形显示。对主机和电控系统内部的重要参数(如主机转速、各缸排气温度等)进行图形显示。
4) 数据记录和查询。能自动定时或手动对所有显示的数据进行保存和报警、消警记录保存;既可查询某一时刻所有测点的数据、控制状态信息及指令、安保状态信息,又可查询当天和某一时段的报警、消警记录。
5) 故障自诊断。实时判定所有通信模块的通信状态信息,并对其进行集中显示,突出显示故障模块。
6) 二次仪表显示。对一些重要的参数(主机转速、燃油压力等)进行二次仪表显示。
3.4 车钟管理功能
集控台上和机旁控制面板上均设有车钟显示板,用于使机旁试车工作人员及时掌握主机的运行状态(车令复示功能)和与集控台操作人员的通信(辅车钟通信功能)。
4 试车监控系统的实现
4.1 硬件设计
电喷柴油机试车台监控系统按通用化、系列化和组合化的要求设计,选用SRI-VC2100标准的控制器,主要由集控台、监测数据采集箱和车钟复示箱组成(见图3)。该系统主要配置的模块是遥控控制模块、安保控制模块和数据测量模块等(见表1)。

a) 集控台
b) 数据采集箱
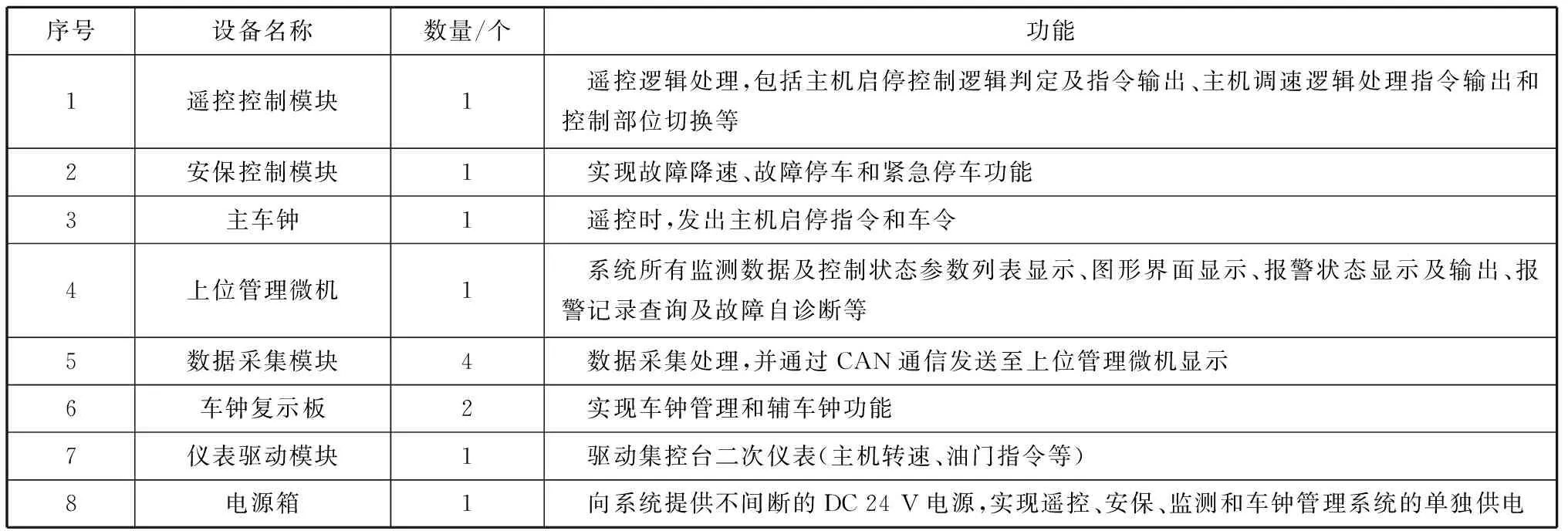
图3 集控台和数据采集箱
4.2 功能实现
4.2.1 遥控功能实现
遥控控制模块和安保控制模块均选用FCU01模块。FCU01模块是上海船研所根据民用船舶三大主力船型的实际需求,综合应用信息技术和自动化技术开发的新型船舶机舱现场控制模块,提供丰富的接口资源,通过与扩展I/O模块灵活组合,可满足主动力控制、电站控制和监测报警等大部分现场监控功能。
遥控控制原理图见图4,遥控控制模块在采集车钟电流、控制指令(正倒车启动、停车等)、安保输出和主机转速等信号之后,首先根据主机的运行状态进行内部控制逻辑处理,然后向电喷控制系统中的LCU和DCU发送指令,最后由DCU通过各缸的CCU驱动各电磁阀件完成对主机的控制。

图4 遥控控制原理图
4.2.2 安保功能实现
安保系统实现故障降速、故障停车和紧急停车功能。出于安全性考虑,系统中安保控制模块与其他模块的通信主要通过双冗余CAN网络实现,同时重要的安保输出(故障降速、故障停车)通过硬线连接作为备份。
1) 故障降速功能。主机运行过程中,当安保控制模块检测到故障降速故障时,即刻输出声光报警,同时通过CAN网络将故障降速信号发送至电控系统LCU、DCU和遥控控制模块。当控制部位在集控台时,由遥控控制模块向DCU发送指令,使主机转速降至设定值;当控制部位在机旁时,由DCU直接控制,使主机转速降至设定值。
2) 故障停车功能。主机运行过程中,当安保控制模块检测到故障停车故障时,即刻输出声光报警,同时通过CAN网络将故障停车信号发送至电控系统LCU、DCU和遥控控制模块;遥控控制模块执行停车逻辑,由DCU向各缸CCU发送指令,控制主机停机。与传统柴油机的安保系统不同,该安保系统需实时监测电控系统的运行状态,发现电控系统有严重故障时需立即执行故障停车功能。故障停车信号包括推力块温度高、主轴承滑油进口低压、曲柄油雾高浓度、增压器轴承滑油进口低压、气缸冷却水进口低压、辅助风机压力低、紧急停车-机旁、紧急停车-集控和电控系统严重故障。
3) 紧急停车功能。当发生紧急情况需立即停车时,按下“紧急停车”按钮,输出故障停车信号至遥控控制模块、LCU和DCU控制主机停机,同时直接控制燃油泄放阀动作,确保主机快速停止转动。
为提高系统的可靠性,选用开关量采集模块EDDI-W对重要的安保信号进行采集。EDDI-W具有断线检测功能,当检测信号发生断线故障时,输出断线报警,同时屏蔽该点的安保功能。EDDI-W与主控制器通过SPI总线连接,方便拓展。
4.2.3 转速测量
转速测量对保证主机遥控系统和安保系统可靠、稳定运行至关重要。测量转速波动可能导致遥控系统内部控制逻辑混乱、控制指令误动作,更严重时可能直接导致安保系统误判主机超速,触发紧急停车误动作。该系统的转速测量采用双冗余霍尔型转速传感器(欧姆龙E2E1-X5)设计。该型转速传感器采用免接触式磁电原理,接近开关式传感器,输出波形信号的一致性好,无抖动和回跳,具有体积小、重量轻、安装方便、易于维护、无磨损、使用寿命长、抗振动和抗冲击性强等优点;同时,双冗余霍尔型转速传感器设计可方便测量柴油机转动的方向。测速电路原理框图见图5。
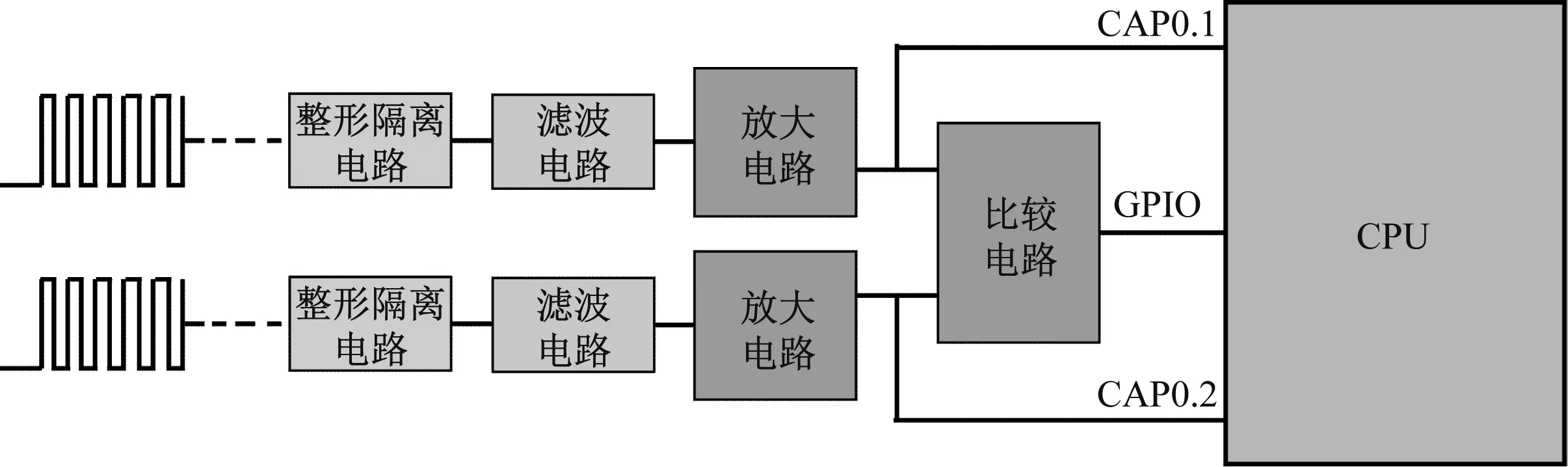
图5 测速电路原理框图
4.3 软件设计
软件设计编程环境为keil uvision4 + μC/OS-II。keil uvision4采用C语言编程,提供强大的集成开发调试工具,便于开发调试。移植并采用嵌入式操作系统μC/OS-II,主要好处是能屏蔽底层硬件的差别,给上层应用提供统一的接口,并管理进程调度和资源分配等;同时,可根据任务的重要程度(优先级)优先执行重要的任务,确保最重要的数据能得到及时处理,提高系统的实时性和可靠性。
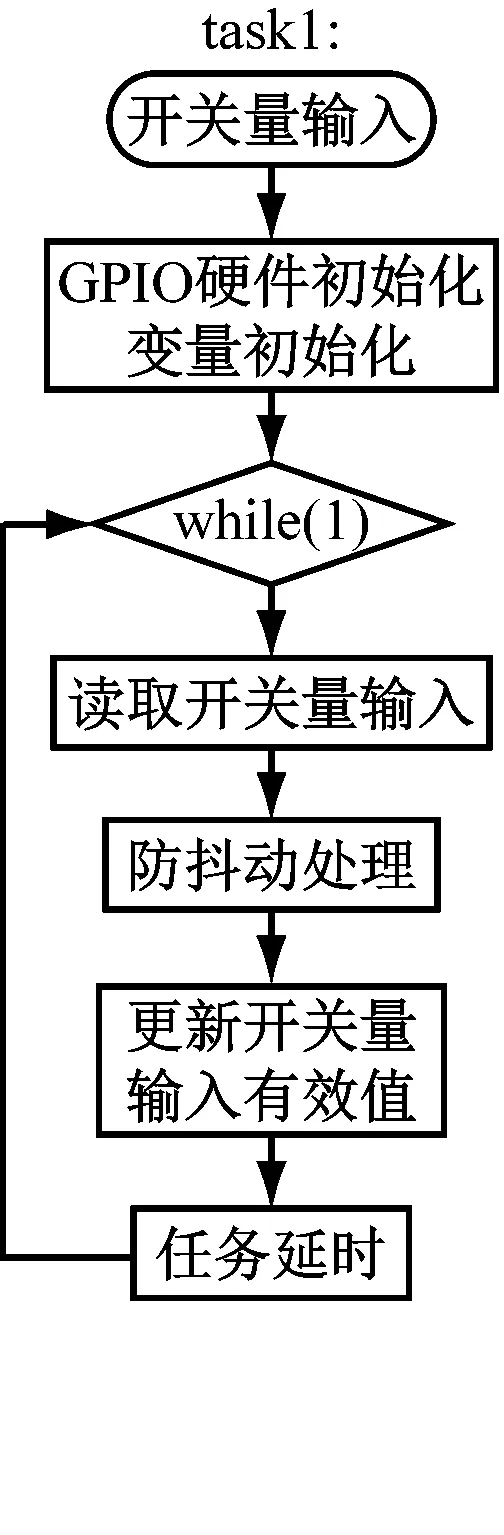
遥控控制模块程序任务流程见图6。任务调度通过嵌入式操作系统μC/OS-II核心调度器实现。系统时钟节拍设置为1 ms事件,核心调度器被事件触发之后遍历任务块链表,检索到处于就绪态优先级最高的任务执行。
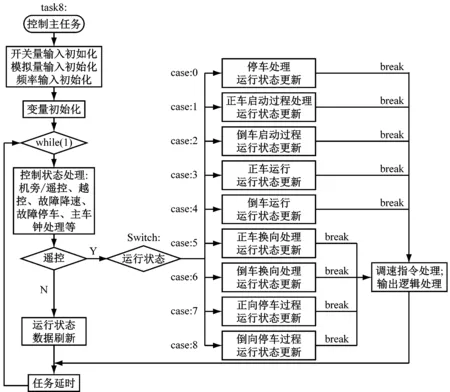
b) 控制主任务处理流程
遥控控制模块主要实现的控制功能包括主机启动、主机停车、主机调速和换向,主要功能流程见图7。主机正常换向时,程序控制主机降速至制动转速之后输出停车指令至电控系统DCU,待主机停机稳定之后输出启动指令至电控系统DCU反向启动主机。当主机应急换向时,与主机正常换向不同,主机转速降至制动转速以下,同时输出停车指令和空气刹车指令,快速制动主机。
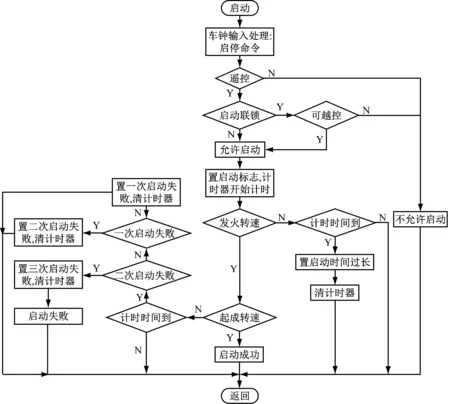
a) 启动功能流程
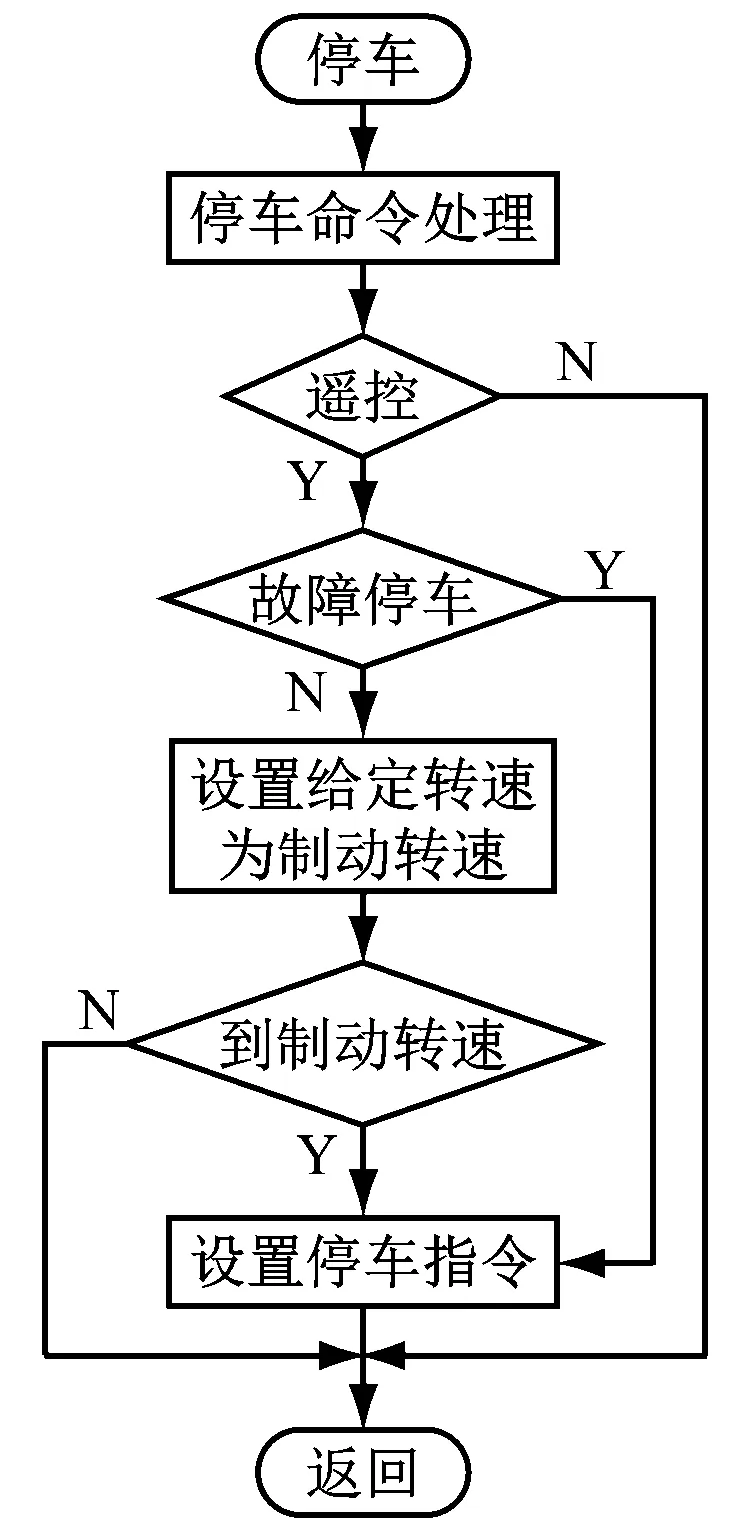
b) 停车功能流程
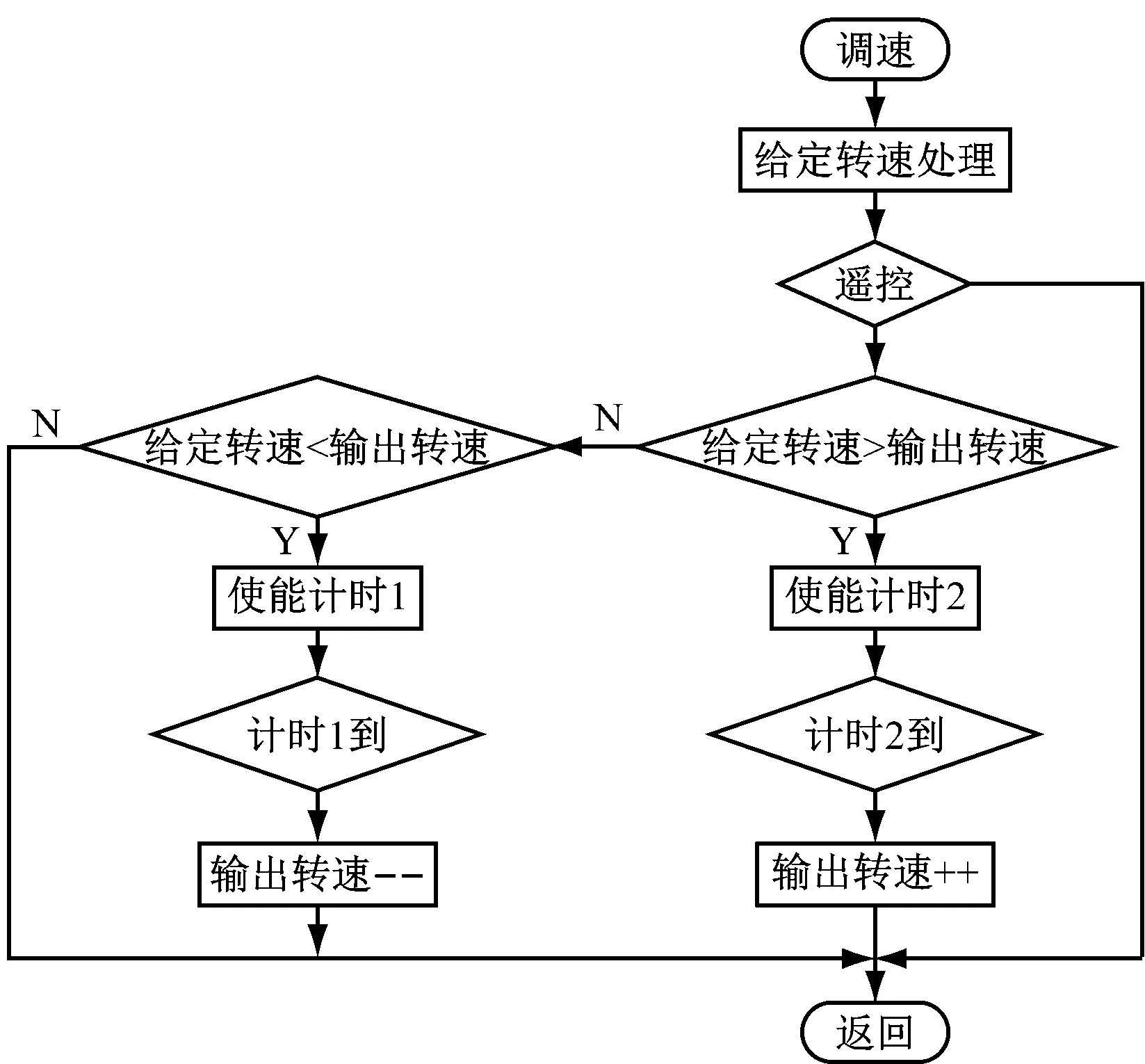
c) 主机调速功能流程
5 结 语
大型船舶低速柴油机电控智能化是低速船用柴油机发展的趋势,相应的电喷柴油机主机遥控系统逐渐成为开发设计的主流。通过分析电喷柴油机主机遥控系统的设计思路和电喷柴油机试车台监控系统的开发设计,可为以后开发设计和维护以低速电喷柴油机为主推进设备的主机监控系统提供一定的参考。
