基于步进电机的工业取料机械手的定位控制
2018-12-28李伟成
李伟成
摘 要:文章首先对步进电机和机械手的结构进行了分析,然后对步进电机工业取料机械手的硬件设计与软件设计进行了分析,以便更好的促进PLC控制的步进电机在注塑取料机械手中的广泛应用,不断提高机械手的定位精度,缩短步进电机的升降时间,从而提高产品的生产效率。
关键词:步进电机;机械手;定位控制
引言
机械手是近代自动控制领域中出现的一项新技术,也是现代工业生产中的一个重要组成部分。当前对于工业取料机械手的控制方法主要采用液压或者气压驱动,这两种方法的控制精度不高,并且不利于生产过程的自动化,而步进电机控制的工业取料机械手定位方法的应用,不仅能够提高产品的生产效率,还能够保障相关工作人员的人身安全,降低生产成本。
1步进电机和机械手的概述
1.1步进电机的概述
步进电机是一种运动执行部件,其具有缺乏积累误差的特点,并可以将电脉冲信号转换为角位移,从而被广泛应用于各种开环控制中。同时,相关人员可以通过发送脉冲个数来控制角位移量,从而达到准确定位的目的,并且其还可以通过控制脉冲频率来对电动机的速度和加速度进行控制,从而达到调速目的。此外,要想将步进电机安装在PLC上,需要步进电机驱动器进行支持,而典型的步进电机驱动系统主要由控制器、驱动器和步进电机三部分组成。
1.2机械手的概述
1.2.1机械手的结构与工作原理
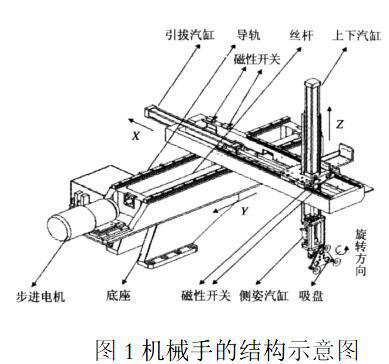
机械手主要是由机械手臂、电机、联轴器、丝杠、导轨、吸盘、底座以及气缸等零部件组成,如图1所示。而对于机械手的工作原理主要包括以下几个方面:第一,在X方向选用普通气缸作为驱动,直线导轨为导向;第二,在Z方向选用高速气缸作为驱动;第三,在Y方向采用不仅电机驱动丝杠的传动方式;第四,在Y自由度上设有限位开关,而在X、Z自由度上、汽缸以及吸盘旋转汽缸设有磁性开关,从而限定机械手移动范围及进行限位保护。
1.2.2机械手控制系统组成
机械手控制系统是采用PLC进行控制,而当中横入横出的部分为了达到机械手的精确定位,则是采用步进电机进行控制。另外,为了实现控制电机启停的平稳性与快速性,要对步进电机的速度进行相应的设计,以便实现对步进电机升降速度的控制。同时,电机是通过联轴器带动丝杠并带动机械臂沿直线导轨横入横出,而引拔、上下行、旋转、抓取部分则全部采用气动控制,同时采用触摸屏进行人机对话十分直观。另外,机械手控制系统的工作模式可以分为全自动模式、单循环模式以及手动模式三种,在实际的应用过程中可以根据用户的实际需求进行选择,从而不仅提高了产品的生产效率,还为相关人员的生命安全及财产安全提供了保障。
2基于步进电机工业取料机械手的硬件与软件设计
2.1硬件设计
2.1.1电机控制
为了能够使电机运行的速度保持平稳性并达到更高的定位精度,就要对步进电机的升降速进行严格的控制。步进电机升降速是由输入脉冲控制,而其转速则是由输入脉冲的频率所决定,并且不会累积旋转角的误差。同时,在高精度、大负载的工业取料机械手中,因机械手的惯性所引起的步进电机失步、过冲等问题都会对机械手的定位精度产生极大的影响。所以,为了保证步进电机不失步、不过冲,实现机械手的精确定位,就要对步进电机的控制脉冲频率进行有效调节。此外,对于步进电机升降速的控制通常表现在升降速曲线中,而常用的步进电机升降速曲线包括直线升降速、指数曲线升降和抛物线升降速等。经过一系列的实践研究表明,当步进电机升降速曲线中的转速上升时,转矩会随速度接近于线性下降,并且这个转矩是电磁转矩和阻力矩之间的差值。
2.1.2气动控制
为了使气缸运行速度比较平稳,不断提高机械手的稳定性和工作效率,从而在机械手气动控制系统的每一个独立启动回路中配备了单向节流阀,并且因运用的惯性和气体具有可压缩性,导致在气缸运动到满量程时,如果停止气缸就会产生较大的冲击和噪声,所以在每个气缸接近满量程时要配备磁性开关,从而当气缸运行接触到磁性开关时,电磁阀断电而气缸因惯性作用继续运动,以便实现较好的缓冲效果,减小冲击与噪声。此外,由于PLC控制电磁阀的通断实现了机械手在各自由度的運动,而在实际的生产过程中,因X方向运动行程较小,运动速度较低,中间行程不可调等原因可选用普通汽缸进行驱动,直线导轨作为导向;而在Z方向,为提高生产效率,缩短在该自由度方向的运动时间,可以选用高速汽缸作为驱动。
2.2软件设计
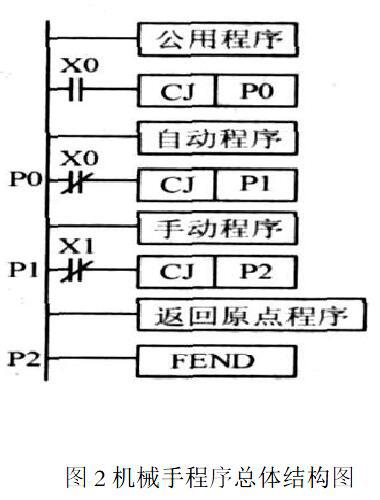
机械手控制系统包括手动、单步、连续、单周期以及回原点五种工作方式,当机械手在电磁线圈断电时,称为系统处于原点状态。同时,图2是机械手PLC梯形图的总体结构图,其包括功用程序、手动程序、回原位程序和自动程序四个部分,其中自动程序又包括系统工作在全自动模式下的程序和系统工作在单循环模式下的程序。而在梯形图中X0为手/自动选择开关,X1为返回原点开关,将其合在一起编程比较简单,同时在梯形图中使用跳转指令能够使自动程序、手动程序和返回原点程序不同时执行,从而为机械手的稳定性和工作效率的提升提供了有效保障。
结束语
总而言之,用PLC控制的步进电机定位法对工业取料机械手进行控制,能够对控制要求作出快速、准确的反映,并实现对各自由度步进电机运行的合理精确定位控制,改善了机械运行平稳性,缩短了步进电机的升降实践,从而方便、快捷的实现了机械手位置控制,提高了劳动生产率。
参考文献:
[1]郭艳萍,张超英.基于PLC的工业机械手控制系统[J].仪表技术与传感器,2007(09):31-32+56.
