基于单片机的雷达伺服控制系统
2016-04-01崔娟
崔娟
【摘 要】本文以C8051F020为主控制器,设计了一种高可靠性的雷达伺服系统,文中详细介绍了它的硬件组成原理,并给出了相应的软件结构和主要流程。该系统样机已经调试通过,具有工作平稳、噪声小、可靠性高等特点。
【关键词】雷达伺服系统;C8051F020;步进电机
0 引言
雷达伺服控制系统用来控制天线动作,搜索各个方位的目标,实现天线的自动控制的系统。控制系统是由机械传动部分和驱动控制电路组成。系统的结构组成和其它的反馈系统没有本质上的区别,它是由若干元件和部件组成的具有功率放大电路的一种自动控制系统。
该系统实现控制雷达天线的正转、反转、步进、停止,实现人机对话,还要考虑到功耗低、体积小、便于携带的特点,在使用时应该具有高可靠性、传输误码率小,同时还要还要具有开机测试、电池电压采样,欠压报警等辅助功能。本文是基于C8051F020单片机的设计,结合实际要求,将具体介绍该系统的硬件电路原理及软件系统构建。
1 系统整体方案设计
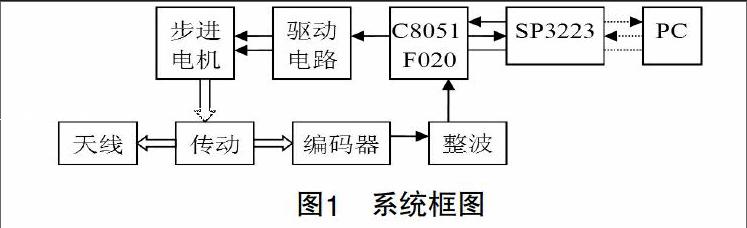
本方案是为了实现对雷达天线的中心角度调整以及在方位上的扫描速度和扫描范围的控制,采用准闭环控制系统,控制步进电机接受控制脉冲一步一步地旋转,防止出现积累误差。此方案采用Silabs公司开发的C8051F020单片机作为主控制器,NS公司推出的LMD18245作为步进电机驱动器,当单片机接收到终端命令时,控制步进电机进行相应的动作,系统中光电编码器与步进电机同轴,光电编码器将步进电机的动作反馈回单片机,从而实现对雷达天线的闭环控制。该系统通过RS232A串口进行通信和调试。系统总框图(图1)如下:
2 硬件电路设计
硬件电路主要包括主控C8051F020和驱动器LMD16245构成的控制电机电路、编码器读数经过整形电路回馈给主控的反馈电路、主控和串口芯片构成的通信和测试电路、电池电压采样电路及欠压报警电路。
主控单片机C8051F020是一款真正独立工作的片上系统,将C8051F020用于嵌入式控制系统,可大量减少外围器件,充分发挥C8051F020的高速度特点,大大提高了系统的集成度。内部包含数字电路和模拟电路,在设计时应该将模拟电源和数字电源分别连接,最后要通过磁珠(或电感)连接在一起;由于步进电机功率驱动电路工作在较大脉冲电流状态,电路中采用光电耦合器将主控单片机与步进电机隔离,这样可以避免单片机与步进电机功率回路的共地干扰。单片机控制信号LVTTL和光电编码器与控制电机之间的和TTL电平之间用74LV4245进行电平转换。原理图模块设计如下介绍:
2.1 光电隔离
采用光耦集成电路TLP521实现隔离,不需要复杂的设计,就能达到防止干扰的目的。由于光耦的输入端电流较大,直接使用CPU的引脚驱动会对CPU产生较大的电流冲击,所以先用74LVX4245进行驱动,然后控制光耦工作。
2.2 电平转换
CPU及外围电路用3.3V供电,CPU引脚直接输出的是LVTTL电平,为了与外部TTL电平兼容,并且提高驱动能力与减少干扰,采用集成电路74LVX4245实现电平转换。
2.3 驱动电路
驱动电路采用集成电路LMD18245,最大输出电流3A,内部含16细分电路,也可以外接电路再细分,外围电路简单。细分功能完全是由驱动器靠精确控制电机的相电流所产生的,与电机无关。
2.4 电源转换电路(DC/DC)
驱动部分电路容易受到干扰,与CPU部分的供电电源分开,利用2个DC/DC集成电路产生2路5V电压,一路提供给光电编码器,并经变换提供给CPU,另一路提供给光藕和驱动电路的逻辑电平。
2.5 JTAG
片内JTAG接口可直接对对安装在最终应用系统上的产品MCU进行非侵入式(不占用片内资源)、实时在系统仿真调试。该调试系统支持观察和修改存储器及寄存器,支持断点、单步、运行和停止命令。在使用JTAG调试时,所有模拟和数字外设都可全功能运行。
3 软件部分设计
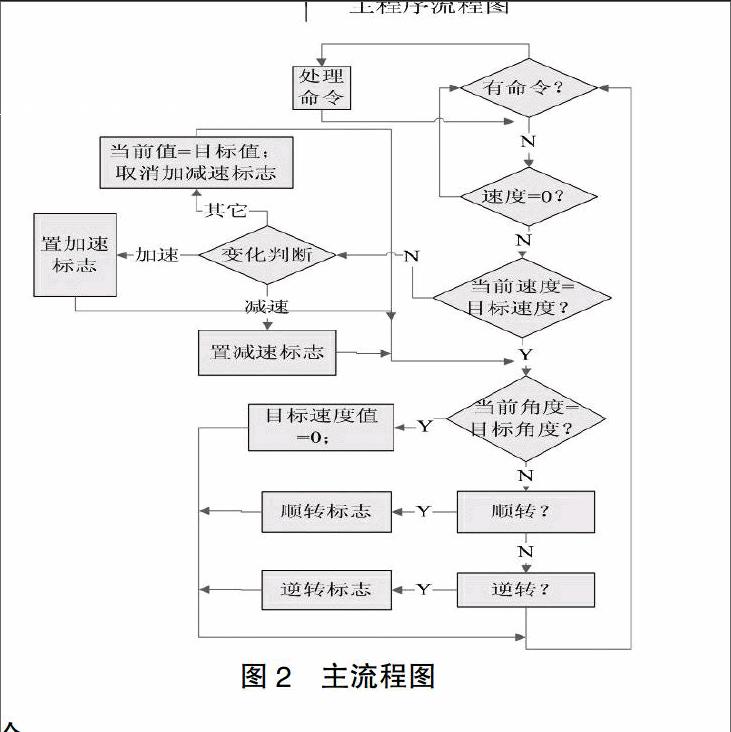
本系统采用角度与速度准双闭环控制。角度反馈是伺服的主反馈回路,时实角度由光电编码器采集得到;速度反馈是一个局部反馈回路,前次的速度值只是软件的记忆值,外部没有速度传感器,所以在本文中称为准双闭环控制。在任何时刻当角度与速度发生变化时,系统都必须响应,速度值的控制由软件设置中断周期来完成,编写程序时,特别注意中断、存储器、运算符号位的管理,提高系统的可靠性。主流程图如图2所示。
4 结论
本文提出的基于C8051F020的雷达伺服控制系统在雷达整机样机中调试通过,并能够正常的工作。使用细分驱动器更加精确的控制了步进电机的相电流,大大的改善了电机的振动和噪音,消除了电机的低频振荡,提高了电机的输出转矩。单片机C8051F020本身就是低功耗设计,还可以通过改变系统时钟、复位源及片上外设等状态来节省功耗。
【参考文献】
[1]http://www.xhl.com.cn\datasheets\C8051F02x.pdf[OL].
[2]http://www.national.com\LMD18245.pdf[OL].
[3]张迎新,雷文,姚静波.C8051F系列SOC单片机原理及应用[M].北京:国防工业出版社,2005.
[4]张以杰,李瑞棠.雷达控制系统基础[M].北京:国防工业出版社,1980.
[责任编辑:王楠]
