基于超声波传感器的无人机避障技术研究
2018-12-28程子龙李鹏展
程子龙 李鹏展 刘 佳 ,2
(1.天津职业技术师范大学自动化与电气工程学院,中国 天津 300000;2.天津职业技术师范大学天津市信息传感与智能控制重点实验室,中国 天津 300000)
0 引言
无人机近几年来逐渐出现在大众的视野中, 从刚开始的保持飞行稳定, 再到GPS 以及视觉定位, 以及现在比较火热的无人机壁障, 无人机技术在飞速的发展着,本文就以四轴F450 无人机为例,简述无人机壁障的原理以及实现方法。
1 无人机壁障系统的整体简述
1.1 无人机运行过程及其信号传递
一架多轴无人机运行时至少需要两个部分, 一是安装了自动驾驶仪的多轴机体, 包含电机电调以及机架等部分,二是无线遥控装置,通常来说,无人机驾驶员在地面使用无线遥控装置对无人机下达飞行命令,无人机接受命令后执行具体任务, 实际情况中遥控装置并非直接和自动驾驶仪直接通讯, 而是需要通过接收机进行命令的传递, 接收机需要和遥控器进行对频, 对频成功后安装在无人机上, 其输出端通过信号线与自动驾驶仪的输入端连接,二者之间使用PWM 信号传递数据,如图1 所示:
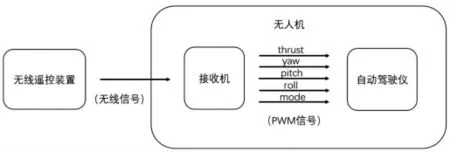
图1 无人机信号传递过程
1.2 信号含义
由此我们可以了解到无人机正常工作时信号的传递过程, 其中接收机与自动驾驶仪之间至少有5 个命令通道:
(1)thrust 拉力通道, 用来控制无人机整体拉力大小。
(2)yaw 偏航通道,用来控制无人机机头的朝向。
(3)pitch 俯仰通道, 用来控制无人机俯仰角的大小。
(4)roll 横滚通道, 用来控制无人机横滚角大小的通道。
(5)mode 飞行模式通道,用来设置飞行模式,一般的自动驾驶仪具有自稳、定高、定点等功能。
了解了各通道的作用后我们知道了通过pitch 通道和roll 通道可以控制无人机的前进、后退、左移、右移,那么就可以通过改变这两个通道的输入值来实现无人机的壁障动作。
2 壁障模块的设计
2.1 壁障系统工作原理
本文以超声波测距模块,ATMEGA2560 单片机为例, 壁障模块需要安装在接收机和自动驾驶仪之间,如图2 所示:
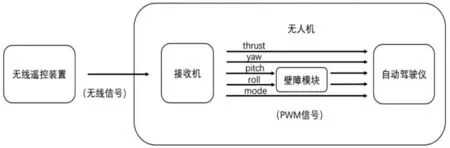
图2 无人机避障模块位置示意图
即壁障模块读取接收机输出的pitch 和roll 信号,同时根据四面超声波传感器所测得的距离, 将计算出的pitch 和roll 信号输出给自动驾驶仪, 实现无人机在无人工干预的情况下实现自动壁障的效果。
2.2 模块设计要求
(1)体积和质量应控制在无人机可载重范围内,否则可能会影响无人机的正常飞行以及续航时间。
(2) 信号的输入与输出应按信号特点接入上拉或下拉电阻, 保证模块运行时的稳定性以及防止传感器未接入时数据出现巨大误差。
2.3 模块工作流程
由于篇幅所限,本文不在此给出详细程序,仅给出模块工作流程作为参考,具体流程如图3 所示:
安全起见, 实际的设计过程中通常会使用一个单独的通道控制壁障模块的工作状态, 当工作在壁障模式的时候,输出给自动驾驶仪的信号是根据输入信号和传感器信号进行计算所得到的,工作在非壁障模式的时候,输出信号即为输入信号,此时的无人机不具有壁障功能,无人机驾驶员可根据具体情况决定壁障模块是否介入飞行系统。
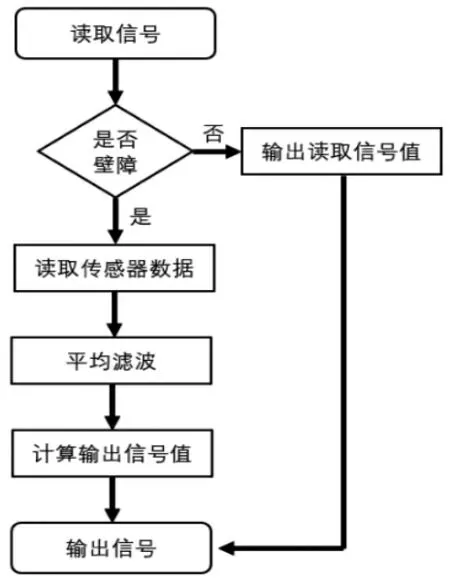
图3 模块工作流程
3 注意事项
此系统在实际使用的时候需要注意以下几点:
(1) 超声波模块对于较大体积的障碍物识别率较高,对细小的障碍物,如电线、细树枝等识别率较低,实际飞行过程中同样需要无人机驾驶员认真观察无人机周围情况,以免发生意外。
(2) 考虑到超声波传感器可能在一些复杂的环境中出现干扰的情况, 所以每个传感器应该轮流单独工作,不可同时工作。
(3)壁障模块工作在壁障模式时,需要进行数据的读取以及计算等工作, 所以信号传输速度相较于不使用壁障模块的情况下有几十毫秒的延迟,对于F450 等机型的飞行效果几乎没有影响,实际使用过程中几乎无法察觉。
4 总结
本文以四轴F450 无人机为例,研究了无人机壁障系统的设计问题。 首先简述了无人机壁障系统的整体结构, 然后研究了壁障系统的工作原理, 壁障模块的设计等问题, 最后提出了实际中使用该壁障模块时的注意事项。
