城市三维数据获取与地物建模方法
2018-12-20陈盼芳石晓芸钱厚童胡海燕聂继位
陈盼芳,石晓芸,钱厚童,胡海燕,聂继位
(1.贵州省第一测绘院,贵阳 550025;2.南京林业大学土木工程学院,江苏 南京 210037)
0 引 言
随着城市信息化进程的推进,数字化及智慧型虚拟城市的建设不断深入,计算机图形学及三维视觉技术发展飞速,虚拟现实、三维场景可视化等关键技术在城市规划、国土资源管理、环境与生态影响评估、移动互联网服务等众多应用领域的重要性被广泛认知[1-2]。如何有效地获取目标三维数据、快速地建立高精度三维模型已成为了目前制约模型量测、分析、设计与预测技术的关键因素。
近年来,城市三维建模研究有了显著的突破[3-4]。谭仁春等提出了一种城市三维建模的新方法,解决了由庞大的纹理数据量所导致的三维可视化引擎的数据调度和实时展示问题[5]。Shum等利用一个基于用户输入的约束系统从全景图中恢复出分片平面模型[6]。Devevec等从一些参数化的基本几何形体出发实现了建筑场景的交互建模[6]。Tomasi等人利用仿射分解解出三维结构和相机运动,基于光流的跟踪器技术,解决了点的匹配问题[7]。
根据空间信息所包含的内容,城市三维建模的对象主要为地表三维建模(包括交通干道、各类构筑物、植被、水域等模型的建立)和地下三维建模(如地质层、地下管线、地下通道、地铁等模型的构建)[8](图1)。对于不同的建模对象,三维数字城市模型(3DCM)的构建流程一般包括三维信息获取、三维模型绘制、三维模型优化以及模型开发应用四个阶段[9]。同时,根据模型绘制原理的不同,可将三维模型绘制的方法大致地分为基于几何的建模(GBR,Geometry Based Modeling)以及基于图像的绘制(IBR,Image Based Rendering)两大类[10]。
本文针对地表建模,就城市三维模型构建的四个阶段,详细着重地阐述三维信息获取、三维模型绘制的整个处理过程,说明各个过程的研究重点与现状,介绍每种方法在各个领域的应用、所存在的不足以及今后的发展动向。

图1 城市三维关键技术分类
1 城市三维空间信息的获取
城市三维数据的获取方式主要有传统数字测图、三维激光扫描和航空摄影测量等。根据不同的需求,获取三维数据的类型和方法不同,使用的设备、数据以及建模的过程也有很大的区别。三维模型绘制的方法很大程度上取决于所获取的三维数据类型,且不同的技术方法可以互相结合,相互嵌套使用[2,8]。
1.1 数字测图
传统数字测图可运用于城市大比例尺地形图的测绘,通常有控制测量和碎部测量两个步骤,具体包括角度测量、方向测量、距离测量、高程测量和坐标测量等[11]。角度测量包括水平角、垂直角和方位角的测量,目前常使用的仪器为电子经纬仪。方向测量所确定的是任意方向与真北方向间的夹角,经常使用陀螺经纬仪和陀螺全站仪来完成。距离测量主要有直接丈量法、间接视距测量和物理测量。使用控制测量获得的点三维数据进行内插所生成DEM数据可用于城市地形和植被的表达。此外,大比例尺地图可在几何建模中作为城市三维模型建设的底图,与摄影测量等数据获取方式相结合起到影像纠正的作用,使所建模型更精确[3]。由于传统数字测图存在工作量大、大范围测图精度变低以及受天气条件限制等劣势,往往要与其他数据获取方式结合使用才能发挥出它的效用[7-9]。
1.2 GNSS对地观测
在大比例尺数字测图中,全球导航卫星系统(GNSS,Global Navigation Satellite System)也可作为获取点三维坐标的一种方式。目前,处于工作状态的导航卫星系统有全球定位系统(GPS,Global Positioning System)、全球导航卫星系统(GLONASS)、北斗卫星导航系统(BDS)和伽利略系统(GALILEO),均在地面三维信息的获取都起着相当重要的作用。GNSS测得的数据经过数据的传输和分流、整周模糊度估算、周跳修复、基线向量解算、平差以及坐标转换等处理,获得空间三维坐标,再结合其他三维数据建立测区模型。将GNSS对地观测技术结合到城市建模中可有效加快建模速度、提高建模精度。
1.3 三维激光测量
三维激光扫描技术属于非接触主动测量方式,根据测量原理的不同可分为脉冲式、基于相位差以及基于三角测距等。其中,脉冲式三维激光扫描测量仪是最为常见的激光扫描测量仪器。在测量时,激光脉冲发射器驱动激光二极管周期性地发射激光脉冲到目标表面,再由目标反射信号至接收透镜,产生接收信号。利用时间计数器计算信号发射与接收的时间差,以扫描器发射中心为原点,计算采样点到原点的空间距离向量,得到采样点的三维坐标信息,继而运用空间点阵扫描技术获得目标的表面立体模型[12](图2)。
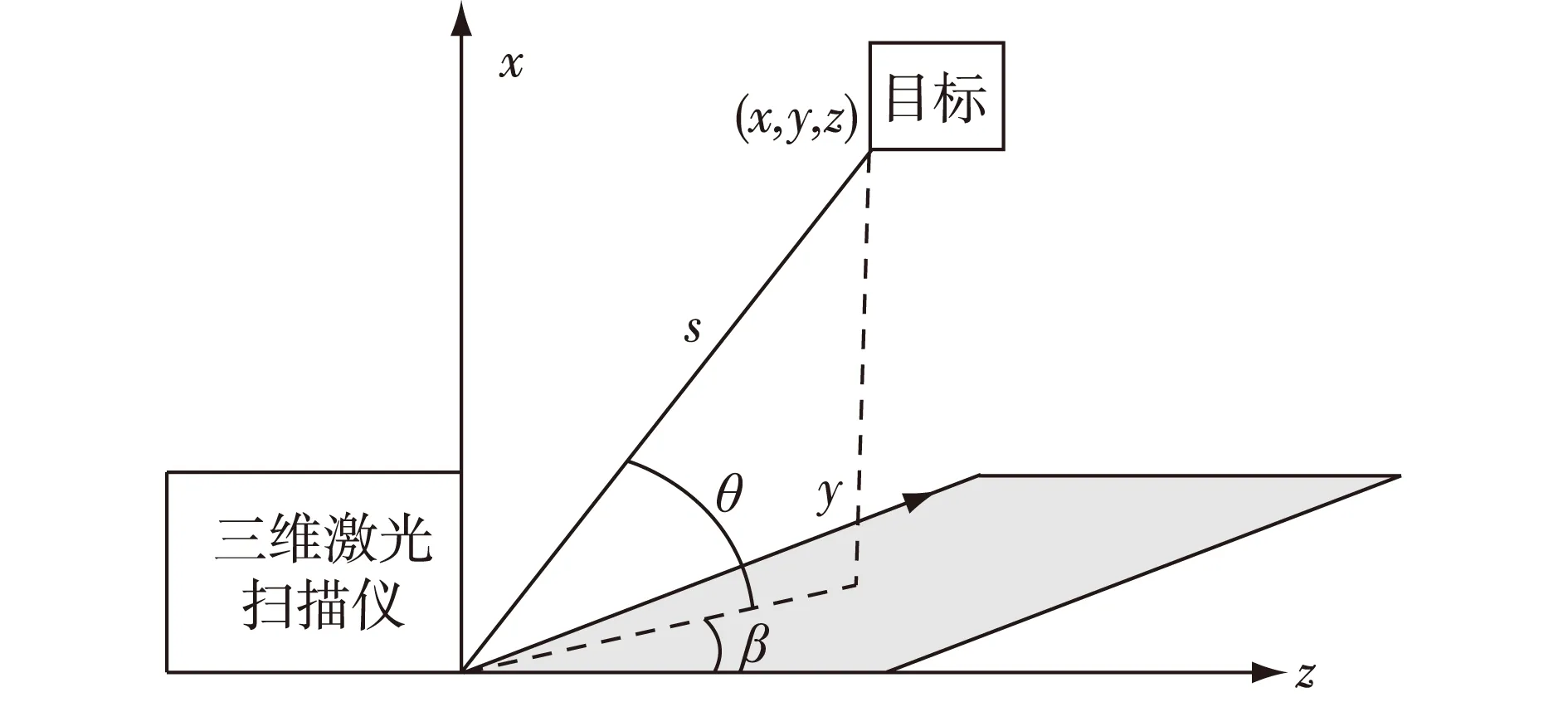
图2 三维激光扫描仪测量原理[13]
在利用三维激光扫描系统获取目标表面的三维空间信息的过程中,点云数据的处理是最关键的步骤。其处理的内容包括数据的误差分析、数据的存储与管理、点云去噪、点云配准、点云分割、点云特征的识别和分类等。其中,从大量不规则点云中分别过滤出不同的地物点并进行目标识别和分类是数据处理的重点和难点。地物的三维空间信息可直接从激光扫描数据中提取,即:① 从原始点云数据中生成TIN结构的连接点地面;② 利用基于强估计的MDL准则来设计地物分类程序,得到来自不同高度回波的特性来区分人造物体和植被,进而利用基于高度差异的二阶偏导所形成的各类目标的价值函数来具体区分建筑物和其他人造物;③ 假设建筑物由相连接的平面表面组成,同一平面上相邻的TIN面在噪音水平内有相同的方向,屋顶方向的其他变化造成二阶导数为非零值,从而形成沿扫描线的建筑物几何模型。
1.4 摄影测量
对于较大范围城市三维模型数据,可利用航空摄影测量手段来获取,主要包括低空摄影测量、近景摄影测量和倾斜摄影测量。具体流程为:以通过外业采集获得的像控点成果作为控制资料,对原始数据进行空三加密;利用空三加密成果进行模型框架数据的采集;利用航片来制作城市三维模型的纹理数据[11-12]。
(1)低空摄影测量依据平台的不同大致可分为无人驾驶低空摄影测量和轻小型多功能对地观测传感器系统两种[13]。目前最为典型的便是无人机航空摄影测量,它具有操作轻便、机动灵活、价格便宜等优点,也可使用非量测相机,但对操作人员的技术要求很高,存在飞行姿态不稳定、像幅小、基高比小、重叠度大等缺点。
(2)摄影机至被摄物体的距离不超过300 m的摄影测量被称为近景摄影测量,它可确定被摄物体的大小、位置和几何形状[14]。摄影机分为量测和非量测相机,使用量测相机的摄影方式主要有正直摄影、等偏摄影和交向摄影三种。非量测相机的光学性能较差,且有内方位元素不稳定、没有框标即定向设备等缺点,但其使用方便灵活,拥有价格较低、可任意调焦、摄影方向可根据需要选择等优点。
(3)航空倾斜摄影测量通过在同一飞行平台上搭载多台航摄相机,同时从垂直、倾斜等不同的角度采集影像来获取地面物体的完整信息[15]。具有高精度、高分辨率、能获得真实表面纹理等优点[8,12]。
在摄影测量中,IMU数据、POS数据和相关数据处理方法则会提高城市三维信息获取的精确度。IMU是一种惯性测量单元,主要运用于INS姿态测量中来感测飞机或其他载体的加速度,经过积分等运算获取载体的速度和姿态。POS数据可用于解算外方位元素和地物点的地面坐标,有直接地理定位(DG)和集成传感器定向(ISO)两种方式。IOS解算方式就是将测定的定位定资参数代入到摄影测量区域网平差中,经过空三加密等统一地数学模型和算法解出结果的过程;直接地理定位则将POS数据直接用来反演成像,用立体像对来进行前方交会,确定像点的地面坐标,该方法不需要摄影测量加密,与前者比较更加便捷[5,11]。
2 城市三维建模的构建方法
城市三维建模研究综合了地理信息系统、摄影测量学、计算机视觉、计算机图形学、图像处理和虚拟现实多个学科,是目前国内外研究的热点。目前基于计算机视觉及图形学的三维建模研究大致可分为基于几何的建模(GBR,Geometry Based Modeling)和基于图像的绘制(IBR,Image Based Rendering)两大类。
2.1 几何建模
基于几何建模的方法通常利用建模平台依图手工搭建模型。几何空间模型可分为如下几类[9,11]:
(1)建立三维线模型:典型的有线框建模[13]。线框模型由一系列点、直线、圆弧及某些二次曲线组成,描述实体的轮廓外形。线框建模利用基本线素来构成立体框架图,是其他构模方法的基础。线框模型能很好地弥补其他模型不能准确描述研究对象各要素之间空间拓扑关系的缺陷。
(2)建立三维面模型:通过定义基本面素,将形体表面划分成一系列多边形网格平面或曲面片,再用这些小的平面或曲面片去逼近形体的实际表面。常见的曲面模型有Bezier曲面、B样条曲和coons曲面。曲面建模能更好地控制曲线度,使模型更贴合物体的真实表面。
(3)建立三维体模型:即实体模型,通过定义基本体素,利用体元的集合运算或基本变形操作来实现模型构建的方法,主要有边界表示法(B-Rep)、实体几何构造法(CSG)、CSG与B-Rep混合表示法、空间单元表示法(分割法)、体素法和扫描法。实体模型三维立体感更强,但只能建立正则实体,对于抽象形体模型的建立层次感较低。
目前,用于实现三维建模、比较知名的平台有3DMAX、SoftImage、ArcGIS以及SketchUp等[14,15]。几何建模依靠成熟的造型软件手工搭建模型,比较直观精确,具有视点自由、支持功能复杂、模型描述完备等优点,缺点在于:① 几何建模虽精细,但人机交互工作量大,建立大范围建筑群是效率不高。② 几何建模使用贴纹理的方法来增强模型的逼真度,但始终无法就超越图像绘制。③ 所贴纹理数据组织简单,但当数据量大时,则不利于模型的展示,且易造成数据冗余。
2.2 图像绘制
基于图像绘制建模(IBR,Image Based Rendering)即采集来自不同视点的场景照片、绘制图像、视频图像以及深度图像等,将其拼接成新的具体全景图[8,9]。IBR系统的结构相对简单,所建模型较逼真,适用于不同大小的物体建模,建模效率高,但在大规模场景构建中,存储和空间深度信息的表达会受到限制[11]。
基于图像绘制建模的方法总体上可大致分为:① 基于单幅图像的几何建模,即采用传统的基于明暗、纹理、焦距等线索对单幅图像进行几何建模[6,14]。此法对待图像中景物的形状、曝光程度以及反射属性等都有很严格的限制,只适合于一些特殊场景的建模;② 采用立体视觉方法建模,即利用两幅或更多幅已经定标的图像并采用立体视觉的方法来进行模型的几何重建[12];③ 基于侧影轮廓线的几何建模:即以透视投影的方式从多个视角观察某一空间物体,从而得到一条侧影轮廓线来建立几何模型[13];④ 基于深度图像的几何建模:属于一种主动方法,可大大简化重建过程[14]。
基于几何和图像的混合建模(IMBR,Image Based Modeling And Rendering)是目前三维建模研究的热点,该方法结合了图像建模逼真的优势以及几何建模人机交互直观精确的优点,按照具体的方法可大致分为轮廓法、亮度法、运动法、明暗法、纹理法、变焦法和交互法等。同时,在大规模城市场景构建的研究中,由于渲染对象的复杂度较高,数据预处理和渲染过程中必须将模型精简成层次细节模型(LOD Model)[15]。
3 结 语
从三维数据获取和三维模型构建两方面出发,本文深入探讨了当前城市三维数据获取及建模的技术方法和发展趋势。在数据获取方面,传统的数字测图方法逐渐被GNSS对地观测、三维激光测量和摄影测量等技术所代替,数据源呈现出多元化、高精度的发展趋势。在三维建模方面,基于几何和图像的混合建模融合了基于几何特征的建模和基于图像绘制的建模两种方法的优势,使所构建的模型更加逼真,人机交互更加便捷。
总之,在地理信息系统、计算机视觉和计算机图形学等技术发展下,城市三维建模数据获取及建模方法得到了明显提升,建模精度、可视化表达和建模速度等得到明显改善,其在城市规划、国土资源管理、环境与生态影响评估等领域的运用将日益深入。