基于无人机系统的真正射影像制作及其精度检测
2018-12-20沈泉飞潘九宝黄明伟
沈泉飞,潘九宝,王 玮,黄明伟
(江苏省基础地理信息中心,江苏 南京 210013)
0 引 言
真正射影像(True Digital Ortho Map, TDOM)是利用数字表面模型(Digital Surface Model, DSM),采用数字微分纠正技术,纠正地面上每一点的投影差,逐像素镶嵌而成的正射影像图。影像上每一点都保持垂直视角,解决了城区大比例尺DOM镶嵌困难及地表信息遮挡等问题。
正射影像镶嵌是传统DOM制作中一道重要的手工操作工序,需要逐张单片正射影像编辑镶嵌线。无人机影像像幅小,数量多,编辑镶嵌线费时费力。而真正射影像是基于DSM逐像素进行正射纠正并镶嵌的,纠正完成后即生成TDOM,省却了镶嵌线编辑的步骤。因此,基于无人机系统来获取高重叠影像就成为目前TDOM制作的最佳选择[1-3]。本文将探讨基于无人机系统的真正射影像(TDOM)制作方法,并进行精度检测。
2 基于无人机的TDOM制作方法
TDOM的制作需要针对任务要求、无人机的特性以及遥感影像处理系统的特点等情况来具体实施,主要由航摄参数设计、数据获取、空三加密、DSM计算和正射纠正五部分构成,其每一步骤的处理都是影响TDOM精度的关键。基于无人机系统的TDOM制作关键流程如图1所示。

图1 基于无人机系统的TDOM制作基本流程
2.1 航摄参数设计
航摄参数设计是要达到针对任务区域实现任务要求的技术指标,并实现航摄区域的完整覆盖。
2.1.1 地面分辨率
地面分辨率是航摄参数设计的首要考虑因素,过高的地面分辨率会使影像数据量增大,进而增加后期影像处理的工作量,降低效率。若分辨率达不到要求,则会导致某些地物的重要细节无法判读或判读错误,从而使得最终成果达不到规范要求的精度[4]。航摄分辨率应当优于成图的地面分辨率。
2.1.2 航高
由于无人机航摄数码相机一般为定焦镜头,假设相机焦距为f,地面分辨率为G,相机像元尺寸为μ,则航高H计算公式为:
H=G×f/μ
(1)
2.1.3 影像的重叠度
无人机飞行姿态较差并且相机的像幅较小,为了满足成果精度要求通常需要增大影像重叠度。影像的航向重叠度主要通过相邻摄站间的基线长度来控制,旁向重叠度通过设置航线数目来实现。航向重叠度的计算公式为:
Q= 1-B/GL
(2)
式(2)中:Q为航向重叠度,B为基线长度,G为地面分辨率,L为影像宽度。
2.1.4 航摄区域划分与航线规划
针对较大面积作业区域,应针对测区特点和无人机特性制定相应的航摄分区,且分区间应保持一定的影像重叠,航摄分区划分应尽量规则,方便后期像控点的布设。一般情况下,航线规划根据地形地势走向按照东西或南北方向设计,也可以依据海岸线、河流、高压线等参照物设计。
2.2 数据获取
无人机依靠航空技术、数码摄影技术、通信技术、GPS差分定位技术相结合来快速获取地表信息[5],其数据获取又分为影像数据获取和地面像片控制点数据获取两部分。
2.2.1 影像数据获取
天气因素会影响无人机航摄中整个影像的质量和成果精度,应尽量选择无风或少风的天气;其次,航摄时,要保证有充足的日照采光条件,避免影像因光线不足而画质暗淡。
2.2.2 像控点量测
像控点布设方案的好坏直接决定着空三加密精度的高低,是低空无人机摄影测量中影响测绘成果的关键步骤[6]。无人机航摄一般通过PPK(动态后处理)技术得到较为准确的POS数据,因此只需少量控制点即可满足成果精度的要求。在航摄区域边缘和内部布设一定数量的控制点,以控制成果精度和供精度检验。
2.3 空三加密
空中三角测量是在航空摄影测量中,依据少量的野外控制点数据,在计算机上进行影像定向和加密的测量方法。光束法是使用最普遍的一种方法,它以共线方程作为其理论基础,将一束摄影光束作为平差的基本计算单元[7]。为了快速完成测区影像的控制定位,采用POS数据加少量像控辅助进行区域网平差 。
2.4 生成高精度DSM
TDOM 是利用 DSM 进行数字微分纠正的。DSM精度的高低是TDOM质量好坏的关键,也是提高工作效率的关键。高精度DSM要求影像的航向重叠度和旁向重叠度分别达到 80% 和 75% 以上,原则上要求基高比(B/H) 小于0.3[8]。根据摄影测量的基本原理,基高比降低的同时,高程精度也会降低。但利用多目视觉原理,通过多个像对生成的高程值,最后能够得到精度较高的高程值。
2.5 真正射纠正
数字微分纠正是利用共线方程,根据相关参数与DEM 或 DSM,从原始非正射投影的航摄影像获得正射影像的过程。DSM 保留了建筑物、桥梁和树木等地表一切地物的高程信息。因此TDOM在 DSM 的基础上对影像进行几何纠正,并重采样最终生成TDOM,不但对地形进行了纠正,也对地表建筑物进行了正射纠正,消除了建筑物投影差,从而保持了垂直下视角度的地表景观,避免了传统DOM上建筑物互相遮盖的现象。
3 TDOM制作实例与分析
3.1 TDOM的制作
本文以江苏省宿迁市的特色小镇—京东筑梦小镇为研究区域,采用Pix4D软件进行了TDOM的制作。Pix4D具有体积小,部署灵活,操作简单等优势,适合小范围区域的遥感影像快速处理,是目前无人机影像处理应用较为广泛的软件之一。实验影像数据是采用Wingtra垂直起降固定翼无人机进行航摄。Wingtra无人机结合了固定翼无人机和多旋翼无人机的技术优势,既降低了对场地的要求,又有固定翼无人机一样的续航时间长、飞行速度快等特点。无人机上搭载的Sony DSC-RX1RM2 相机,焦距35 mm,像幅7 952×5 304 pixel。设计航高为574 m,航向重叠度为80%,旁向重叠度为70%,采用南北航线,共计3个架次20条航线,获取影像地面分辨率为7 cm的原始影像517张。
在精度控制方面共计布设了9个像控点,空三加密控制点均方差结果如表1所示。采用8个多余像控点作为检查点,精度如表1所示,满足制作TDOM的精度要求。

表1 空三加密检查点误差结果/m

图2 高精度DSM(左图)和TDOM(右图)制作结果
空三平差完成后进行影像自动匹配,计算生成0.2 m格网间距的DSM。对于一些狭窄区域或者树木遮挡建筑物情况,DSM上的高程值是通过高程
内插得到的,真实的反映地面真实情况,因而可能导致TDOM上的建筑物边缘存在扭曲、拉花的现象,因此需要对DSM进行必要的手动编辑。最后进行影像正射纠正,自动镶嵌生成分辨率为0.1 m的TDOM。
3.2 精度分析
在ArcGIS里将检查点与TDOM和DSM上点位的平面及高程相比较。首先通过目视检查,可以看到检查点点位准确,与TDOM能够完美叠加。其次通过实际点位误差计算,得到其精度检验结果。
平面精度如下表所示(表2),高程精度如下表所示(表3),其值与空三加密的误差结果基本相符。

图3 ArcGIS中加载TDOM和检查点(左图)和检查点位置放大图(右图)

IDX1Y1X2Y2△X△Y△XY1348 007.9313 759 322.738348 007.9073 759 322.7040.0240.0340.0424348 509.1023 759 721.191348 509.0723 759 721.2170.029-0.0260.039……………………15346 442.6143 759 760.816346 442.6213 759 760.785-0.0070.0310.032RMS0.0310.030.043
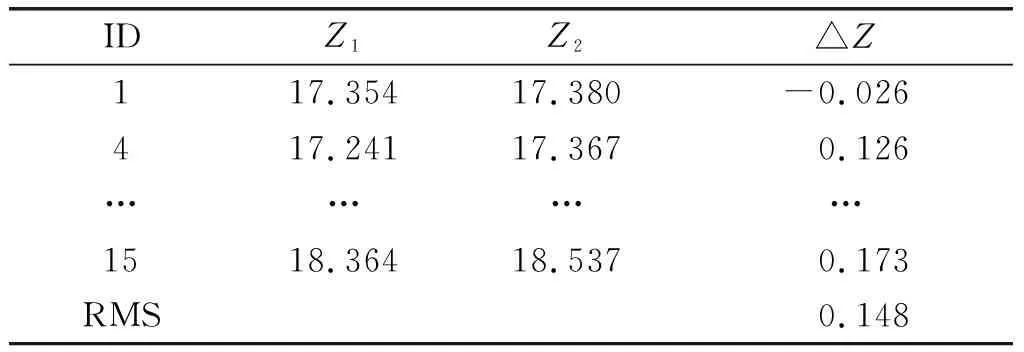
表3 检查点与DSM上高程误差统计/m
4 结 语
本文探讨了基于无人机系统的真正射影像制作方法并进行了精度检验,结果表明精度与空三加密的误差结果基本相符,说明利用无人机系统可以制作高精度的真正射影像。另一方面,随着无人机技术的快速发展,加之其本身存在的成本低、效率高的特点,将来无人机有望取代常规航摄任务。在数据处理时,无人机影像具有画幅小、重叠度高的特点,常规的正射影像制作方法已不能适应现在的需求,而真正射影像的制作方法能够很好的适应无人机航摄的特点,因此,未来真正射影像的需求和应用必将越来越广泛。