多余观测数对方差分量估计结果的影响分析
2018-12-20何思源
何思源
(中铁第一勘察设计院集团有限公司,陕西西安 710043)
理论上来说,利用各种方差分量估计算法推算观测值的方差都只能是近似的逼近,多余观测数越少,所得到的近似逼近效果就越差。当多余观测数过少时,就会出现方差或协方差为负的情况。因此,足够的多余观测是确保估值可靠性的前提。姚一斌[11]等总结出测量平差问题中不同观测条件、不同图形条件下必要观测值数量确定的通用公式,但是没有给出方差分量估计意义下多余观测数对精度的影响;汪晓庆[10]讨论了方差分量估计中必要多余观测数与精度指标的关系,指出当方差分量估值的中误差小于方差分量自身数值的1/2时精度较好,必要多余观测数考虑取20,并通过实验进行了验证,但是对参数小于2时未做研究;在方差分量估计的实际应用中,受各种环境条件的限制,采集到的数据量是有限的。同时,过多的多余观测会增加一定的工作量,影响工作效率。因此,制定评判多余观测数的标准十分重要。
既然多余观测数决定着方差分量估计结果的可靠性,那么多余观测数为多少时才适合采用方差分量估计,还没有明确的统一标准。首先引入多余观测数对方差分量估计结果影响的评定参数,通过实验,统计这一参数随着多余观测数的减少所呈现出的变化趋势,得出相应的结论。
1 方差分量估计中的精度评定
在所有的以最小二乘为估计准则的平差问题中,不论采用何种平差方法,单位权方差的估值公式均可以表示为
(1)
式中,VTPV为观测值残差向量关于权阵P的二次型。df为自由度,也就是多余观测数。根据广义传播定律,并顾及E(V)=0和式(1),可得单位权中误差估值的方差为
(2)
这里略去式(2)右边求迹部分的推导过程,直接给出的方差
(3)
这说明,多余观测数越多,单位权方差的估值就越可靠。
对方差分量估值的精度,需要给出明确的评定标准。下面仅以Helmert型方差分量估计为研究对象,介绍其精度评定公式的推导过程。对于只含有两类相互独立观测值的间接平差,其Helmert方差分量估计的模型为
(4)
其中:
a=n1-2tr(N-1N1)+tr(N-1N1)2
b=tr(N-1N1N-1N2)
c=n2-2tr(N-1N2)+tr(N-1N2)2

(5)
(6)
设
(7)
(8)

2 评定参数
为了能够准确地描述多余观测数对方差分量估计结果的影响,定义评定参数为
(9)
式中
(10)

(11)
方差分量估计公式(4)中系数矩阵S的所有元素之和为
S11+S12+S21+S22=
n1-2tr(N-1N1)+tr(N-1N1)2+
2tr(N-1N1N-1N2)+n2-2tr(N-1N2)+tr(N-1N2)2=
n1+n2-2tr(N-1(N1+N2))+
tr(N-1N1N-1(N1+N2))+tr(N-1(N1+N2)N-1N2)=
n-2tr(N-1N)+tr(N-1N1)+tr(N-1N1)=

(12)
r为多余观测数,又因为
故评定参数与多余观测数有关。
3 实验实例
3.1 实验描述
模拟一个边角网的观测数据,分别对比在不同多余观测数下,方差分量计算结果的精度以及计算效率。
如图1所示,设计一个边角网,给定P1,P2,P3,P4纵横坐标的真值,如表1所示。由坐标真值反算出任意两点间的精确距离,以四个控制点中的任意点为测站点,反算出三个方位角的精确值,其值如表2所示。于是得到一个多余观测最多(共6个距离,12个方位角)的大地四边形控制网数据。
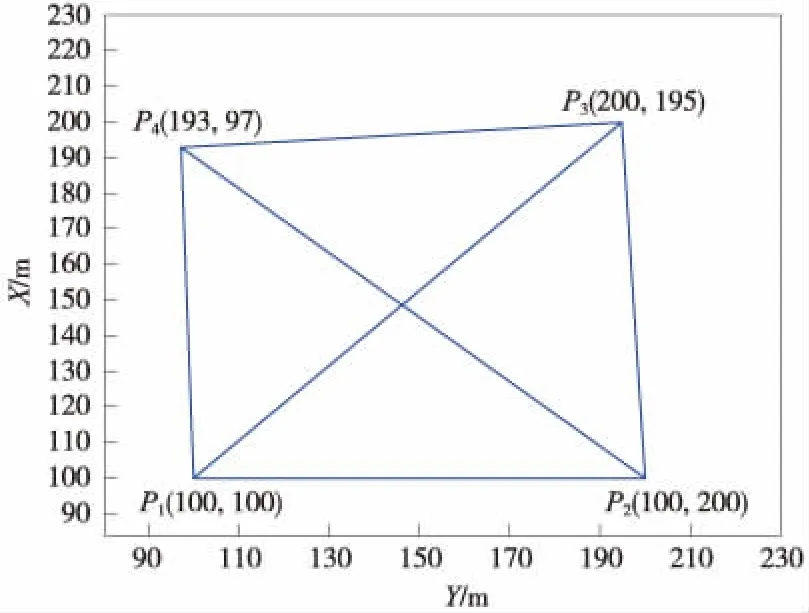
图1 模拟边角网[14]
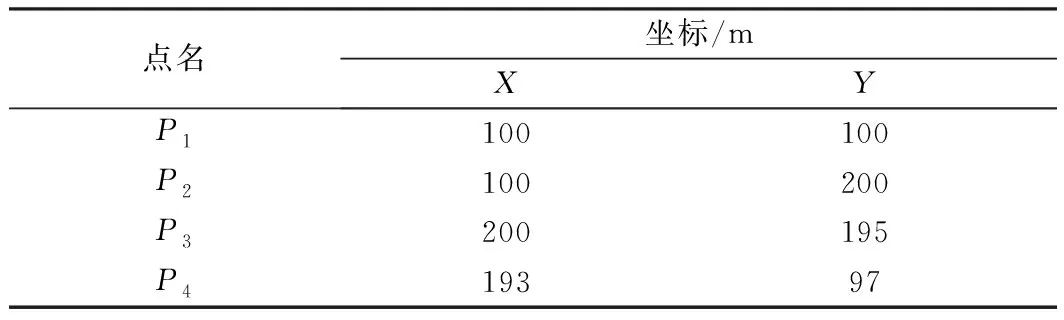
点名坐标/mXYP1100100P2100200P3200195P419397
已知P1点的横纵坐标以及P2点的横坐标,P2点的纵坐标以及P3、P4点的横纵坐标待估。假设距离和方位角观测值的方差未知,数据的处理采用Matlab R2010b,模拟1000次观测数据,每次给距离和方位角的精确值加入期望为0、标准差分别为2″和10 mm的正态分布随机噪声。通过每一次模拟出的观测值,利用极坐标法求出P4、P3点的纵坐标和横坐标以及P2点横坐标的近似值,然后按间接平差的方法列出误差方程,进行平差计算(接下来用到的所有分析数据都由本实验提供)。
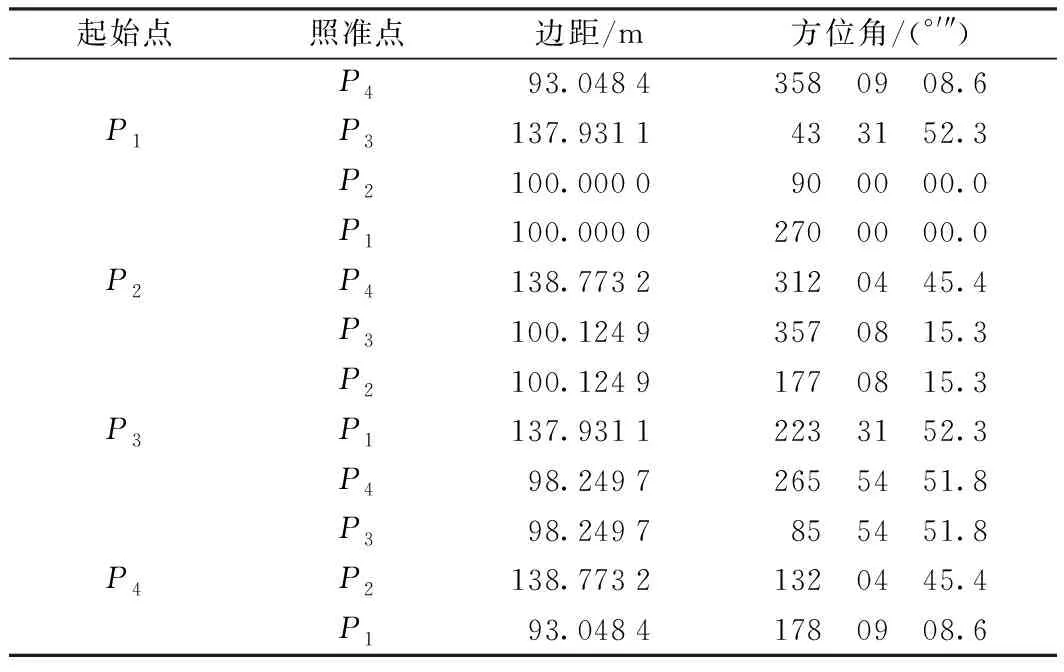
表2 模拟数据距离和方位角
3.2 实验结果分析
采用模拟边角网实验数据,每次给方位角和距离观测值分别加入期望值为0、标准差为2″和10 mm的正态分布随机噪声。该边角控制网中必要观测数为5。
图2~图6显示,多余观测数越少k越大,中误差估值精度越低。 图2和图3分别为方向、距离k值与多余观测数之间1 000次试验的结果。从图2可以发现,多余观测数为5时(即必要多余观测数)方向k值较大,均值为1.314,且在1 000次实验中波动很大;当多余观测数为8时,k值明显减小,均值约为0.7,且在1 000次实验中较为稳定,该结果与多余观测数为9时十分接近;随着多余观测数增加,k趋于稳定,当多余观测数为13时,k值均值约为0.5。从图2、图3可以发现,距离k值呈现明显的聚类现象,即多余观测数为5、8为一类;多余观测数为9、10、11为一类;多余观测数为12、13为一类,对应的k值分别为0.75、0.64、0.58。当多余观测数为第一类时,k值波动较大;当多余观测数为第二类时,k值显著减小且趋于稳定;当多余观测数为第三类时,k值为0.58,且波动很小。
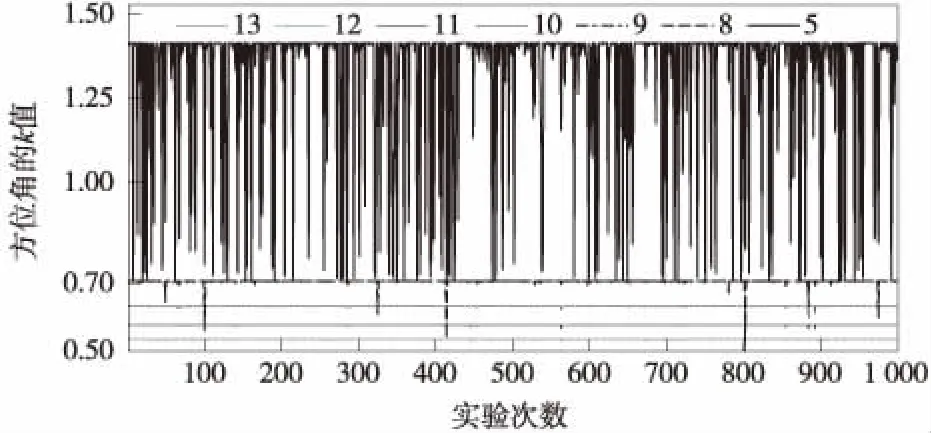
图2 方位角观测值的方差估值的评定参数的统计结果
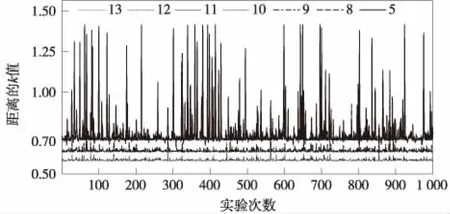
图3 距离观测值的方差估值的评定参数的统计结果
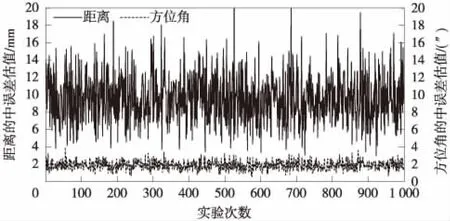
图4 多余观测数为13时方差分量估值的统计结果
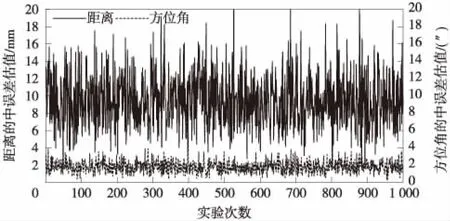
图5 多余观测数为9时方差分量估值的统计结果
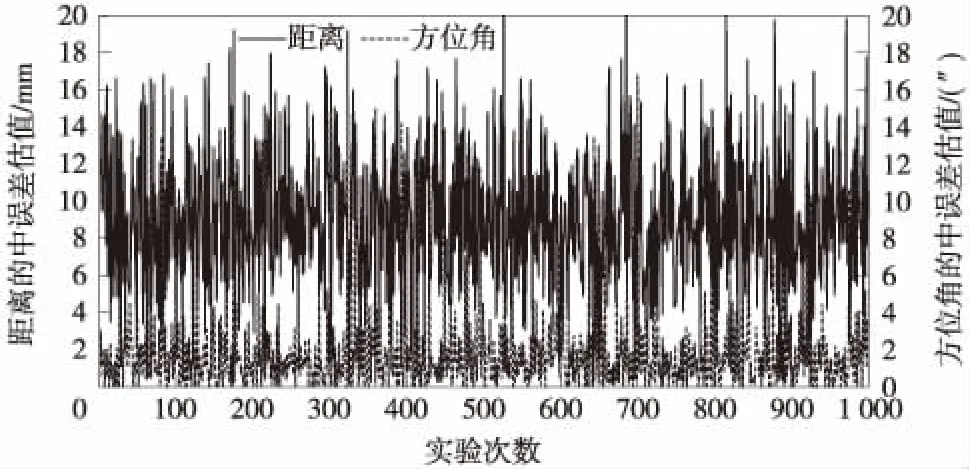
图6 多余观测数为5时方差分量估值的统计结果
从图4~图8可得,当多余观测数为5时,估值精度较低,当多余观测数为9时,估值精度得到了显著提高,并且与多余观测数为13时的结果十分接近。
为了进一步分析多余观测数与k值的关系,通过计算得到k值均值以及k值相对减小的百分比,如图8及表3所示。由图8可知,多余观测数对方向k值影响较大,当多余观测数为5时,k均值为1.314,当多余观测数为8时,k均值为0.706,k均值相对减小了46.3%,当多余观测数大于10时,k值几乎不变;从图8来看,多余观测数对距离k值影响相对较小。从表3可以看到,多余观测数为9时比多余观测数为8减小了11.2%,多余观测数为12时比多余观测数为11减小了8.9%。
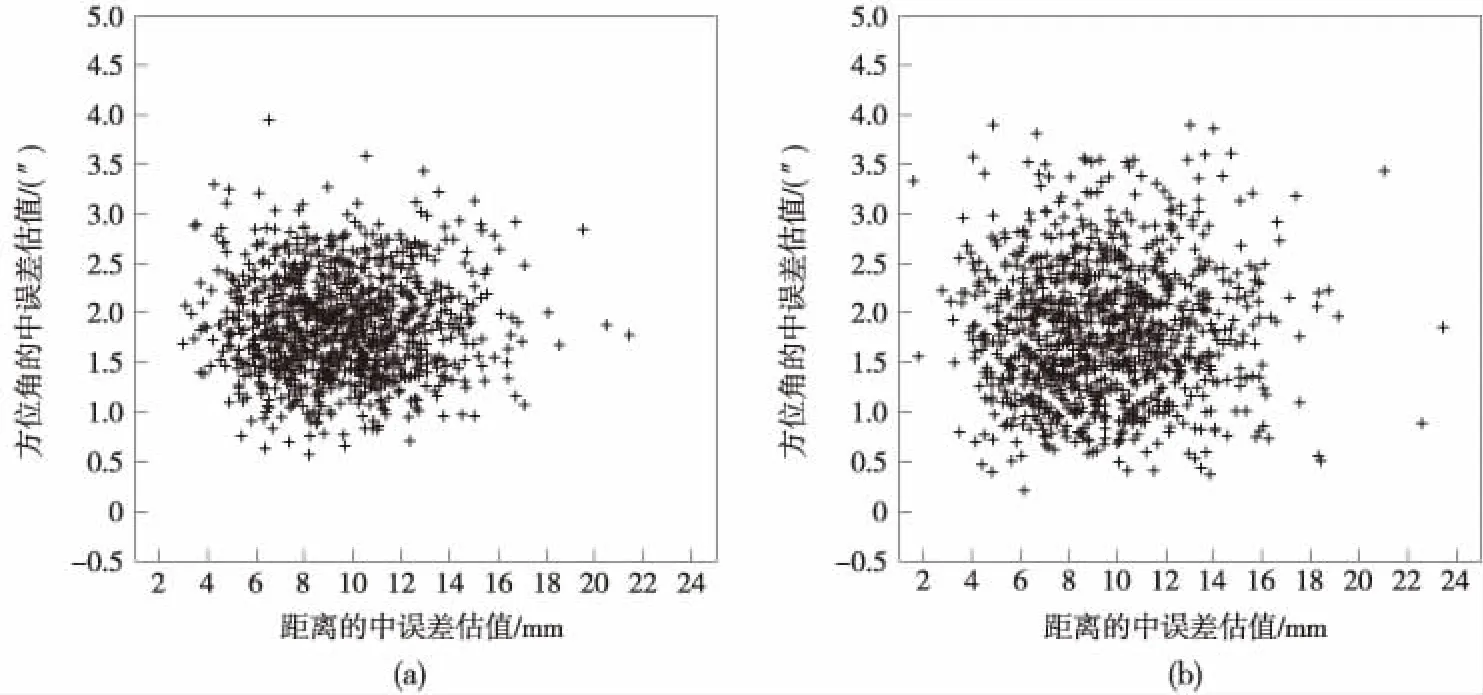
图7 多余观测数为13和9时中误差估值的散点图
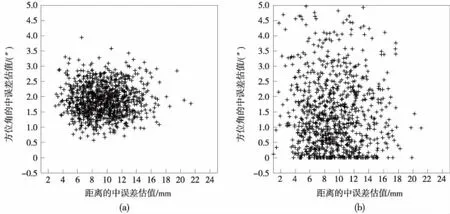
图8 多余观测数为13和5时中误差估值的散点图
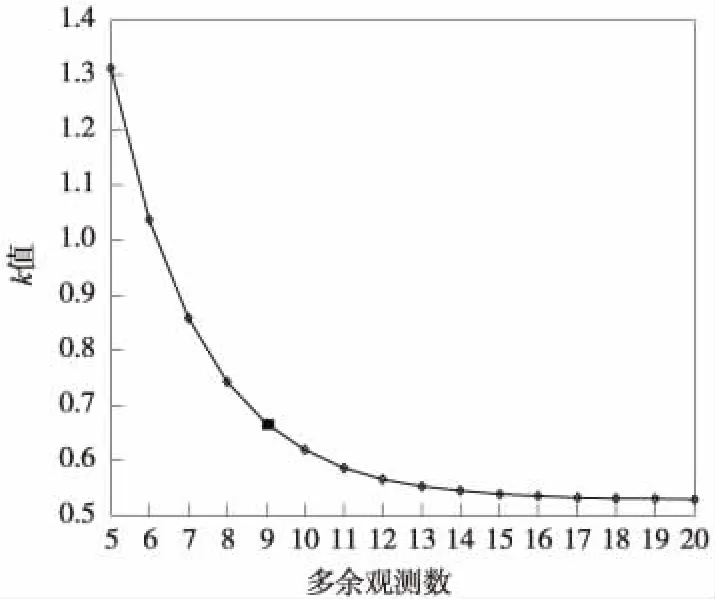
图9 K值均值与多余观测数关系
文献[10]指出,方差分量估值的中误差小于方差分量自身数值的1/2时,估值结果精度较好,此时多余观测数为20;考虑成本、效率等各种因素,这样的要求很难达到。图3显示,距离k具有明显的分类现象,当多余观测数为9时,方向k值为0.707、距离k值为0.644,并且其估值精度相对于5时得到了显著地提高;当多余观测数为13时,方向、距离k值为0.534,0.585,但是从图4、图5、图7来看,其精度提高不显著。通过函数拟合,得到k均值与多余观测数的函数关系,如图9所示。可以发现,当多余观测数为9时,函数在此处斜率最大,即k值显著减小,随着多余观测数增加,曲线趋平;通过图7、图8可以发现,多余观测数为9时中误差估值散点图与13时几乎一致,相对于多余观测数为5时精度得到显著提升;综合考虑精度、效率等因素,认为在本算例中多余观测数取9,即k取0.7为宜。
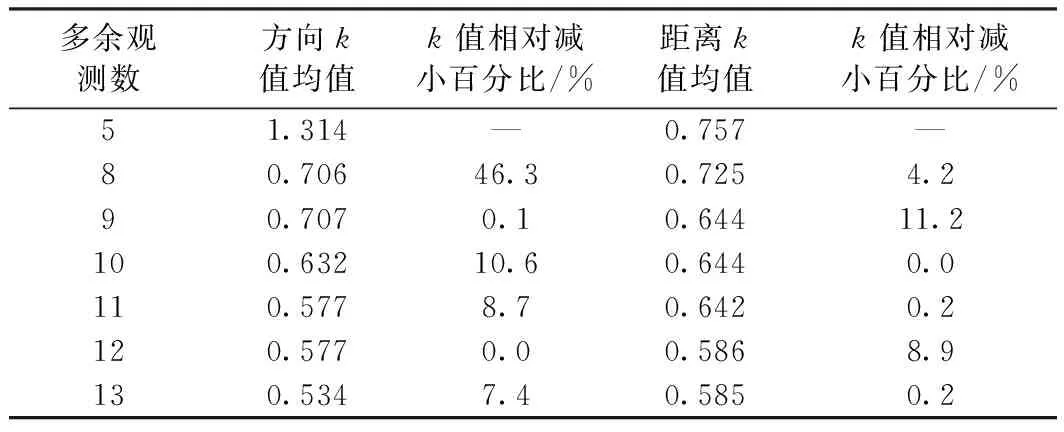
表3 多余观测数与k 值关系
可以得到以下结论:
(1)多余观测数从13减少到5时,方差分量估计结果在一次解算中具有随机性,方位角和距离中误差的估值与模拟精度一致;多余观测数越少,估计结果就越离散。
(2)多余观测数从13减少到5时,方位角观测值方差估值的评定参数由0.54附近变化到1.41附近,距离观测值方差估值的评定参数由0.58附近变化到1.40,即随着多余观测数的减少,k值逐渐增大。
(3)在不同等级控制网的数据平差处理中,可以选取一个合适的评定参数k作为衡量多余观测数对方差分量估值影响的评判依据。在本算例中k的合适取值为0.7。
4 结束语
多余观测数对方差分量估计的精度具有十分重要的影响。方差分量估值的精度随着多余观测数的减少而变差,当多余观测数过少时,所得方差分量的估值会出现负值;在平差处理中,如果要使用方差分量估计定权,为了保证结果的可靠性,必须具有足够的多余观测。
