磁悬浮陀螺全站仪定向成果质量控制方法
2018-12-20何金学张齐勇时丕旭
何金学 张齐勇 时丕旭
(中铁第一勘察设计院集团有限公司,陕西西安 710043)
进入21世纪,高精度的陀螺全站仪越来越广泛地应用于超长隧道的工程建设中[1]。隧道贯通测量中,通常需要布设多条长距离导线,受地下测量条件的限制,导线的图形强度较弱,点位精度较差,而通过加测陀螺定向边,可减少测角误差积累,提高隧道洞内平面控制网的贯通精度及可靠性[2-3]。目前,相关学者对陀螺全站仪及其应用进行了大量研究,如陀螺定向在地下铁道盾构施工测量检测中的应用[4]、井下控制测量中陀螺仪的应用[5]、加测陀螺边对矿山导线测量的精度研究等[6]。以上研究主要为陀螺仪在工程中的应用,很少有文章对陀螺全站仪定向过程的质量控制方法进行研究[7-11]。以下从陀螺全站仪的定向原理与定向过程出发,提出陀螺定向成果质量控制方法,以保证陀螺定向成果的质量。
1 磁悬浮陀螺全站仪定向原理
GAT高精度磁悬浮陀螺全站仪采用磁悬浮支撑技术来代替传统悬挂带技术,在地球自转效应的影响下,陀螺旋转轴产生向测站点子午线方向逼近的指向力矩
M=H×ωecosφsinα
(1)
式中,M为指向力矩;H为陀螺角动量;ωe为地球自转角速度;φ为测站点地理纬度;α为陀螺马达轴与子午线北方向的夹角。
在指向力矩M的作用下,陀螺马达轴会向子午面方向产生进动效应。而此时力矩器通过静电力矩反馈控制技术对灵敏部施加反向力矩M′,使M′=-M,此时陀螺灵敏部处于平衡状态。通过力矩器测量的反向力矩M′和公式(1),即可计算出陀螺马达轴的北向偏角[12]
(2)
通过陀螺角动量,可测定任意测线的陀螺方位角。如图1所示,大圆代表陀螺水平盘,小圆表示全站仪水平度盘,理论上二者应为同心圆。OT为陀螺寻北方向;OM为陀螺马达轴方向;OL为全站仪水平度盘零位方向;OC为全站仪望远镜照准目标的测线方向。
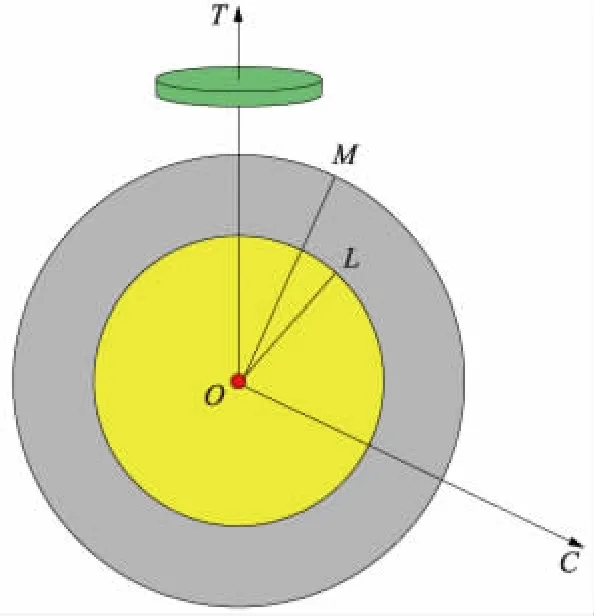
图1 GAT陀螺全站仪轴系结构示意
在定向过程中,首先测量出OM轴与陀螺北方向的夹角∠TOM,再利用全站仪测定角度∠LOC,有
∠TOM+∠MOL+∠LOC+Δ仪=A真=α+γ
(3)
式中,α+γ为坐标方位角与子午线收敛角之和,利用测站点的坐标计算子午线收敛角,便可得出导线边的坐标方位角[13]。
2 磁悬浮陀螺全站仪定向成果质量控制
2.1 磁悬浮陀螺定向测量过程
陀螺定向的基本流程可分为地面仪器常数的标定和地下定向边定向测量。磁悬浮陀螺定向总体过程如下:
(1)在地面常数边测量陀螺方位角(2~3测回),并求得两个或三个仪器常数。
(2)在地下定向边进行两个测回的陀螺定向测量,得到两个陀螺方位角,若有多条导线,依照同样方法进行定向测量。
(3)返回地面后,应尽快在原常数边上再进行两测回或三测回的陀螺方位角测量,再得到两个或三个仪器常数。
(4)利用仪器常数及子午线收敛角再进行计算定向边的坐标方位角[14]。
2.2 陀螺定向成果质量控制
(1)测量前质量控制
磁悬浮陀螺全站仪出厂前,按照规范对仪器内部电子元器件、光学元器件等进行专业检测。
经过长期使用后,仪器的内部元器件可能会由于长时间工作而老化,长途运输、外界温度、磁场等因素均有可能影响仪器的稳定性[15]。因此,测量前可在室内或室外进行重复精度检核(5~10次重复观测),依据的公式为
(4)
其中,An为仪器的单次测量值;Acp为多次测量的平均值;n为测量的次数。当2σ<5″时,说明仪器测量稳定性良好,可以进行高精度的陀螺定向测量。
(2)测量过程质量控制
①进洞前后常数边陀螺定向成果对比
陀螺定向测量依据“3-2-3”的原则进行,即在地面常数边进行3个测回的陀螺定向测量,然后在洞内定向边进行两个测回的测量,最后再回到地面常数边进行3个测回的陀螺定向测量。进洞前后地面常数边测量数据可以反映陀螺在洞内测量过程的稳定性,若常数边进洞前后数据差异较大,说明测量成果不可靠,应重新进行陀螺定向测量。
②常数边与检核边成果对比
对于长隧道的陀螺定向测量,由于距离较长(隧道进口与出口往往距离几十公里),如果只选取进口端或出口端的地面导线边作为陀螺定向测量的常数边,往往难以反应隧道整体陀螺定向测量过程中仪器常数的变化情况。因此,可在隧道的进口端与出口端分别选择常数边与检核边(如图2所示),依据常数边与检核边对陀螺定向成果进行检核并评估长距离隧道内仪器常数的变化规律。
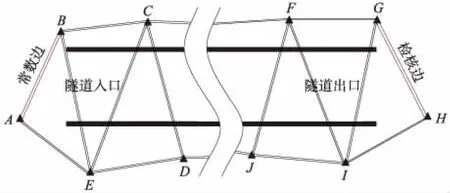
图2 常数边与检核边示意
③洞内对向观测检核
隧道洞内导线边的陀螺定向可采用对向观测的方法,即在地下导线边的两端分别设立测站,各进行两个测回的陀螺定向测量(导线边有4个测回的定向数据)。一方面可以提高观测精度,另一方面可以利用对向观测方位角互差(180°),对洞内观测成果进行检核[11]。
(3)计算成果检核
测量完成后,可通过仪器的内置程序自动计算出陀螺定向成果。也可将仪器内部存储的数据导出,与记录数据核对,利用与仪器程序中不同的计算方法重新计算,并与仪器程序计算成果进行检核。
3 磁悬浮陀螺全站仪在引汉济渭输水隧洞中的应用
以GAT磁悬浮陀螺全站仪在秦岭引汉济渭输水隧洞工程中的应用为例,对陀螺定向成果的质量控制进行介绍。
3.1 工程概况
引汉济渭工程是由汉江向渭河关中地区调水的陕西省内南水北调骨干工程,设计长度为81.78 km,采用隧道的方式穿越秦岭主峰。为保证隧道的顺利贯通,根据现场施工情况,采用GAT高精度磁悬浮陀螺全站仪对5号洞内X21-Z→X20-1Z导线边、6号洞内J35-Y→J34-Z导线边进行陀螺定向;选择5号洞NGPS015-1→NGPS014已知测线作为仪器常数边,7号洞口已知边NGPS018→NGPS019作为检核边对测量成果进行检验(如图3所示)。
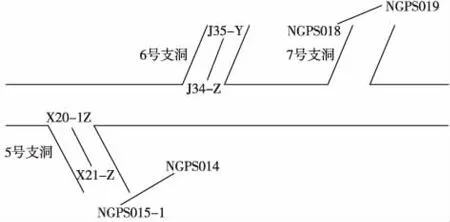
图3 地面洞内陀螺定向边示意
结合工程实际需求,对陀螺定向作以下限差要求:同一条边任意两测回陀螺方位角的互差不得超过10″;测前方向值与测后方向值之差不得大于10″,超限数据应在现场予以补测。
3.2 陀螺定向成果精度评定
(1)测前重复精度检核
测前可在室内或室外进行重复精度检核,本次进行了5次重复观测,并对其稳定性进行分析(如表1)。
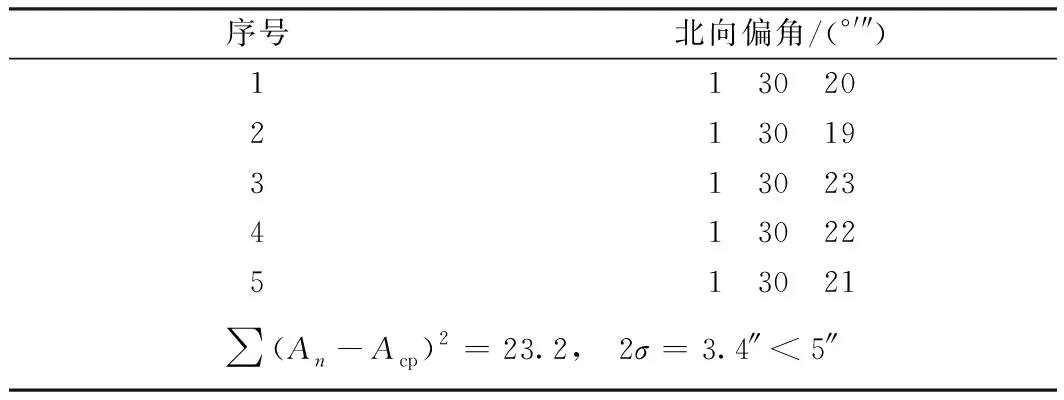
表1 测前重复精度检核
检测结果表明仪器稳定性良好,可以进行高精度的陀螺定向测量工作。
(2)仪器常数的检核
选择5号洞口的NGPS015-1→NGPS014为常数边,7号洞口的NGPS018→NGPS019为检核边。依据地面控制点坐标计算常数边坐标方位角及测站点子午线收敛角,便可得到常数边的真北方位角。再根据公式A=T+Δ(T为测线的陀螺定向值,Δ为陀螺全站仪的仪器常数),结合陀螺定向测量的地面定向成果,可计算陀螺仪器常数,并对陀螺定向测量进行精度评定[16](如表2所示)。
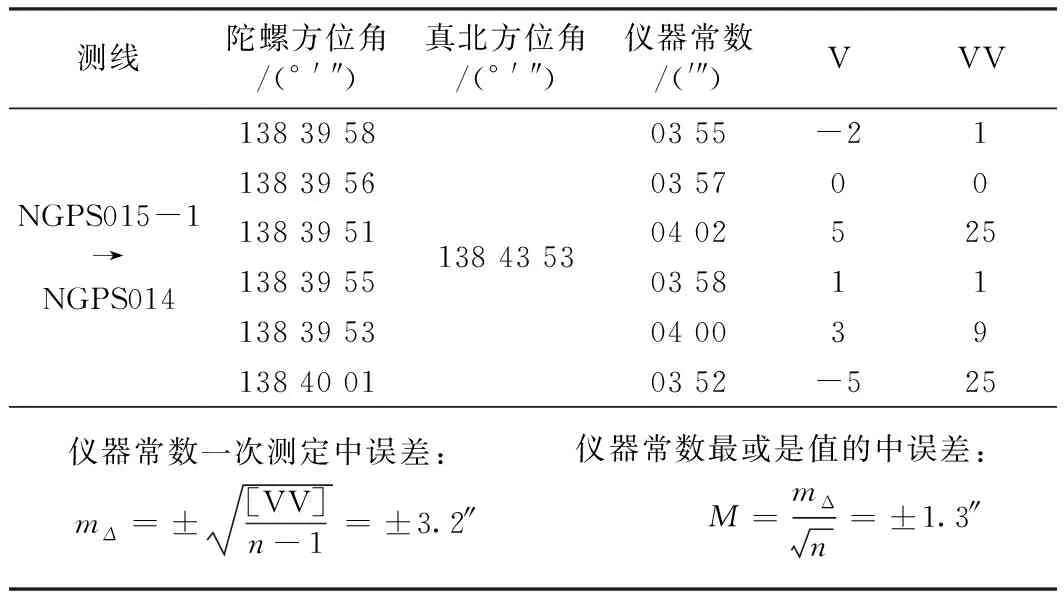
表2 仪器常数精度检核
同理,利用检核边“NGPS018→NGPS019”坐标方位角以及测站点子午线收敛角,可计算陀螺仪器常数
Δ=A-T=0°04′04″
两次仪器常数最大较差值为7″,说明仪器常数测量可靠性较高。
(3)陀螺定向成果稳定性分析
依据地面、洞内多条双次测定陀螺方位角的差值,可利用双观测列计算出陀螺定向中误差
(5)
根据误差传播理论,综合地面和洞内观测成果,本次陀螺定向精度为
(6)
上式中,nΔ为地面常数边的测回数;n为定向边测定陀螺方位角的测回数。
(4)洞内陀螺定向成果检核
对洞内两条定向边X21-Z→X20-1Z和J35-Y→J34-Z进行对向观测,两条定向边的对向观测较差分别为-9″和4″,如表3所示。测量成果符合限差要求,定向成果可靠。
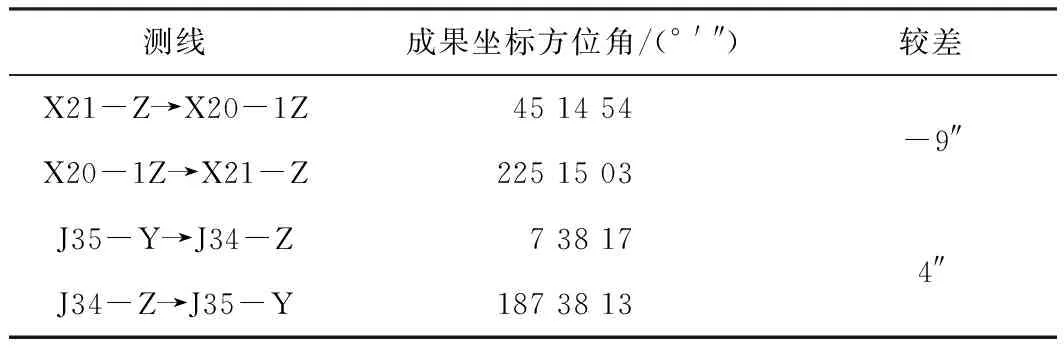
表3 洞内导线对向观测坐标方位角较差
上述计算通过仪器内置程序和人工计算两种手段进行,成果可相互验证。
3.3 定向成果分析
本次引汉济渭输水隧洞工程中地面常数边共进行了6个测回的定向测量,仪器常数一次测定中误差为3.2″,利用地面与洞内双观测列数据联合解算得陀螺定向中误差为2.5″,定向边方位误差为1.4″。最终陀螺测定导线X21-Z→X20-1Z和J35-Y→J34-Z与原坐标方位角相差分别为-4″和-15″,说明隧道洞内总体测量精度较高。原6号支洞内导线J35-Y→J34-Z测量存在一定的误差累积,可参考本次陀螺定向成果重新进行导线平差。
4 结论
首先阐述了隧道对高精度陀螺定向的需求,提出了陀螺定向成果质量的控制措施,分别从测量前的仪器检定、重复性精度观测、测量过程中的常数边对比、对向观测以及测量后的成果计算等方面进行检核。引汉济渭工程的应用实践证明:GAT磁悬浮陀螺全站仪能够有效控制导线测量的误差累积,并且适用于各类超长隧道的贯通测量。
