一种子阵级数字合成波束的远场简易校正方法
2018-11-28雷亚龙王海涛
董 锦,相 飞,雷亚龙,王海涛
(西安电子工程研究所,陕西 西安 710100)
数字波束形成技术是将传统相控阵雷达中的射频复加权移至数字基带上的波束形成技术[1],近年来广泛应用于雷达系统中,并将逐渐取代模拟波束形成技术[2]。数字波束形成需要处理并传输多路模拟射频信号,由于各个通道在实现过程中难以保证通道特性完全相同,因此存在通道间幅相不一致问题[3],会造成数字合成后的波束指向、主瓣宽度、副瓣电平、波束形状和天线增益等指标恶化。所以,在数字波束合成运算前,必须对系统的通道进行幅相校正,以保证数字合成后得到期望的波束[4]。
在常用的通道校正方法中,部分方法需要在设计之初就有复杂的硬件条件做支持,如基于行波馈源的有源相控阵天线校正方法,就需要包含由行波馈源、矩阵开关和校正通道等组成的校正网络系统[5];而另一部分方法则对测试条件要求苛刻,如需保证测试时参考信号相对于雷达系统各通道之间同幅同相,这种要求在实际应用中很难满足。上述实施条件均为数字波束合成时的通道校正增加了复杂度和难度。
针对上述问题,本文提出了一种基于远场条件的子阵级有源相控阵天线数字合成波束的简易校正方法,并给出了该方法中使用到的算法的具体实现步骤。通过试验证明了该方法能够完成对通道误差的校正,减轻通道误差对系统天线方向图的影响,且高效可靠、可操作性强,具有一定的工程应用价值。
1 通道不一致对数字波束合成的影响
本文讨论的多通道系统将天线划分为多个子阵,从天线方向图综合的角度来看,全阵方向图是子阵方向图的加权合成叠加。假定系统中存在N个接收通道,各子阵的方向图为Pn(θ,φ),其中θ、φ分别是方位角和俯仰角指向,n=1,…,N。阵列中各子阵的阵列流形可写为a=[1,ejφ2,ejφ3,…,ejφN],其中ejφn是第n通道相对第1个通道的波程差[6-8],和方向图可写成
(1)
当存在通道间幅相误差时,实际生成的阵列方向图为
(2)
其中,Δn为各通道引入的幅相误差。此时,在数字波束形成时,通道误差将引起天线方向图畸变以及天线性能指标恶化,从而影响雷达系统正常工作。为了校正通道幅相误差造成的问题,必须得到Δn并分别补偿各通道的误差。
仿真两个方位子阵组成的天线系统,接收通道幅相不一致对数字形成波束所带来的影响。天线频率34.6 GHz,半波长布阵,阵元间距5 mm,共96个阵元(左右半阵各48个),-30 dB泰勒幅度加权。
当天线两个子阵对应的接收通道幅相一致时,如图1所示,子阵天线方向图完全一致,数字域合成的全阵天线方向图和波束3 dB波束宽度为1.2°,主副瓣比约为30 dB,主瓣对称性好,差波束零深约-35 dB,差斜率大,主瓣对称性好,和差波束满足指标要求。此时,如图2所示,差波束减和波束的相位差曲线在波束法线指向处跳变,关于0°对称,相位差90°,满足系统单脉冲测角需求。

图1 通道间幅相一致时天线方向图
当接收通道相位相差90°时,如图3所示,尽管子阵天线方向图仍完全一致,但数字域合成的全阵天线方向图和差波束主瓣形状已明显异常,和差波束不满足指标要求。此时,如图4所示,差波束减和波束的相位差曲线在波束法线方向并未发生相位跳变,不满足单脉冲测角需要。

图2 通道间幅相一致时和差相位差曲线

图3 通道间相位差90°时天线方向图

图4 通道间相位差90°时和差相位差曲线
当接收通道幅度不一致,相差1.5倍(3.5 dB)时,如图5所示,子阵天线方向图已不相同,数字域合成的全阵天线方向图和波束主副瓣比为26 dB,差波束零深仅有10 dB,性能明显变差,不能满足指标要求。此时,如图6所示,差波束减和波束的相位差曲线在波束法线方向变化缓慢,直接影响单脉冲测角性能。

图5 通道间幅度差3.5 dB时天线方向图
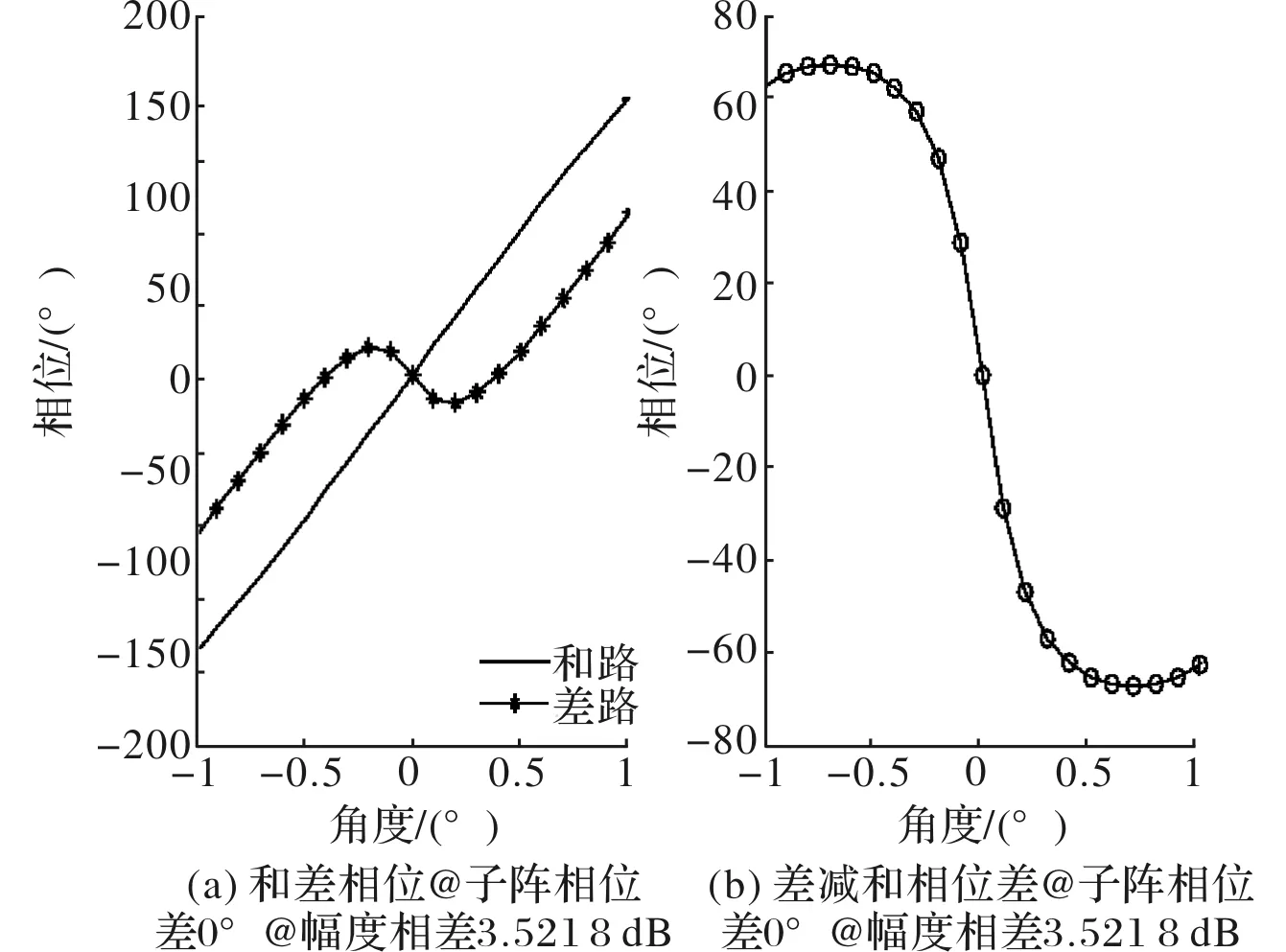
图6 通道间幅度差3.5 dB时和差相位差曲线
因此,接收通道幅相不一致会对数字域合成的天线方向图产生不利影响,使天线波束宽度、主副瓣比以及零深等主要指标恶化,对以单脉冲方式工作的雷达系统还会造成测角精度的严重恶化[9-10]。
2 通道校正算法
通道校正的基本原理是利用给定的校正参考信号,与每路需校正的信号进行比较,给出相应的幅相数据,通过多次迭代,实现通道的校正[10-14]。
在实际工作环境中,阵列天线每个接收通道都包括阵元和馈电线路、放大、滤波、射频下变频、中频接收处理以及I/Q支路和A/D变换的数字输出,任一环节的误差都会引起通道不一致[15-17],从而导致雷达天线指标的恶化。因此,在数字下变频后的视频域进行通道响应标定,能够覆盖整个通道所有可能的误差项。理论上,需在所有通道参考信号同幅同相的条件下完成上述过程。但在工程实现中,需要精确定标才能达到这种测试条件,这大大增加了测试难度。
本算法通过对方位和俯仰的两维空间解耦,克服上述约束条件,试图取得工程可实现且误差允许的满意结果。在测量获取的初始值和迭代步长下,考虑迭代过程是否收敛,并充分利用算法的收敛条件,在零点附近动态调整步长,加速收敛过程,从而提高算法效率。其中,算法的效率由算法执行的循环次数即算法所占用的时间来表征,算法最终达到的效果由最终数字形成的波束形状性能指标来表征。下面以四子阵系统为例,介绍算法的具体实现步骤:
(1)对方位和俯仰两维空间解耦,获取方位维初始校正系数。在俯仰空间有效范围(主瓣)内,认为方位维应具有副相一致性,测试各子阵方位和路方向图,分别获取每个子阵方向图接收幅度最强点处的复数值,以子阵1为参考,得到子阵2与子阵1的复数比值k21初,以子阵3为参考,得到子阵4与子阵3的复数比值k43初。k21初和k43初包含幅度校正值和初始相位校正值,需进一步寻找更合适的相位校正值;
(2)粗搜索逼近拐点。设置粗搜索迭代初始步长step21粗和step43粗,得到待验证校正系数k21粗搜和k43粗搜
(3)
以step21粗和step43粗步进迭代,直到当前指标优于上一次指标(以和波束主瓣3 dB宽度和差波束零深为性能指标评估依据),则认为此时已经到达拐点附近,暂停粗搜索;
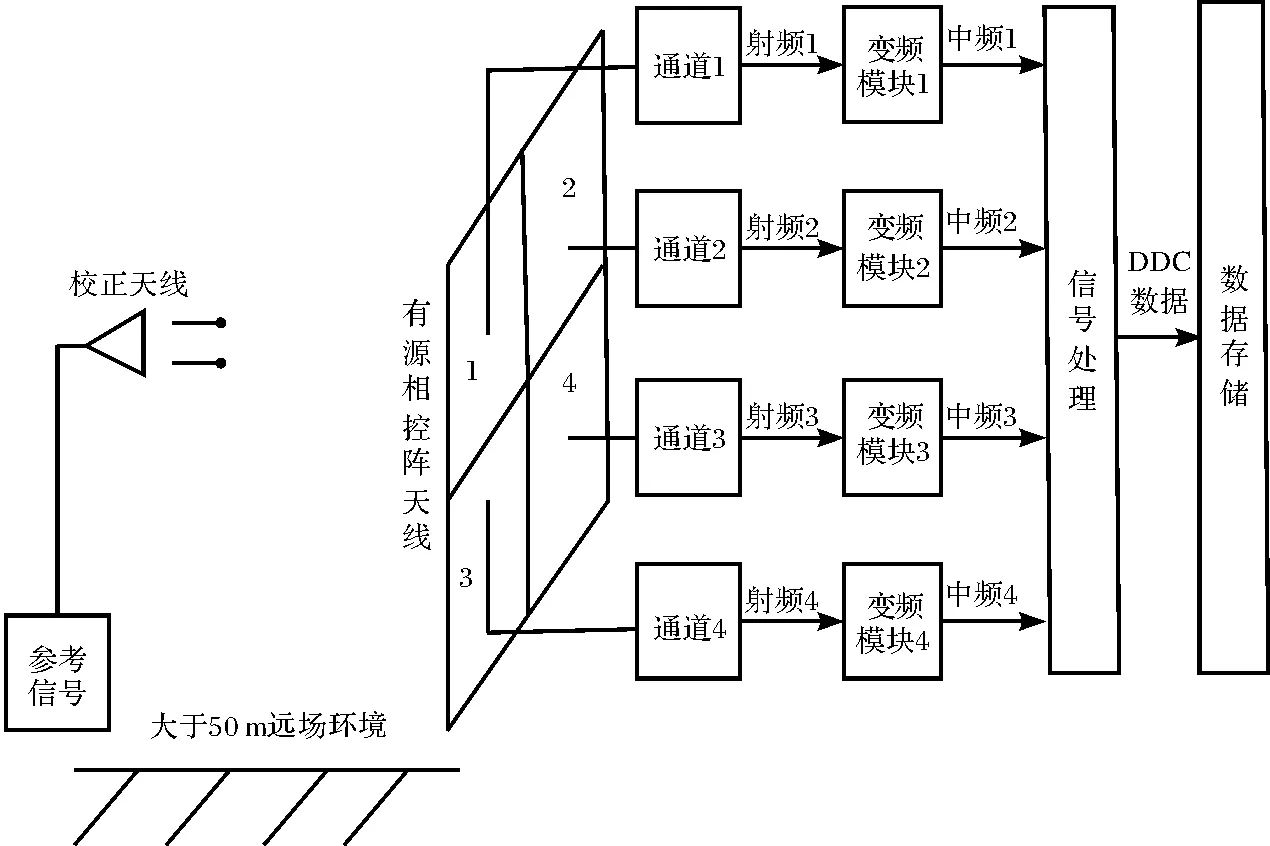
(3)动态调整步长,精搜索得到方位维校正系数。调整步长为step21精和step43精(step21精 (4)搜索迭代获取基于方位校正系数的俯仰校正系数。在步骤(3)已得到的方位校正系数的基础上,重复步骤(2)和步骤(3),完成俯仰维的幅相一致性校正,并得到最终俯仰校正系数k31精搜和k42精搜。需要注意的是,因方位维已在步骤(3)中校正,故此时得到的俯仰校正系数k31精搜和k42精搜应基本一致,差异不大; (5)计算得到最终校正系数。以子阵1为参考,通过以下公式得到校正系数k11终、k21终、k31终以及k41终。 (4) 将基于上述算法的通道校正方法工程实现应用在子阵级数字接收波束形成中,系统的有源相控阵天线由4个子阵组成,每个子阵对应一路接收通道,接收通道将接收到的射频参考信号通过对应的变频模块混频至中频,再分别进入信号处理单元完成数字下变频和采样,并将抽取后的I/Q数据存储至数据存储单元。通过处理该数据,分析并校正通道间的幅相不一致,在数字域完成和差波束形成。基于远场条件的试验场景图7所示。 图7 远场条件通道校正试验场景示意图 试验步骤如下: (1)在远场条件下(根据阵面尺寸计算远场距离应大于50 m)架设辐射源,设置参考信号为雷达工作频点上带频偏的点频连续波信号,控制雷达接收该信号,完成4个子阵的方向图测试,寻找满足算法的空间位置; (2)根据算法步骤得到各通道的校正系数; (3)将归一化和量化后的校正系数装订至信号处理单元,生成相应的通道均衡器; (4)复测校正后全阵数字合成的天线方向图。 通道校正前,4个子阵天线方向图和数字波束合成后的天线方向图分别如图8和图9所示。 图8 校正前子阵方位方向图 图9 校正前合成全阵方位方向图 由于通道间的幅相不一致,导致4个子阵的天线方向图各不相同,全阵合成的天线方向图为4个子阵方向图的矢量和,由上图可以看出,全阵天线方向图波束形状已明显异常。 分析校正后的数字合成的和差波束幅度关系,得到方位和俯仰天线方向图分别如图10和图11所示。 图10 校正后数字合成全阵方位和差方向图 图11 校正后数字合成全阵俯仰和差方向图 校正后天线和出厂时天线的指标对照结果如表1所示。由表中可以看出,校正后数字合成的和差天线方向图的波束宽度、主副瓣比以及零深都达到或接近出厂指标。受限于远场测试条件,这里仅对这几个指标做了测试和比对,但根据天线理论可知,校正后的天线特性正常,能够满足系统需要。 表1 校正后天线指标与出厂指标对照表 分析校正后数字合成的和差波束相位关系,得到方位差减和的相位差曲线和俯仰差减和的相位差曲线分别如图12 和图13 所示。 图12 校正后数字合成全阵方位和差相位差曲线 图13 校正后数字合成全阵俯仰和差相位差曲线 合成波束相位差曲线在波束指向处跳变且关于该点对称,能够满足系统单脉冲测角的需要。 本文提出了一种基于远场的子阵级接收数字波束合成的简易校正方法,并给出了具体的算法实现步骤。试验结果表明,该方法简单、高效,便于在外场开展,校正后的数字波束性能指标达到了系统指标要求,能够满足工程需要。3 试验分析







4 结束语
