基于改进PI-重复控制的数字逆变系统
2018-11-28贾日晶单鸿涛王士璋
贾日晶,单鸿涛,蒋 宇,王士璋
(上海工程技术大学 电子电气工程学院,上海 201620)
UPS等不间断电源的出现,为无法直接使用电网供电的用电设备提供了方便,现在常用到的逆变电源多是数字逆变电源。目前在数字逆变电源中常用的控制方法有重复控制和数字PI控制等。重复控制能够规避死区影响、消除接入非线性负载后导致的输出波形的周期性畸变,但其动态特性差。PI控制能够提高系统稳定性并且改善动态特性,但当负载为非线性时,使用PI控制跟踪特性不是很好。文献[1~2]中详细介绍了以上两种方法结合而成的双闭环控制结构,能够获得比使用单一控制算法更好的控制效果。然而传统PI控制虽然能够消除直流信号的稳态误差,但是无法对交流信号进行无静差跟踪。而比例-谐振(Proportional-Resonant,PR)控制则能够实现对交流信号的无静差跟踪。因此,本文结合以上两种算法的优点,提出改进后的PIR控制算法,并结合重复控制和PIR控制组成复合控制体系,用来控制数字逆变器。PIR-重复控制不仅可以满足系统稳定性的要求,而且具有动态响应快、跟踪特性好和输出波形畸变率低的优点。
1 逆变系统的建模与分析
1.1 逆变器的主电路拓扑
在逆变器中,通常使用全桥结构或半桥结构。半桥电路使用器件少、驱动简单、经济性好,但仅适用于小功率场合。而全桥电路在输出相同功率、承受相同电压时,流过逆变桥臂的电流仅是半桥电路的一半。因此,论文将选用单相全桥逆变系统作为研究对象,分析其电路结构模型。逆变系统由逆变桥、LC滤波器和负载R组成[3],如图1所示。

图1 单相全桥逆变系统模型
根据图1中的模型运用基尔霍夫电压定理和电流定理可得到如下方程[4]
(1)
(2)
根据式(1)和式(2)可得状态方程
(3)
(4)
记
(5)
设S为相应桥臂的开关函数,则S=1代表T1和T4导通,T2和T3关断;S=0代表T2和T3导通,T1和T4关断。因此,可得逆变桥输出电压ui
ui=Ed(2S-1)
(6)

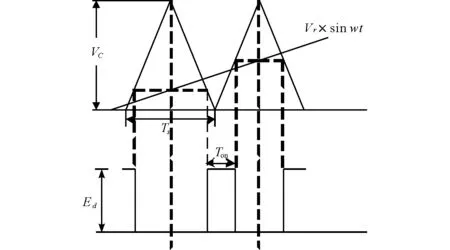
图2 单极性SPWM调制过程示意图
本文采用单极性SPWM脉冲调制,其原理如图2所示。其中,Vc为三角载波的幅值,Vr×sinωt是幅值为Vr的调制波,Ts为采样周期,Ton为开关管导通时间。根据图2中三角形几何关系可得
(7)
将式(7)代入式(5),可得到状态空间平均模型
(8)
2 基于改进PI-重复控制的复合控制设计
2.1 PIR双闭环设计
逆变系统所带负载具有不确定性,为了克服负载变化所引起的电压畸变,将电感电流引入控制系统构成双闭环PI控制[5]。PI控制器可以无静差跟踪直流信号,但电感电流与电容电压均是交流信号,在对交流信号跟踪时总有静差。而对某一频率信号实现无静差跟踪的充要条件是该控制系统的开环增益在此频率点为无限大。因此,为使50 Hz处增益变大,引入比例-谐振调节器(PR),它能够使谐振频率处的增益达到一个较高的点[6-8]。PR控制器的传递函数GPR(s)为
(9)
式中,KP是比例参数;KR是谐振参数;ω0是谐振频率。
虽然PR控制器在ω0处可以获得较大增益,但其带宽很小。实际的电感电流中包含基波附近次谐波,使得PR控制器并不稳定[9]。为了改善控制效果,提出改进后的PIR控制器,其传递函数GPIR(s)为:
(10)
式中,Ki是积分参数;ωc是截止频率,其余参数同上。

图3 PIR控制器伯德图
取KP=50,Ki=20,KR=1 000,ω0=314,ωc分别为5、10、25时,可得图3。从图3可以得出以下结论:随着截止频率ωc的增加,带宽也越来越宽。表明改进后的控制算法改善了频带特性,当频率出现偏差时,PIR控制器仍具有较好的跟踪能力。
根据式(8)可得到双闭环控制系统方框图如图4所示。

图4 双闭环PIR控制系统框图
双闭环控制系统传递函数G(s)为
(11)

2.2 重复控制器设计
重复控制的思想来自控制系统里的内膜原理。在逆变电源中,即使输出电压的偏差降低到零,系统内膜仍然可以进行周期性的控制,从而消除重复性的干扰[12]。
图6为重复控制的系统框图,其中P(z)是逆变桥模型;C(z)是补偿器,用于优化系统幅频特性;z-N为超前环节,用于抵消补偿器和控制对象的相位滞后;Q(z)为滤波器,为消除对象模型不精确的影响,使内膜成为一个积分环节。

图5 重复控制系统框图
根据重复控制系统框图可以得到输入输出关系为
(12)
根据控制理论z域中系统稳定的充要条件,只有离散特征方程的所有特征根都在z平面的单位圆内时,该系统才满足稳定,即
‖Q(z)-C(z)P(z)‖<1
(13)
设置滤波器Q(z)可以有效提高系统稳定性。一般取Q(z)=0.95,此时单位圆整体左移0.05,即使在高频时也不会破坏系统稳定的充要条件[13]。
补偿器C(z)一般使用形式:C(z)=kr×zkS(z),其中,kr是重复控制器增益,kr越小稳定裕度越大,S(z)的作用是消除控制对象的谐振峰。虽然使用二阶滤波器可以消除逆变器的谐振峰,但在逆变器的截止频率处会产生很大的负增益,从而使系统的谐波抑制能力降低。为了避免上述情况的发生,需要在系统中添加一种陷波滤波器,该滤波器可以使其幅频特性在逆变器截止频率附近产生明显的下降,并且之后的斜率立即减小[14-17]。
本文选取kr=1,zk=z6,使用的陷波滤波器为
(14)
二阶滤波器分别为
(15)
将所设计的Q(z)、C(z)代入到H(ejωT)=Q(ejωT)-C(ejωT)P(ejωT)中,误差收敛指数H(ejωT)的幅相曲线如图6所示,由稳定性分析可得系统稳定。

图6 误差收敛指数幅相曲线
3 仿真与实验
3.1 系统仿真验证
基于上述控制方案,使用Matlab/Simulink进行仿真。主要仿真参数如下:直流母线电压为Ed=540 V,开关频率10 kHz,滤波电感L=5 mH,滤波电容C=140 μF,整流性负载L1=1.5 mH,R=20 Ω,C1=470 μF。在双环控制中,电压外环参数:Kvp=50,Kvi=20,KvR=5。电流内环参数:Kip=20,Kii=10,KiR=3,ω0=314,ω0=942。
由图7和图8的对比中可以看出:重复-PI双闭环控制在0.015 s突加整流性负载和0.095 s突减整流性负载时输出电压波形畸变大;重复-PIR双闭环控制在0.015 s突加整流性负载时没有波形畸变,在0.095s突减整流性负载时波形略有畸变。图9重复-PI双闭环控制的输出电压THD为0.29%,图10重复-PIR双闭环控制的输出电压THD只有0.10%。

图7 重复-PI双闭环控制波形
图8 重复-PIR双闭环控制波形

图9 重复-PI双闭环控制THD

图10 重复-PIR双闭环控制THD
3.2 系统的实验验证
为了对所设计的数字逆变系统进行验证,搭建了数字逆变实验平台,系统主要包括以下几个部分:直流供电电源、集成智能功率IPM、滤波器、DSP控制器、AD采样电路、保护电路等。LC滤波器参数取L=3 mH,C=14.1 μF。DSP控制模块选用DSP320F2812,使用CCS3.3环境进行编程,产生SPWM波形,并对滤波后的电压进行采样,通过复合控制算法调节生成SPWM触发脉冲,使输出达到最终预期的电压波形。

图11 重复-PI双闭环控制突加阻性满载输出波形

图12 重复-PIR双闭环控制突加阻性满载输出波形
对比图11和图12可以看出:重复-PI双闭环控制算法在突加阻性满载后的逆变器输出电压有效值为211.38 V,频率为49.19 Hz,通过计算可得电压偏差率约为-3.92%,频率偏差为-0.81 Hz;重复-PIR双闭环控制算法在突加阻性满载后的逆变器输出电压有效值为219.49 V,频率为49.76 Hz,通过计算可得电压偏差率约为-0.23%,频率偏差为-0.24 Hz。
4 结束语
由仿真和实验结果分析可知,采用重复-PI双闭环控制逆变器时,当负载变动时输出电压波形会有畸变。而通过重复-PIR双闭环控制,使系统在突加突减负载情况下具有较好的稳定性和快速性。通过搭建的逆变器系统试验平台并对复合控制进行了实验验证,结果表明基于重复-PIR双闭环控制算法在实际的数字逆变系统中可行,且控制效果较好。
