船体后体形状对船舶操纵性的影响研究
2018-11-01刘小健张晨亮夏召丹王大建范佘明
刘小健 张晨亮 夏召丹 王大建 范佘明
(1.中国船舶及海洋工程设计研究院 喷水推进技术重点实验室 上海200011;2.中国船舶及海洋工程设计研究院 上海市船舶工程重点实验室 上海200011)
引 言
船舶设计过程中,型线优化非常重要,良好的线型能使综合性能优良,各项营运指标满足IMO的要求,既保证船舶的航行安全,又能使EEDI和EEOI等降到最低[1-2]。
当前,船舶在设计过程中非常注重各营运剖面的性能,由于操纵和耐波等性能评估软件非常耗时,难以在优化平台中发挥作用,目前以阻力、自航为主的优化还是占绝大多数。本文利用本单位具有的船舶设计得天独厚的优势,采用优化过程中间模型在其拖曳水池中进行操纵等性能的试验评估,为船舶型线优化提供支撑。
对于水面船舶,改善船舶操纵性的方法有增加舵面积、重心位置坐标前移、采用高效舵等。这些方法本质上没有改善船舶的线型,只是对其操纵面进行了修改。国内采用悬臂水池试验对单桨单舵和双桨双舵船的尾型进行了研究[3],国外则对U型尾和V型尾的操纵性进行了研究[4],但均未对船舶操纵性进行全面综合考察。本文将探索一种改变船舶后体形状提高船舶操纵性能的方法。
本文采用平面运动机构(PMM)进行某船F1A1以及F1A3两线型(图1)在设计吃水状态下的直航、斜航运动和摇首运动等试验,对两型船的阻力进行了分析,回归得到相关的水动力系数,分析尾型对船舶操纵水动力的影响,并通过数值模拟[5],分析两船的自由自航模操纵性能。从试验和计算结果来看,F1A3线型的阻力性能、航向纠偏能力稍差,但其回转性和应舵性比F1A1更好。

图1 F 1 A 1(黑线)和F 1 A 3(红线)尾部线型
1 船体主要参数
船体主要参数如表1所示。

表1 船体主要参数表
2 操纵水动力分析
2.1 模型安装与坐标定义
图2为坐标系统和安装示意图。坐标原点O取在模型中纵剖面、静水面及重心位置所在横剖面的交点处,Ox轴指向船头为正,Oy轴指向右舷为正,Oz轴指向船底为正。前后支杆均通过传感器与模型相连并对称于坐标原点O,传感器的水平连线与Ox轴重合。下页图3为模型安装情况。

图2 模型安装简图
2.2 F1A1与F1A3水动力比较
下页图4为模型阻力试验结果,F1A3的阻力比F1A1大1%~2%。斜拖试验等准静态试验所测力(Y)和力矩(N)均已无因次化,摇首运动试验等动态试验所测力和力矩在一个周期内的积分(Yin,Yout,Nin,Nout)也已无因次化。

图3 大振幅水平面平面运动机构(LAHPMM)试验
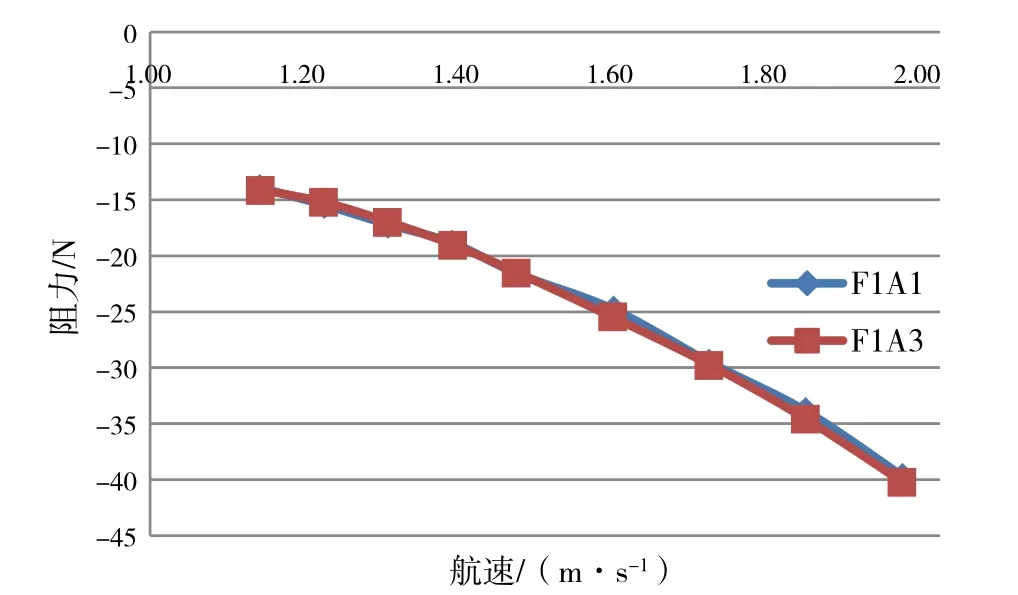
图4 模型阻力试验结果
图5为斜航试验无因次测试结果。

图5 斜航试验无因次测试结果
从图5可以得出,F1A1与F1A3比较,随漂角的增大,F1A1船体无因次化横向力小1.0%-10.0%左右, 而绕重心的摇首力矩小5.0%~15.0%。图6为纯摇首试验无因次测试结果。
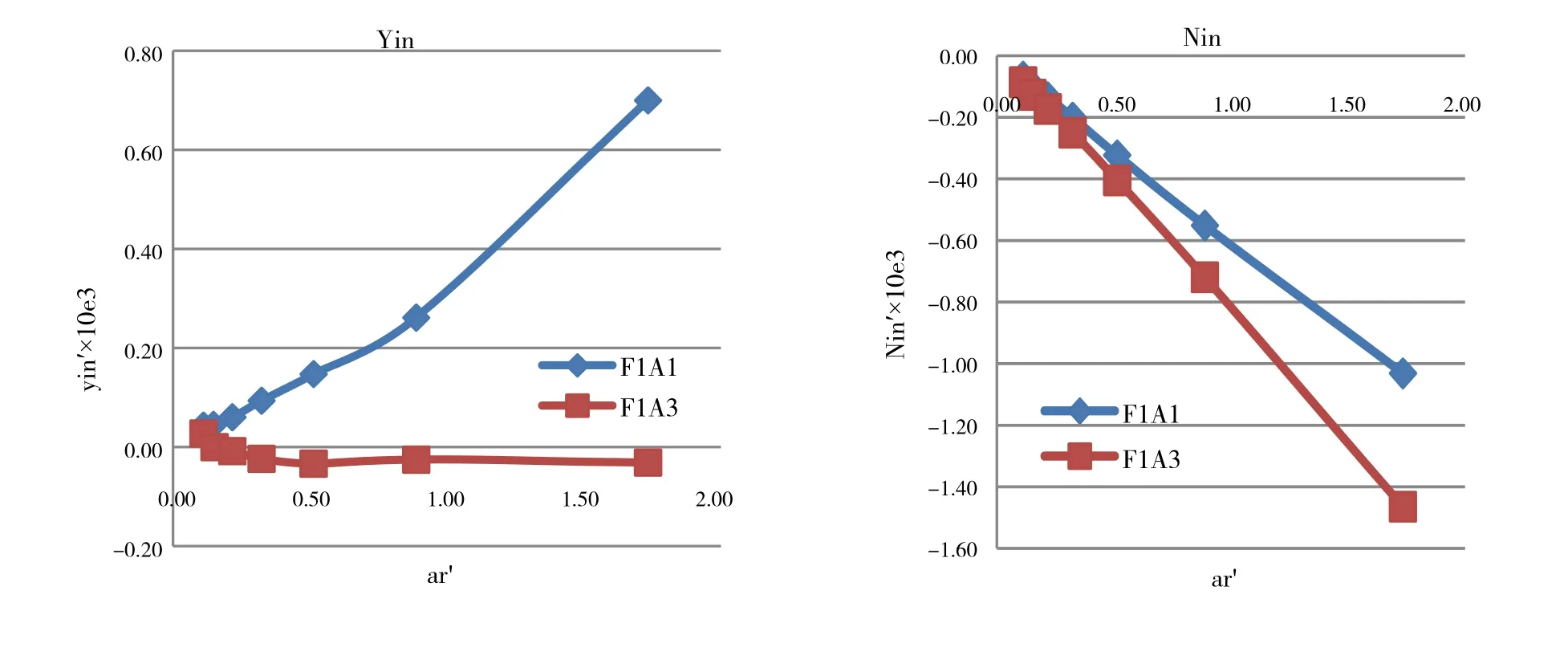
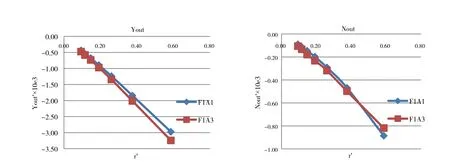
图6 纯摇首试验无因次测试结果
从图6可以得出:F1A1与F1A3比较,随频率的增大,F1A1船体横向力(一个周期内的积分)小9.0%左右, 而绕重心的摇首力矩(一个周期内的积分)小8.0%~15.0%。
锁相放大器的理论输出信号为直流信号,则数字锁相放大器中数字低通滤波器的截止频率越低,系统的信噪比越高。对于普通IIR滤波器,需要根据MTALAB仿真得到收敛的量化系数来调整程序和寄存器的位数,调节过程繁琐[6]。截止频率越低需要的滤波器阶数越高,加之算法复杂,导致PFGA资源占用过多,在增加系统功耗的同时增加了调节的复杂程度,因此,为了充分利用FPGA内部资源,需要针对不同的噪声带宽对其阶数进行调节。
根据上述曲线,回归得到两线型船的水动力系数如表2所示。
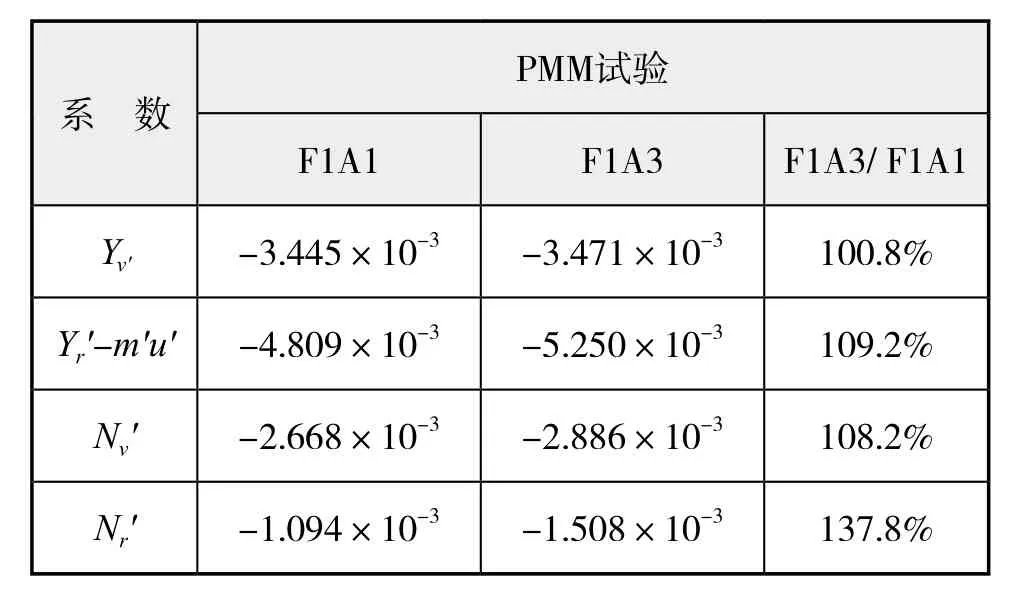
表2 斜航与摇首运动水动力系数
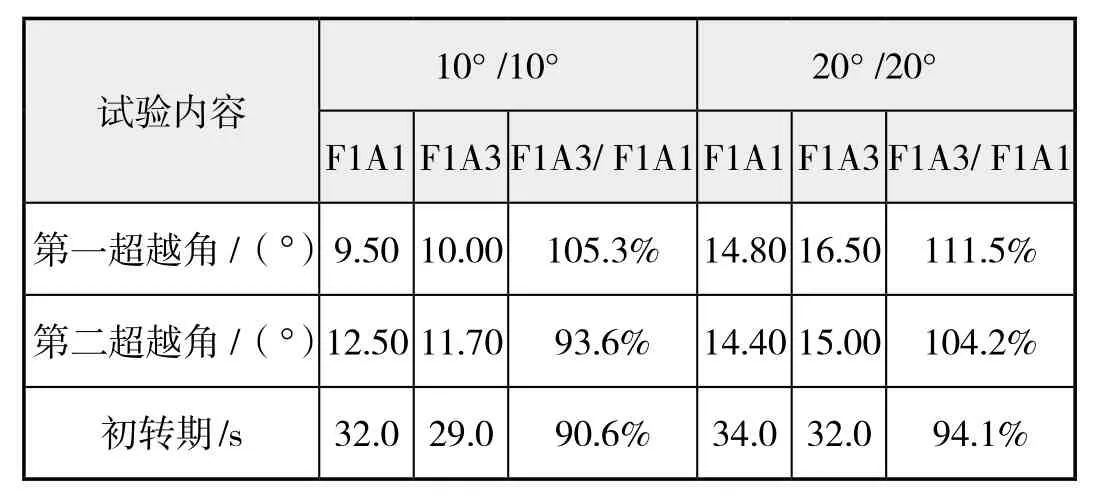
表4 z形试验模拟结果
3 操纵运动模拟分析
基于上述模型试验结果,模拟计算了该船30°回转试验、z形试验和螺线试验,得到如下结果,分别见表3、表4和表5,以及下页图7、图8和图9。

表3 回转试验模拟结果

表5 螺线试验模拟结果

图7 30°回转试验模拟

图8 z形试验模拟
从表3和图7可以看出:F1A3线型的纵距、横距、战术直径和回转直径分别为F1A1的82.8%、74.1%、74.5%和78.2%,F1A3比F1A1的回转性能更好。
从表4和图8可以看出:F1A3线型的10° z形试验的第一、第二超越角以及初转期分别为F1A1的105.3%、93.6%和90.6%;F1A3线型的20° z形试验的第一、第二超越角以及初转期分别为F1A1的111.5%、104.2%和94.1%。F1A3比F1A1的航向纠偏能力稍差,但是应舵性要好。
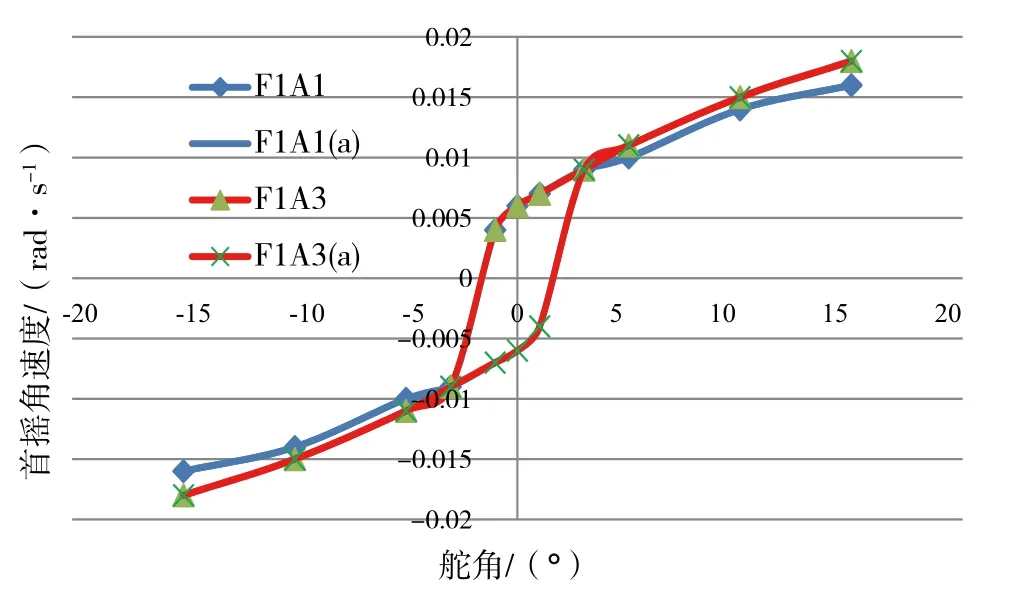
图9 螺旋试验模拟
从表5和图9可以看出:F1A3线型的不稳定环高、不稳定环宽以及0°舵角首摇角速度与F1A1相同;F1A3与F1A1的航向稳定性差异不大,但是F1A3随角度的增加,首摇角速度增加更快。
4 结 语
本文采用平面运动机构(PMM)进行某船F1A1以及F1A3两线型在设计吃水状态下的直航、斜航运动和摇首运动等试验,对两型船的阻力进行了分析,回归得到相关的水动力系数,分析后体形状对船舶操纵水动力的影响,并通过数值模拟,分析了两船的回转性和航向稳定性。从试验和计算结果来看,F1A3线型的阻力性能、航向纠偏能力稍差,但其回转性和应舵性比F1A1更好。F1A3类似隧道尾,民致压力中心前移,使船趋于不稳定。对于F1A1回转性本来就比较好的船型,将其后体形状变成V字型或增加分水踵是提高其航向稳定性的有效方法。
