风洞试验绳牵引并联支撑技术研究进展
2018-10-30王晓光林麒
王晓光,林麒
厦门大学 航空航天学院,厦门 361005
风洞试验是现代飞行器设计和研制过程中必不可少的环节。其中,模型支撑系统的设计与分析是风洞试验的核心技术,为获得全面、准确的气动参数,它要求既能够实现特定的飞行器模型静态、动态变化,又要降低支撑干扰,在满足风洞试验相关条件下具有较大的刚度,尽量减小系统变形和振动[1]。
随着空中对抗的日趋激烈,新型战斗机更加强调高机动性、高敏捷性,要求具备大迎角过失速机动、急速转弯等能力,要求风洞试验尽可能体现实际飞行状态,以探索复杂的气动/运动/控制耦合特性。传统的风洞试验模型支撑方式,如腹撑、尾撑等,由于其干扰和动态性能受限等原因,使得其在新型飞行器研制过程中的应用受到一定的限制。虽然目前国内外也已发展了风洞虚拟飞行试验技术[2]、风洞模型自由飞试验技术[3]等,如国内相关院所开展了针对导弹模型与先进飞行器模型的虚拟飞行试验平台建设[4-5];英国针对Hawk飞机模型研制了一种五自由度(Degree of Freedom, DOF)动态试验装置[6];德国DNW (German-Dutch Wind tunnels)低速风洞开发了一种刚性的六自由度运动模型支撑装置[7]。但从具有多功能风洞试验能力和降低研制成本等因素考虑,并结合当前发展迅速的智能化技术,仍然迫切需求研制新型智能风洞试验支撑机构,为揭示新的非定常、非线性气动特性,构建更加精准的气动模型,以及现代战斗机战术动作的发展提供重要的研究平台和技术手段[8]。
绳牵引并联支撑系统(Wire/cable-Driven Parallel Suspension System, WDPSS)是基于并联机器人技术的一种新型机构,具有可伸缩性,通过传动机构调整绳索的长度很容易实现较大的工作空间,同时具有结构简单、成本低、响应速度快、动态性好等优点,非常适用于机械加工、装卸运载、航空航天等领域,已成为近年来研究的热点[9-11]。在航空应用方面,采用绳牵引并联机构作为飞行器模型的支撑方式具有很大的创新性,为风洞试验提供了一种新型支撑技术。与传统的风洞试验支撑方式相比,绳牵引并联支撑不仅提高了系统刚度,能够有效减小对流场的干扰,提高试验结果的精准度,更能适应特殊构型模型的支撑,以及需要飞行器进行多姿态角耦合运动、大位移变化的特种试验,如大幅值振荡气动力测量、模型底部压力测量以及复杂动态试验等[1]。因此,发展绳牵引并联支撑系统是提高风洞试验模拟精准度、解决复杂模型支撑以及满足特殊试验要求的一种有效手段,具有重要的理论研究意义和工程应用价值。
本文首先从一般角度出发,详细论述绳系支撑在风洞试验中的研究现状,并进行归纳总结。其次,基于绳牵引并联机器人基本理论,对支撑系统进行分类,根据其相应的特点,重点阐述冗余约束和欠约束两类绳牵引并联支撑的关键技术问题。最后,总结分析绳牵引并联支撑技术的发展趋势。
1 风洞试验绳系支撑研究现状
为了减小传统支撑装置对风洞流场的干扰,绳系支撑方式被提出,且已广泛应用于风洞试验研究。本节将从国外、国内两个方面论述绳系支撑技术的发展,并进行相应的分析。
1.1 国外绳系支撑技术
1) 美 国
美国NASA兰利中心较早就提出将绳系支撑方式应用于跨声速风洞气动弹性试验[12-15],如图1[12]所示的双绳索悬挂系统,以研究飞行器模型的颤振和阵风响应等;并可通过系统辨识技术获取稳定性参数,如静导数、动导数等。
这种双绳索支撑系统具有“软”约束的特点,其稳定特性可等效于自由飞行状态。该支撑可以实现除轴向外的5个运动自由度,整体采用主绳索和辅助绳索,其中主绳索包括位于水平面和垂直面内的两根绳,分别用于调整纵向和横向运动;辅助绳索主要起安全保护作用,在正常试验时保持松弛状态。对于这种双绳索支撑系统,其纵向通道和横航向通道之间的运动是相互独立的,这也意味着两根主绳索也是独立控制。
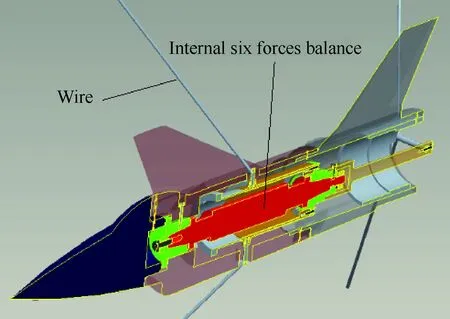
随后,美国GD公司研究了一种新型八绳牵引支撑方式(Vane Support System, VSS)[16],如图2所示,通过内置式天平进行气动力的测量。该结构中的绳索采用翼型截面以减小对流场的影响,通过同步转动两侧的转盘实现大范围的俯仰运动;通过调整绳索的长度,可以控制滚转和偏航运动。
美国空军阿诺德工程发展中心(Arnold Engineering Development Complex, AEDC)在研究弹体模型的虚拟飞行技术时采用了绳系结合轴承的支撑方式[17-20],以尽可能释放3个转动自由度。文献[17]首先提出采用八绳牵引方式,如图3(a)所示,八根绳索一端连接在导弹外部的环状套管上,另一端与地面支架相连,使导弹模型在俯仰、滚转方向可以自由转动,偏航方向可以进行有一定限制的运动。该系统在高速风洞(马赫数为0.4~0.6)
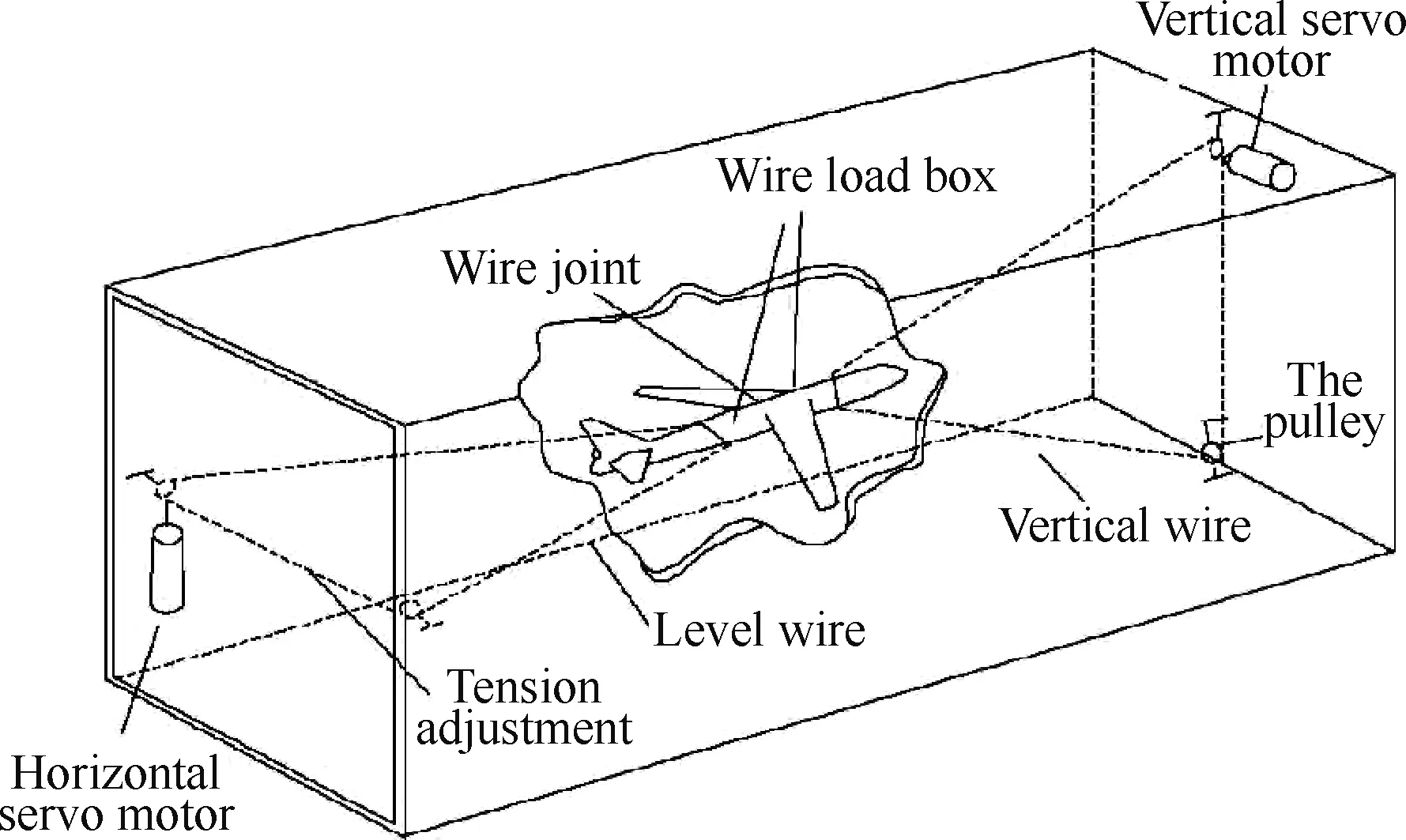
图1 双绳索支撑系统[12]Fig.1 Two-cable suspension system[12]
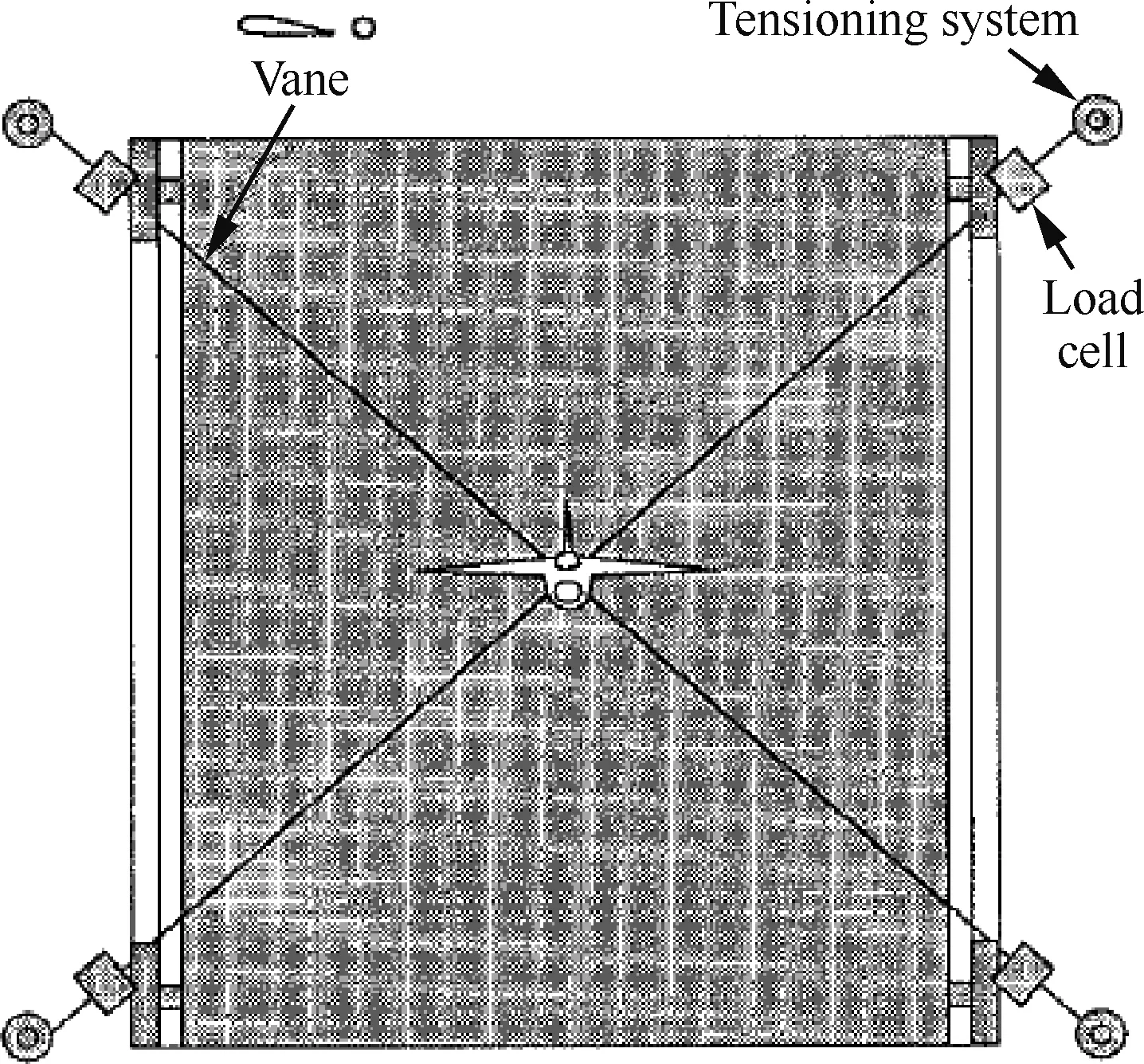
图2 虚拟飞行试验牵引支撑方式[16]Fig.2 Vane support system for virtual flight test[16]
中进行了试验验证。随后,为增大偏航运动的范围,文献[18]提出了三轴承与六绳牵引方式,如图3(b) 所示。为进一步减小支撑对流场的干扰,文献[20]又提出了改进型的六绳牵引方式,如图3(c) 所示,弹体模型采取分段形式,通过环组件进行连接。其中,环组件包括一对滚动轴承和俯仰轴承,以实现自由运动;而通过对绳长的主动控制,可以实现偏航运动。该系统同样在高速风洞中得到了验证。
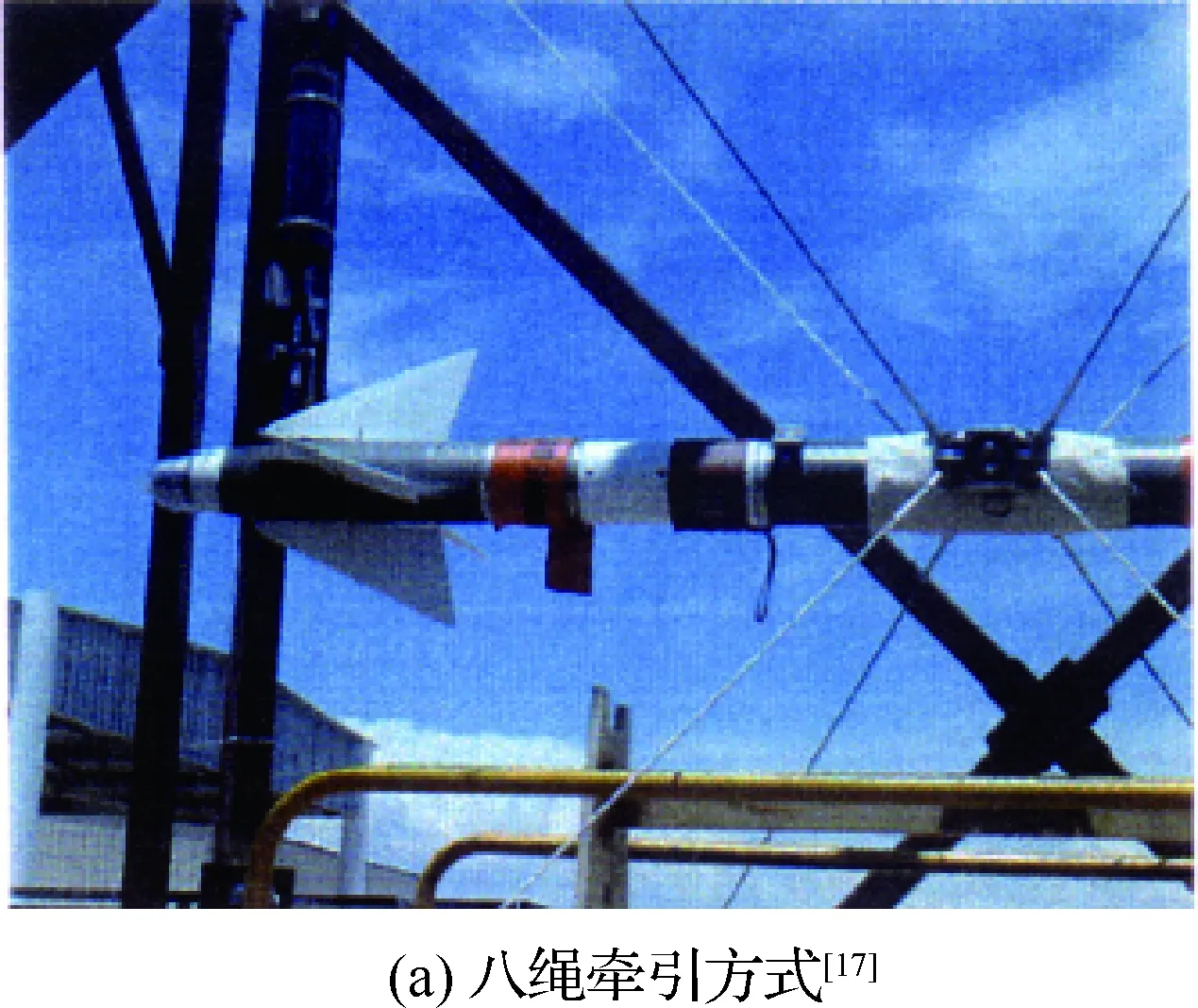
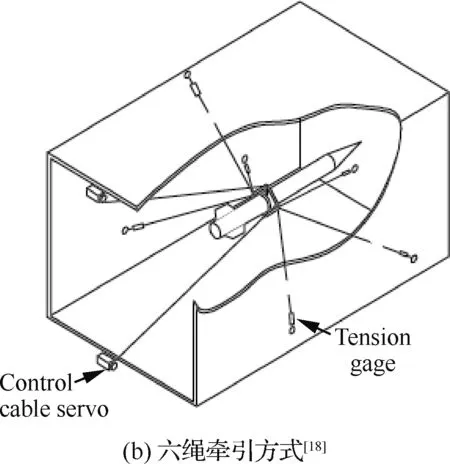
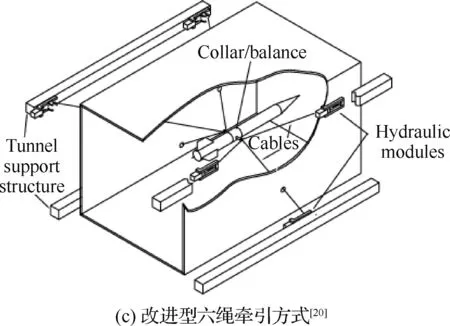
图3 虚拟飞行试验弹体模型绳牵引方式Fig.3 Wire suspension system for virtual flight test projectile model
最近,美国乔治亚理工大学Lambert课题组针对一个小尺寸、轻质量的轴对称钝体模型(直径为9 cm、长为16.5 cm、质量为0.53 kg),提出采用一种八绳牵引支撑系统(见图4[21]),并通过粒子图像测速(PIV)、热线仪以及位姿捕获系统进行了流场综合分析,重点研究了低速来流下(40 m/s) 模型运动与尾流动力学相互耦合的非定常流动机理[21-23]。该支撑系统虽然可以通过调整绳长实现模型的六自由度运动,但其运动空间较小,且只是采用运动学方法进行轨迹控制,并未基于并联机器人理论考虑动力学因素的影响。
文献[24]针对一种大尺寸高超声速模型构建了一套“软式”支撑系统,如图5所示,即采用尾撑以及4根钢索前后分布于机身的方式,应用于X-51高超声速模型的气动力测量试验中,得到了模型的升阻力。同样,在导弹多级分离试验中,如图6 所示,分别对不同级采用软式弹性支撑方式,与气动力和推进力相比,支撑引起的模型附加力相对较小,因此可视为自由飞行状态,与其他支撑方式相比具有一定的优势。
2) 俄罗斯
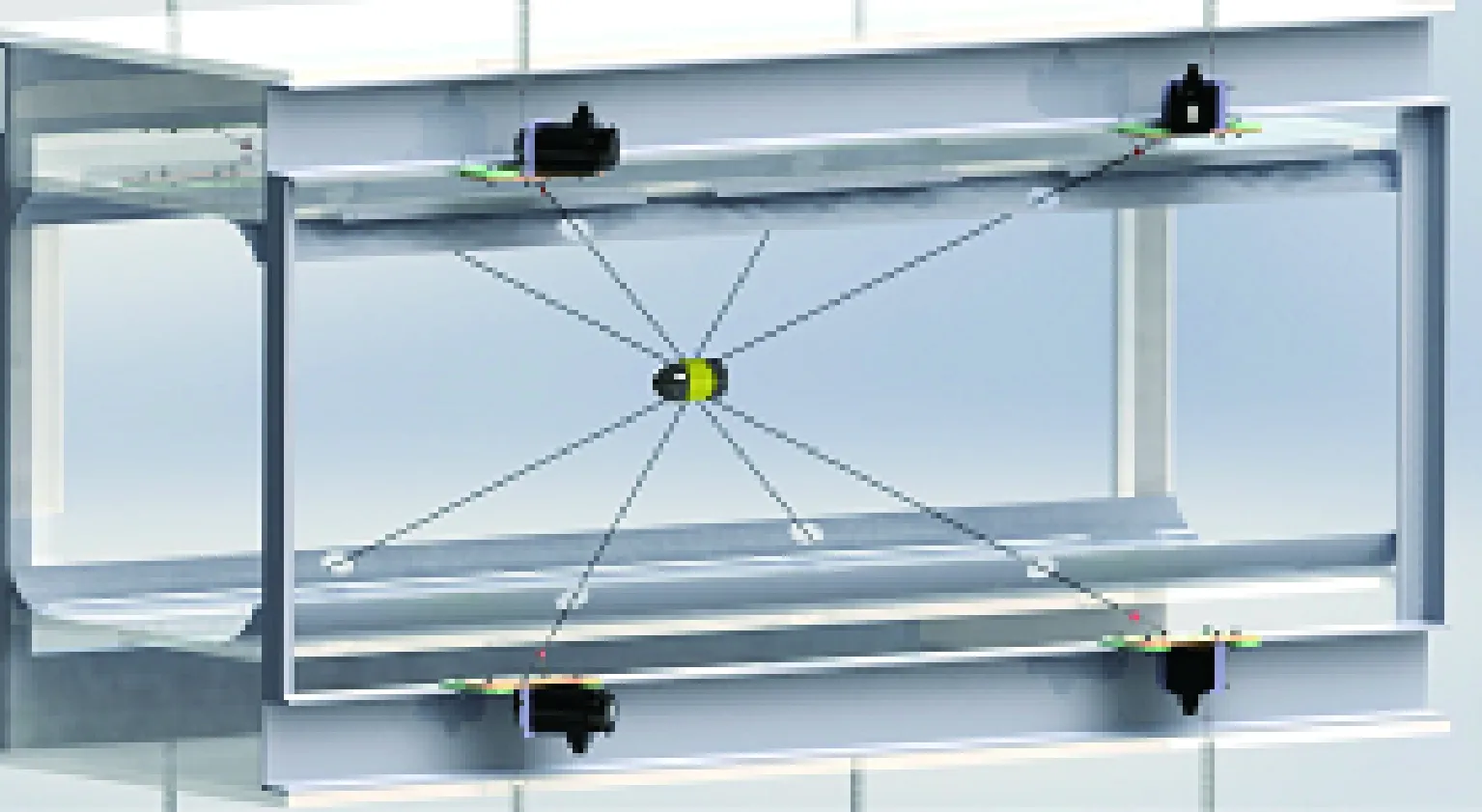
图4 八绳牵引钝体模型[21]Fig.4 A bluff body model supported by eight wires driven traverse[21]
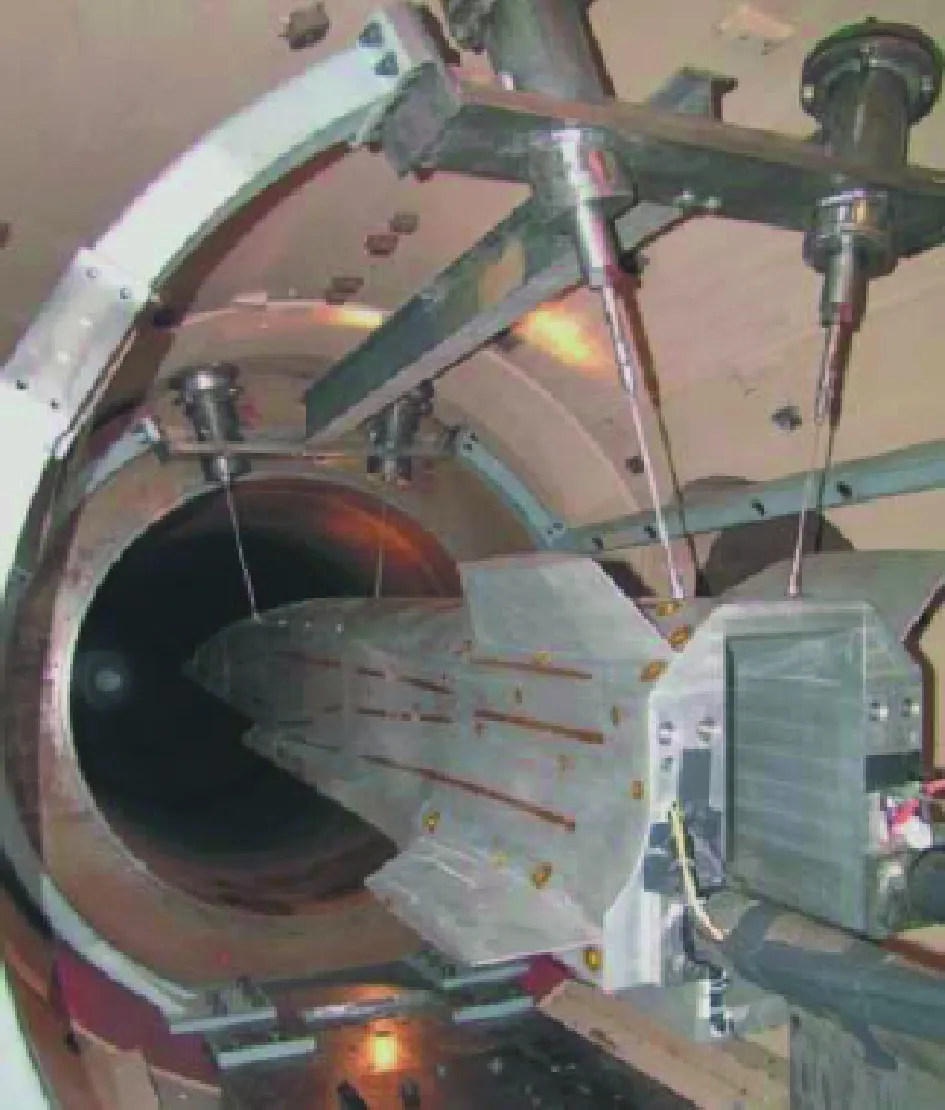
图5 X-51模型“软式”支撑方式[24]Fig.5 Soft suspension method for X-51 model[24]
俄罗斯中央流体研究院(TsAGI)针对不同风洞以及试验的特点,广泛采用了绳系支撑方式[25],但研究成果较少见于文献。其中比较典型的为应用于T102低速风洞中的绳系支撑方式(见图7(a)),以及T106与T128亚跨超风洞中的条带支撑方式(见图7(b));其新型MC-21民用飞机模型也采用绳系支撑方式在亚声速风洞中进行了全模颤振试验(见图7(c))。
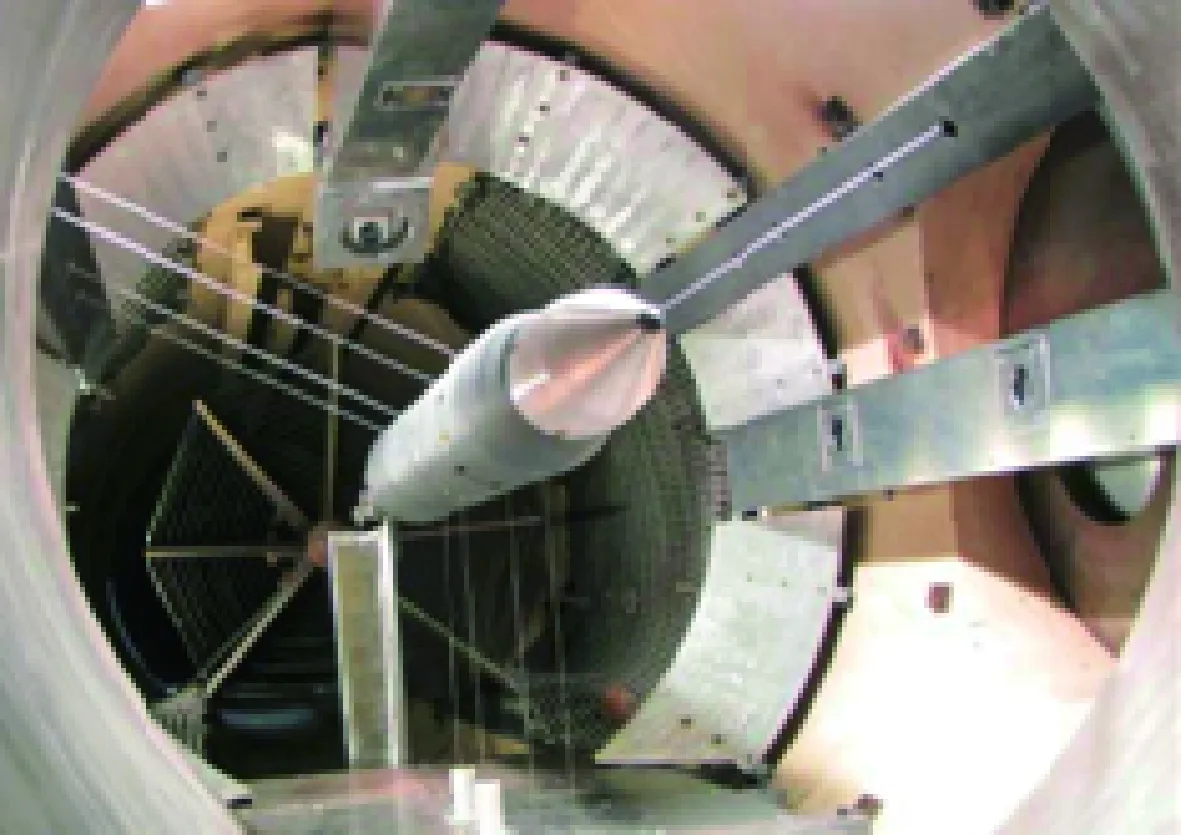
图6 导弹两级分离试验“软式”支撑方式[24]Fig.6 Soft suspension method for missile stage separation test[24]
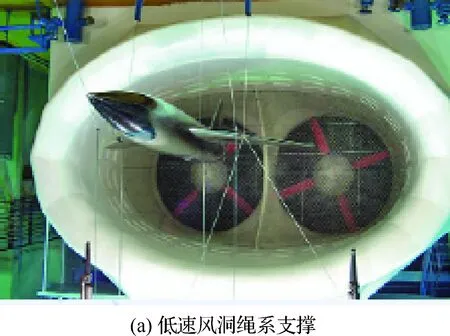

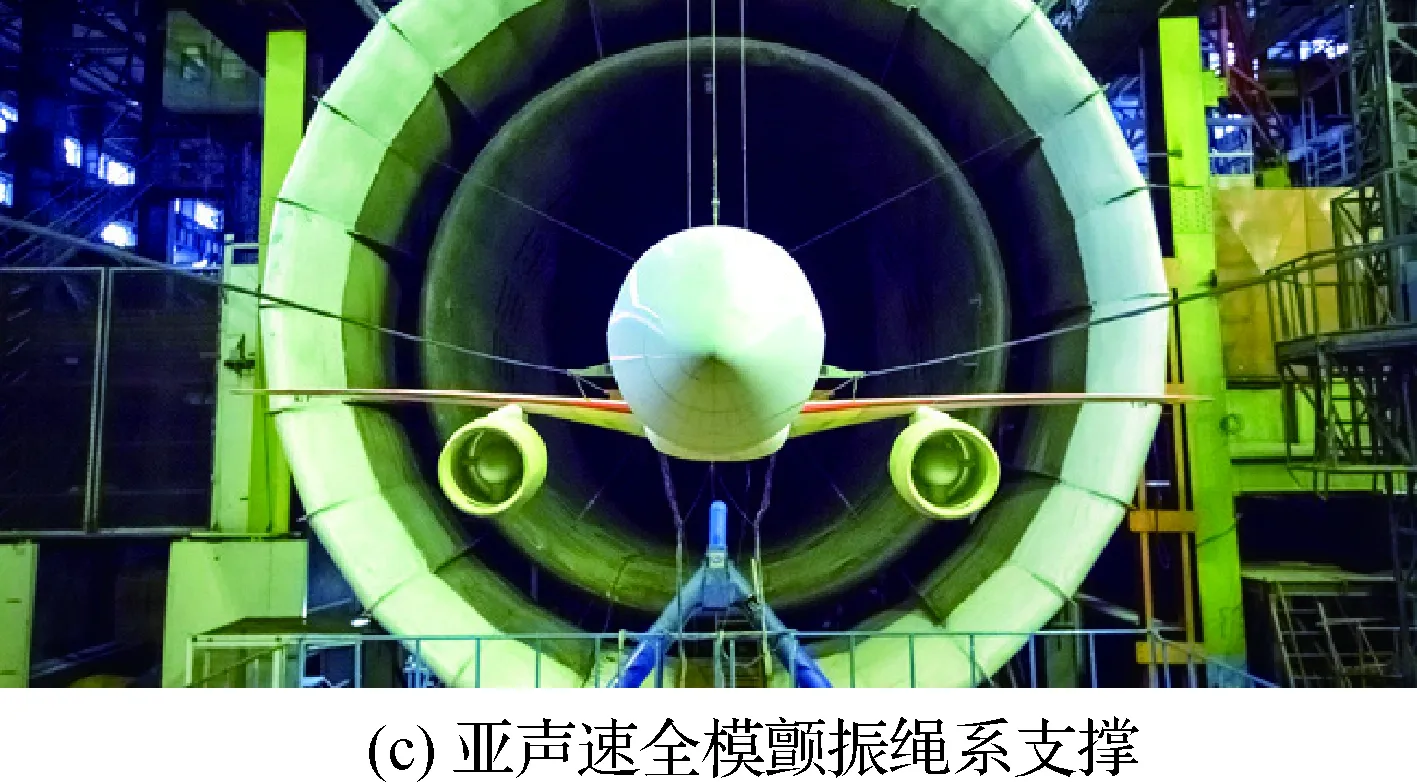
图7 TsAGI系列风洞绳系支撑方式Fig.7 Wire suspension system in TsAGI wind tunnels
3) 法 国
法国宇航研究局(ONERA)首次提出将绳牵引并联机器人技术应用于风洞试验,并通过建立低速风洞绳牵引并联支撑系统(SACSO)开展试验研究[26-28]。图8为用于立式风洞试验的绳牵引并联支撑示意图,它采用9根牵引绳实现六自由度控制,属于冗余约束系统。该项目研究已开展多年,并明确提出了3种控制方式,即纯位置控制实现六自由度强迫运动、纯力控制实现六自由度自由运动、力/位混合控制实现强迫+自由运动。
4) 德 国
德国Fraunhofer IPA研究所与杜伊斯堡-埃森大学等对绳牵引并联机器人技术进行了广泛深入的研究,其中后者针对船体模型的风洞试验,设计了8根绳索支撑方式。但考虑到试验模型的尺寸和重量,他们对其进行了改进[29],采用固定长度的钢索,结合线性驱动器与滑轨系统,用于模型的支撑,如图9所示,以测量船体周围的速度和压力分布等。该项目将针对重量约100 kg的船舶模型,要求能够实现振幅为0.5 m、频率为0.5 Hz的位置运动,以及2.5 Hz的角度运动[30]。目前项目还处于系统优化设计阶段,为试验测试做准备。
图8 立式风洞绳牵引并联支撑[28]Fig.8 Vertical wind tunnel wire-driven parallel suspension[28]
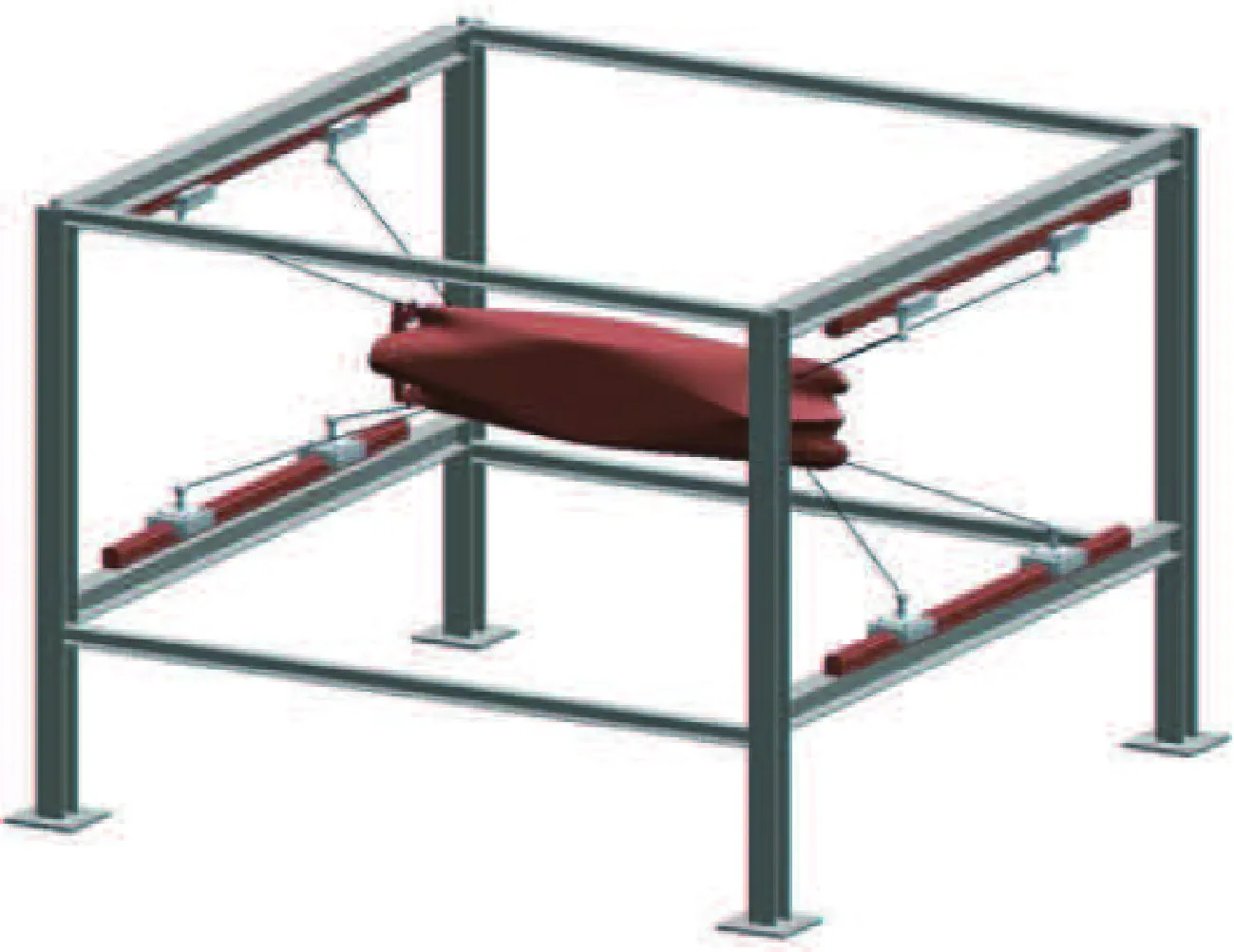
图9 绳索并联牵引船体模型[30]Fig.9 Cable-driven parallel suspension for ship model[30]
1.2 国内绳系支撑技术
笔者所在的厦门大学课题组针对绳牵引并联支撑技术在风洞试验中的应用,开展了多年的研究[31-35]。分别采用气动外形简单的非标准试验模型与标准动态模型(简称SDM标模),通过逐步升级测量系统与多轴运动控制系统,先后建立了3代原理样机,并在低速开口式风洞中进行了试验验证(见图10)。
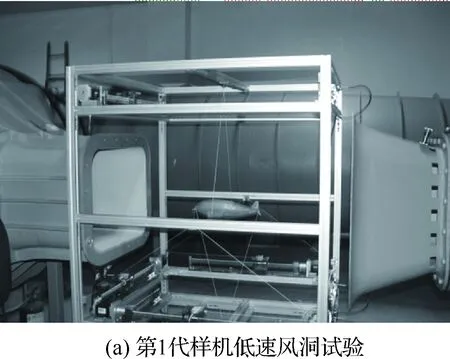
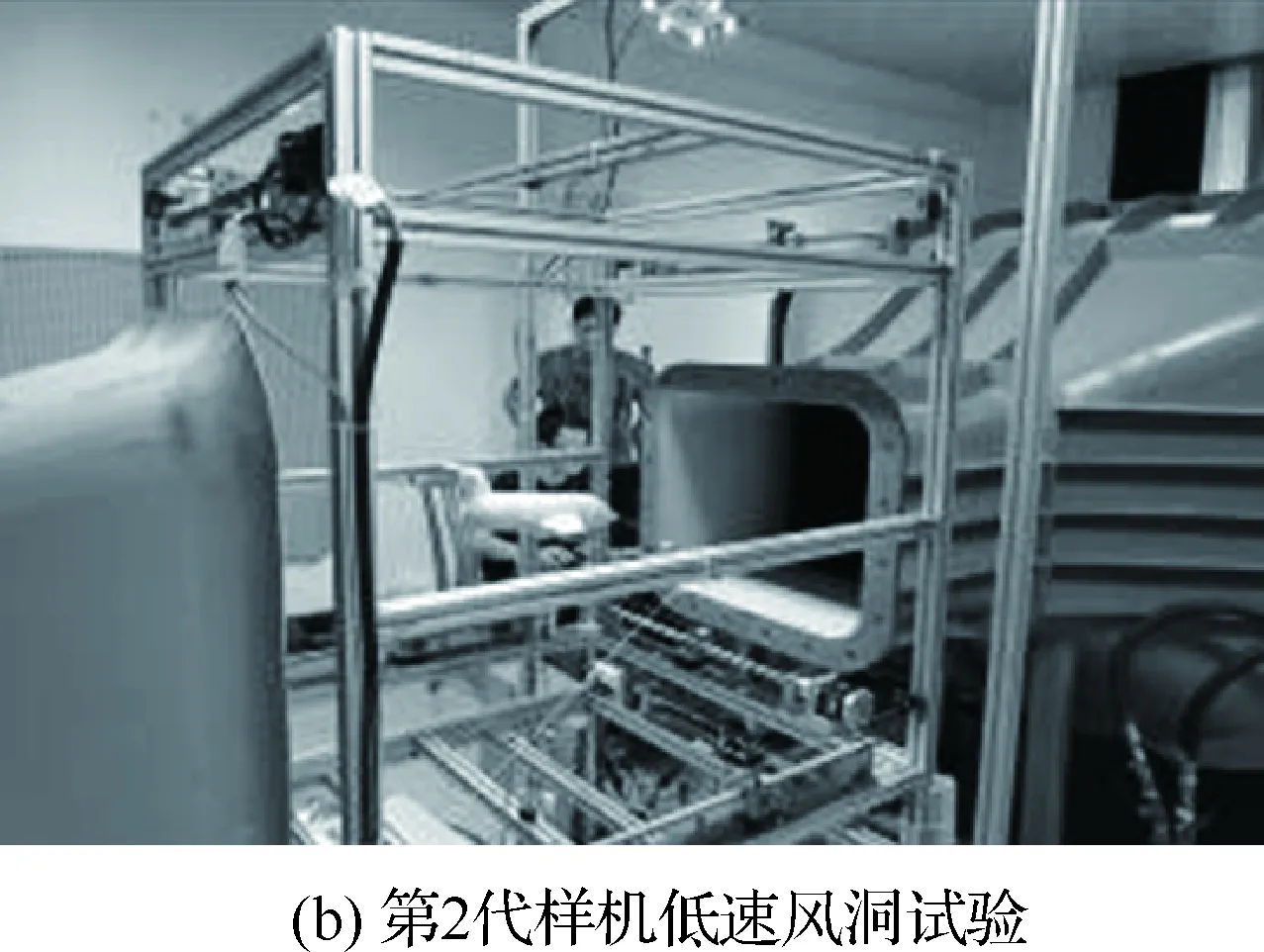
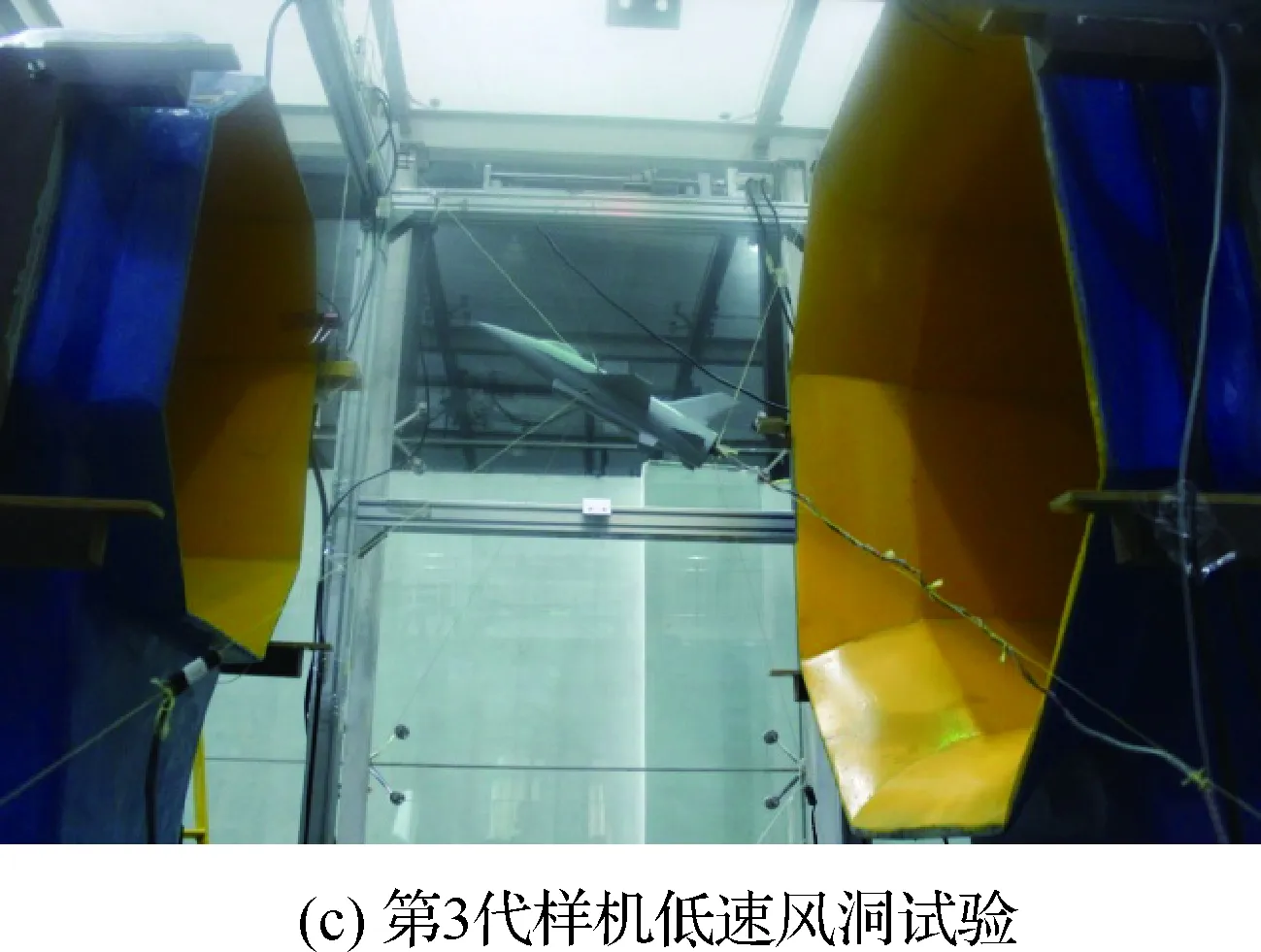
图10 风洞试验绳牵引并联支撑系统Fig.10 Wire-driven parallel suspension system in wind tunnel tests

图11 六自由度冗余约束原理样机Fig.11 Six-DOF redundant constraint prototype
针对SDM标模所构建的第3代原理样机,如图11所示,采用八绳牵引的六自由度冗余约束并联支撑技术。该支撑系统具体包括机械传动子系统,采用八绳布置方式,通过万向滑轮,分别连接飞行器模型与电机驱动端;运动控制子系统,采用伺服电机、多轴运动控制卡和伺服驱动器,基于并联机器人技术的鲁棒控制方法,实现对期望轨迹的高精度跟踪;模型位姿测量子系统,采用相机、陀螺仪和加速度计等多种传感器,通过数据融合,实现对模型运动轨迹的高精度动态测量;绳拉力和气动力测量子系统,对试验模型设计了内式六分量测力天平,以实现对气动力的实时监测。基于刚度与运动空间的联合优化,该绳牵引并联支撑系统可以实现较大范围的位置运动和角度运动。
课题组通过在低速风洞中进行试验验证,实现了常规静态测力试验、动导数试验、非定常振荡试验,如大幅值俯仰振荡、大迎角下的偏航与滚转耦合振荡、六自由度运动等,以及大迎角“眼镜蛇”(Cobra)机动等典型动态试验,详细成果见3.2节。
除上述绳牵引并联支撑在低速风洞中的研究外,文献[36]以大尺寸高超声速飞行器X-51A模型为例,通过结构设计,详细分析了绳牵引并联支撑系统的稳定性,即在冲击力作用下模型质心的位移以及绳系拉力的变化;进一步从理论上探讨了通过绳拉力解算气动力的方法,并给出了灵敏度分析,以及对支撑干扰进行了初步研究。文献[37]以10°尖锥标准模型为例,数值分析了支撑系统的稳定性和气动干扰特性,并与文献试验数据对比,在小迎角情况下,绳系支撑引起的气动干扰相对误差较小,但会随迎角的增大而增加。此外,对弯刀支撑和绳牵引并联支撑进行了模态分析,对比了两种支撑的固有频率。结果显示绳系支撑固有频率较高,系统刚度较大。上述理论研究成果可为绳牵引并联支撑技术在超声速风洞中的应用提供一定的技术支持。
中国空气动力研究与发展中心(CARDC)也对绳系支撑方式进行了广泛研究,其中多用张线支撑系统(Wire Suspension System, WSS)进行描述。
1) 大迎角张线支撑系统
CARDC低速空气动力研究所研制了一套用于3.2 m亚声速风洞进行大迎角试验的张线式支撑系统(见图12)[38],通过试验段两侧的张线悬挂架实现对模型迎角的调整,但其采用的张线组件由两部分组成,靠近模型内侧段为直径5 mm的钢杆,外侧段为直径20 mm的钢管。
2) 条带悬挂内式支撑系统

图12 大迎角张线支撑系统[38]Fig.12 Wire suspension system of large angle of attack[38]
图13 条带悬挂支撑系统试验图[39]Fig.13 Test photo of vane cable suspension system[39]
为解决传统支撑方式存在的模型尾部失真、模型易振动等不足,文献[39-41]研制了条带悬挂内式支撑系统,如图13所示,系统采用静带与动带相结合的方式,其中动带实现俯仰方向迎角的调整,静带起到增强刚度的作用。支撑系统以标模为例,在2.4 m跨声速风洞中进行了试验验证。结果表明条带悬挂内式支撑试验运行平稳,试验重复性与精准度均良好。但该系统主要实现迎角控制,动态特性受到一定限制。
3) 悬浮支撑系统
CARDC高速空气动力研究所研制了悬浮支撑系统(见图14)[42-44],将其应用于FL-26暂冲式跨声速风洞中。该系统包括两根水平方向的主绳索与纵向穿过机翼根部的两根辅助绳索,具有除轴向外的5个运动自由度,其中水平的主绳索系统控制纵向俯仰通道,竖直的辅助绳索系统控制横向通道。
中国航天空气动力研究院针对弹体模型,在低速风洞中研制了一套虚拟飞行装置,设计了张线与组合滚转轴承支撑方式(见图15)[45]。模型在质心位置被8根张线悬挂在风洞中。上下4根张线各连接于同一点,使模型可绕过重心的纵向轴做偏航运动。
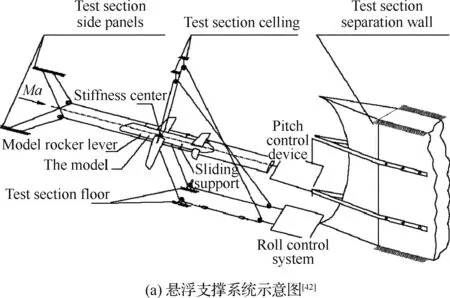
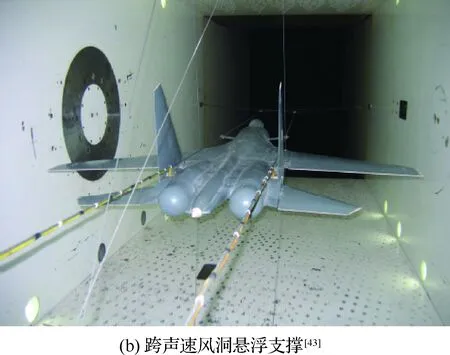
图14 悬浮支撑系统原理Fig.14 Principle of floating suspension system
航空工业空气动力研究院针对民机及大型运输机等特种布局飞机,开展了高速风洞张线支撑系统的研制[46],开始也采用两侧壁转窗形式,张线与转窗内的挂架相连。但为满足支撑的强度与刚度等要求,以及减小对机翼和发动机短舱的气动干扰,对原有张线支撑进行了改进,如图16所示,采用上下对称的两个框架,通过内啮合齿轮带动框架侧板上的弧形导轨转动,经由张线实现对模型角度的调整。
图15 模型悬挂于风洞中[45]Fig.15 Model suspended in wind tunnel[45]
图16 FL-2高速风洞张线支撑方式[46]Fig.16 Wire suspension system in FL-2 high speed wind tunnel[46]
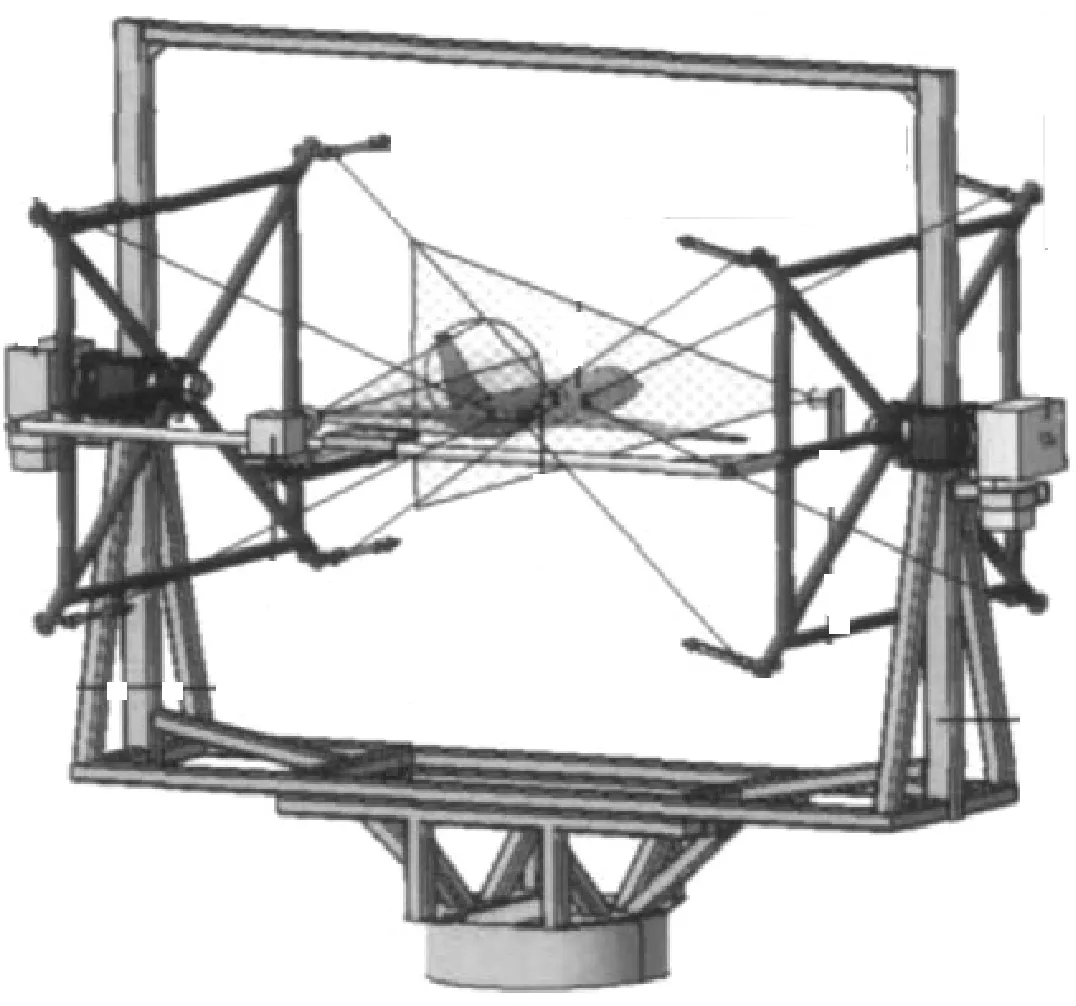
图17 D4风洞张线支撑机构[47]Fig.17 Wire suspension mechanism in D4 wind tunnel[47]
北京航空航天大学在D4低速风洞中同样发展了一套张线支撑系统(见图17)[47],8根张线与机构两侧旋转架相连。通过同步驱动位于机构两侧的两台步进电机,以实现对试验模型迎角的控制。
中国兵器工业研究所针对弹体模型,研究了张线支撑在高速风洞中的气动力影响规律,以及张线支撑在高速风洞应用的可行性[48],如图18所示。主要给出了弹箭模型高速风洞张线支撑总体研究方案和模拟试验方案,并进行了数值方法及风洞试验验证。结果表明,弹箭模型高速风洞张线支撑干扰试验方案可行,但张线支撑干扰较大,需要进一步优化改进。

图18 张线支撑弹箭模型示意图[48]Fig.18 Sketch of wire suspension for missile model[48]
综上所述,绳系支撑方式已被广泛应用于风洞试验,并在低速和高速风洞中得到了验证。但值得注意的是,虽然多数绳系支撑机构与绳牵引并联支撑方式有关,如张线支撑机构,但它们之间仍有明显区别。从机构学角度来看,张线支撑系统并非机器人机构形式,在几何建模、运动学、动力学分析与控制方面,都与绳牵引并联机构不同,无法实现多自由度运动控制,只能进行有限的动态试验。
随着机器人技术与人工智能技术的快速发展,开展基于绳牵引并联机器人的智能支撑技术研究,可为风洞构建新型的模型智能支撑系统提供理论依据和支持。因此,下文将重点阐述绳牵引并联支撑技术。
2 绳牵引并联支撑系统分类与特点
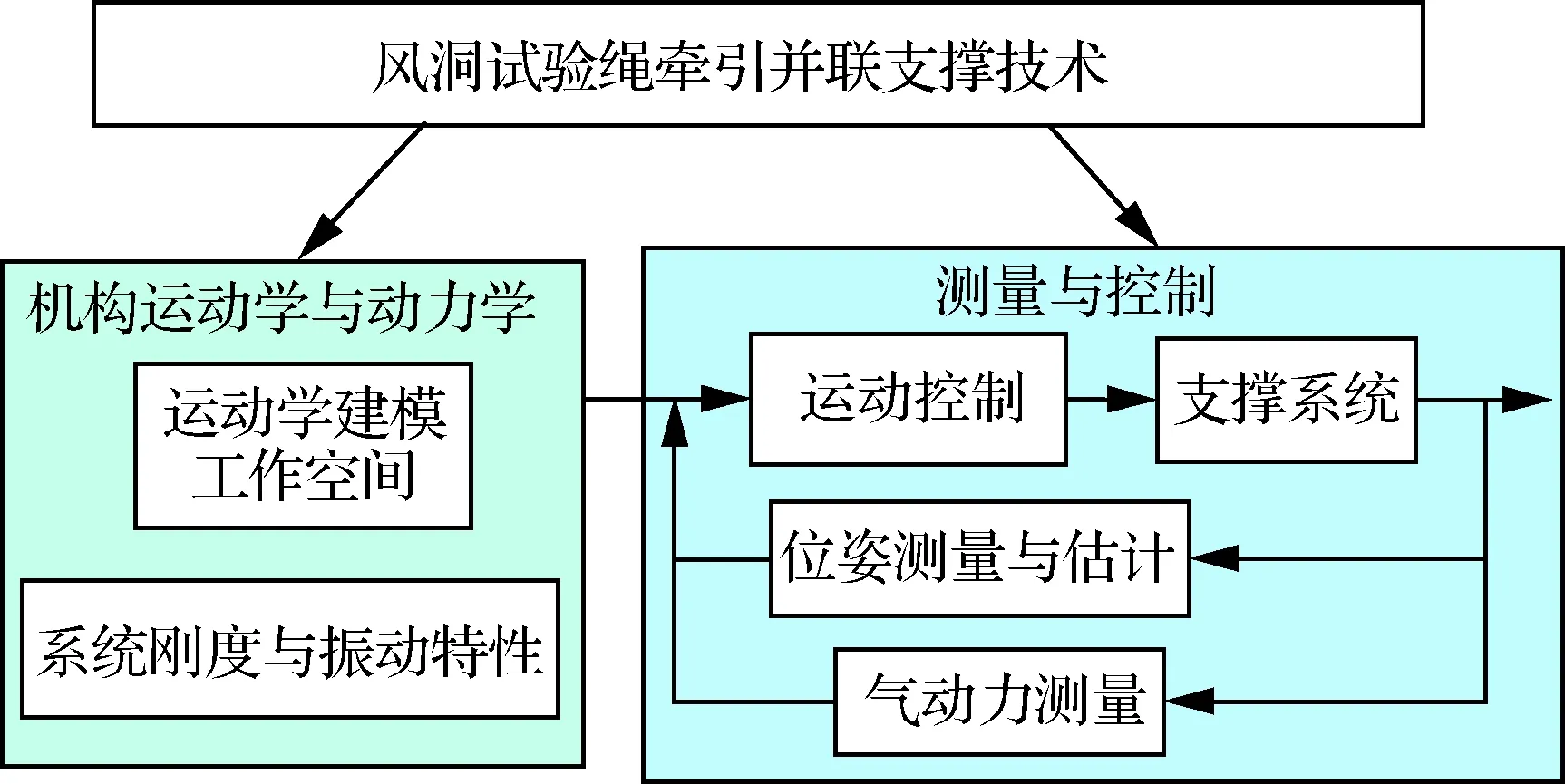
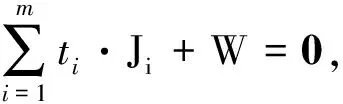
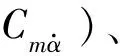
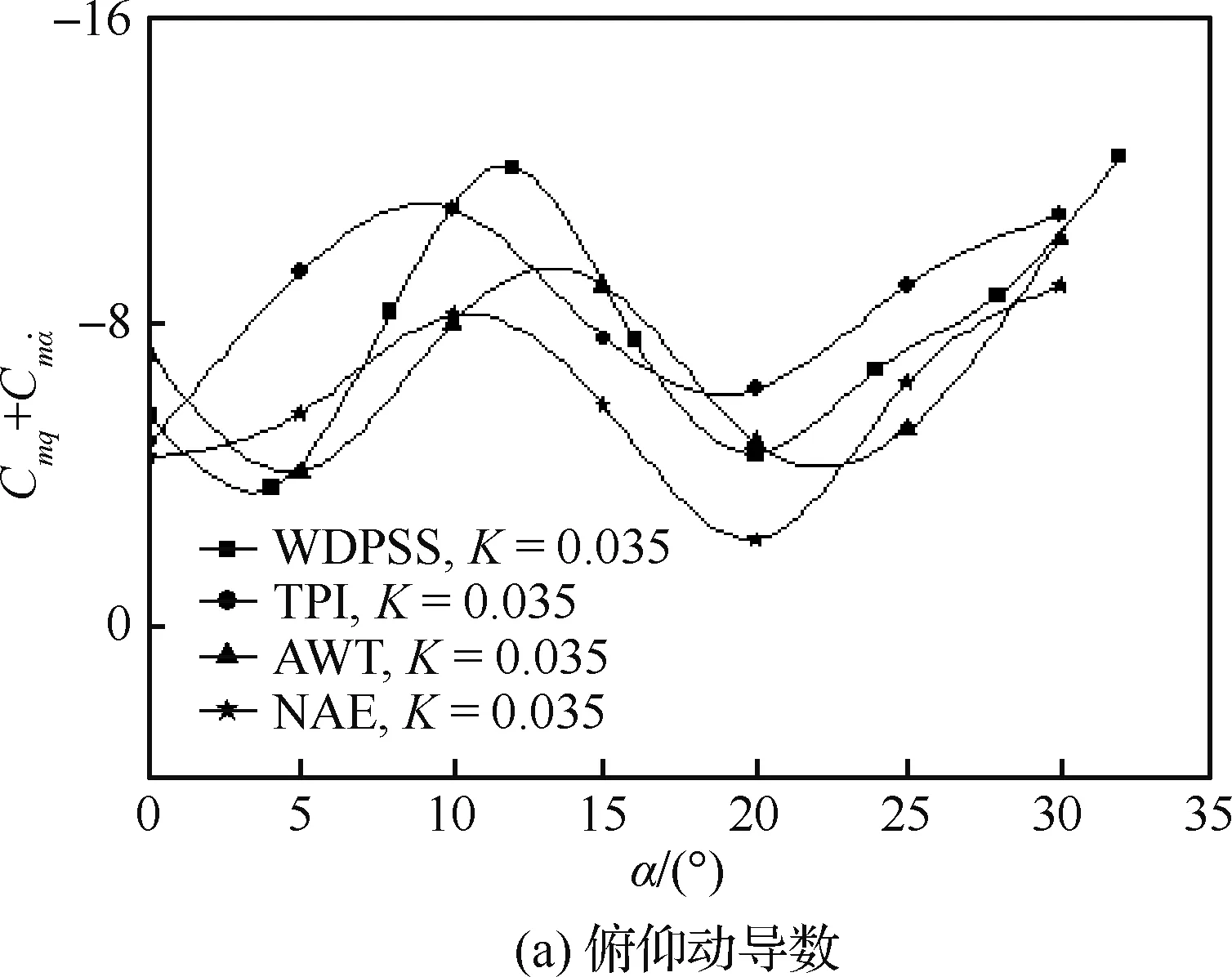
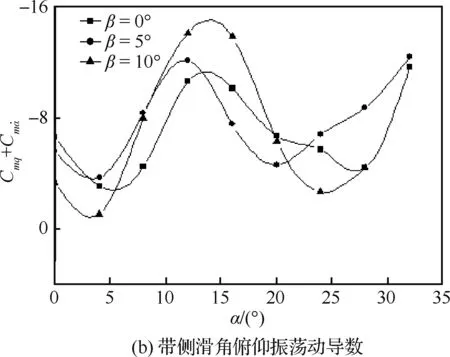
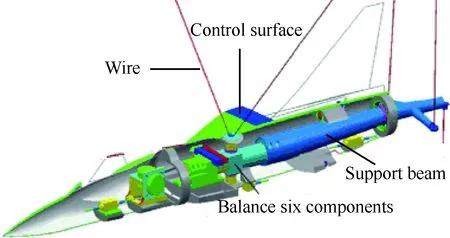
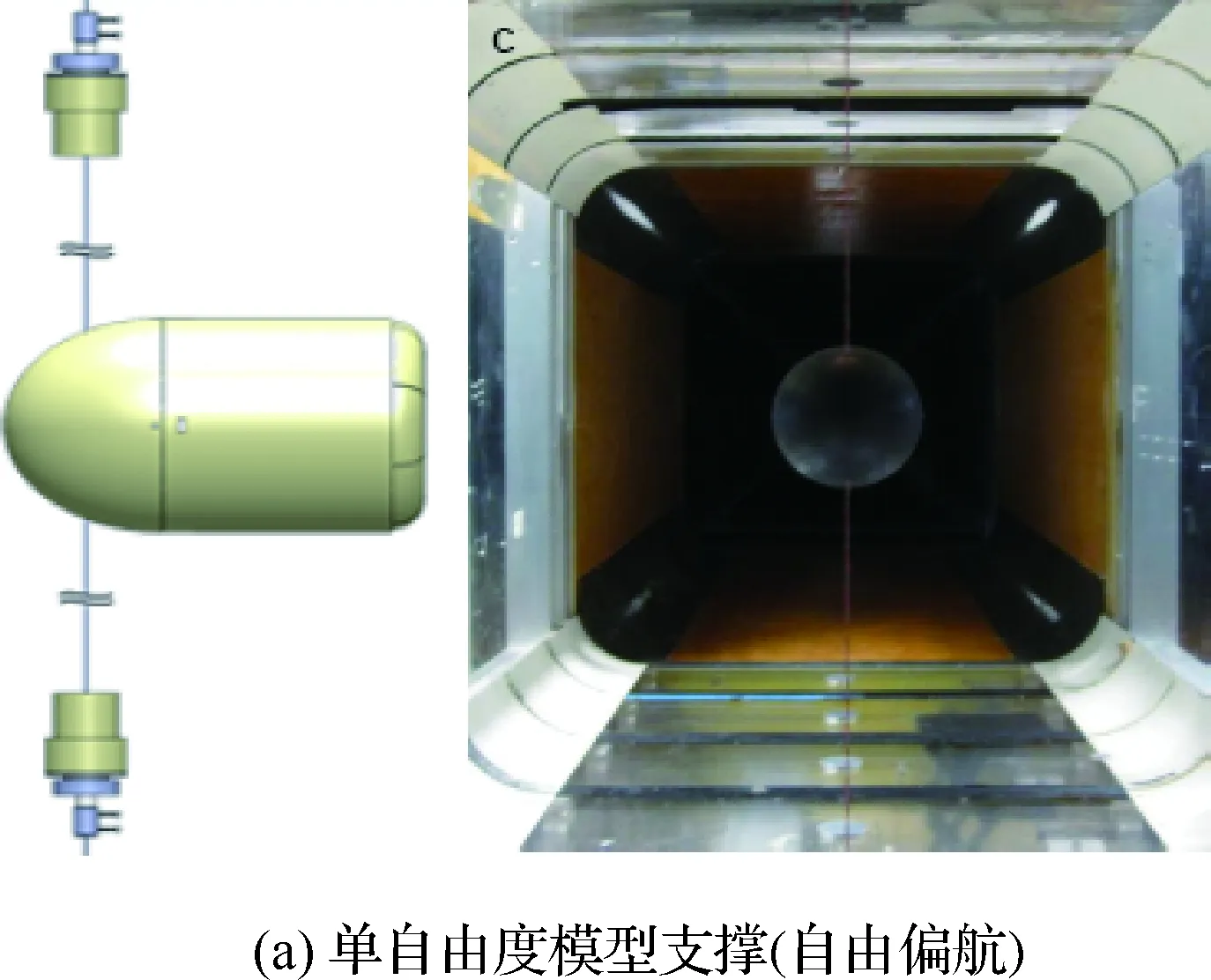
由绳牵引并联机构基本理论可知[49],考虑到牵引绳只能承受单向拉力,n自由度绳牵引并联机构至少需要m(m≥n+1)根绳牵引。而根据自由度数与绳索数量之间的关系,可进一步将绳牵引并联机构分为冗余约束(m>n+1)、完全约束(m=n+1)和欠约束(m 其中,冗余约束和完全约束两类系统只能实现强迫运动,即只能通过调整绳长控制飞行器模型的运动轨迹,目前将绳牵引并联支撑应用于风洞试验中的多属于冗余约束系统,但它们一般只用来研究给定运动条件下的非定常气动力特性,如通过小振幅振荡预测飞行器的动稳定性、通过单自由度俯仰运动来研究动态失速等,应用范围比较局限。而欠约束绳牵引并联支撑系统的特点恰恰在于当给定绳长时,飞行器模型仍然可动,其位姿不完全确定,留有一定的自由度。换言之,欠约束绳牵引并联支撑系统能够释放一定的自由度,在给定初始运动指令或通过操纵飞行器舵面,就可以实现某些方向上的自由运动或强迫+自由运动,能够充分体现飞行器的气动、运动、控制耦合特性,更接近真实飞行状态,这无疑在某些特种风洞试验方面具有很大优势。 冗余约束绳牵引并联支撑系统应用于风洞试验主要是实现飞行器模型的单/多自由度运动,以满足典型动态试验的要求,如动导数试验、大迎角大幅值振荡试验、升沉俯仰振荡等。 文献[51]针对冗余约束绳牵引并联机构的若干关键技术进行了综述,初步分析了以下几方面:结构设计、运动学及性能分析、静刚度分析、运动控制和力控制等。为满足风洞试验的要求,具备高精度运动与试验测量的能力,冗余约束绳牵引并联支撑系统需要攻克诸多关键技术,包括运动学建模、工作空间、系统刚度与振动特性、运动控制、位姿测量与估计,以及气动力测量等,相互关系如图19所示。 图19 绳牵引并联支撑技术示意图Fig.19 Sketch of wire-driven parallel suspension technologies 由图19可知,通过对绳牵引并联支撑系统的机构运动学与动力学分析,为飞行器模型的测量与控制做好准备,而后者形成闭环,提高了系统的精度与鲁棒性。 3.1.1 运动学建模 冗余约束绳牵引并联支撑系统运动学建模关键是构建绳长与飞行器模型位姿之间的几何关系,具体包括运动学正问题,即通过绳长确定飞行器模型位姿;运动学逆问题,即通过飞行器模型位姿确定绳长。考虑到牵引绳的特性,并根据飞行器模型重量、尺寸,可分为3类情况:① 不考虑弹性,当弹性变形引起的飞行器模型位姿误差满足精度要求时可忽略该因素的影响[52];② 只考虑弹性不考虑绳质量,适用于绳质量较小,不计其惯性力的情况[52];③ 既考虑弹性又考虑绳质量,即绳的垂度,如绳索跨度大的支撑系统[53]。根据绳牵引并联支撑系统在风洞试验中的应用,绳的跨度较小,且与飞行器模型相比,质量较轻,因此可以简化只考虑绳的弹性因素。 此外,为提高运动学模型的精确性,还需要考虑绳与滑轮连接点的时变特性对绳长、模型位姿的影响,以及有些参数的不确定性,如传动摩擦系数等,具体可以通过标定技术[54-56]或对雅克比矩阵进行在线辨识[57]等方法,以提高运动参数的精度。 3.1.2 工作空间 针对绳牵引并联支撑系统在风洞试验中的应用,在满足机构运动约束条件的基础上,如何分析和优化有效工作空间,避免绳索虚牵,以及绳索与飞行器模型之间发生干涉,将是进行风洞静态试验与动态试验的前提。整体而言,有效工作空间必须满足以下两个条件[58]: 2) 几何干涉约束条件,具体包括绳与绳之间的最短距离大于某设定值,以及绳与飞行器模型之间的夹角大于某临界值。 基于力封闭和几何干涉约束条件,根据凸集理论,将凸锥的定义推广至多维空间,可计算得到支撑系统的工作空间,即在满足模型所受合力为零且每根绳的拉力均大于零的条件下,去除几何干涉情况。换言之,可将其转化为满足以下条件的所有位姿的集合:由雅克比矩阵J定义的凸包co{J1,J2,…,Jm}包围原点且剔除几何干涉的区域,具体可以采用超平面矢量投影法或雅克比矩阵零空间法进行求解[59-62]。 此外,根据不同风洞动态试验的实际要求,如超大迎角“眼镜蛇”机动等,可以改变绳系布局方案,进而有效改进飞行器模型的运动空间。 3.1.3 系统刚度与振动特性 绳牵引并联支撑系统的刚度与振动特性是设计过程中必须要考虑的问题。系统刚度是指飞行器模型在外力作用下,抵抗质心运动的能力。它是绳牵引并联机构的一项重要设计指标,决定了机构在承受负载(尤其是气动载荷)情况下,系统的稳定性、振动特性以及动态响应特性。 支撑系统的静力学方程可表示为 W+JTT=0 (1) 式中:T为绳拉力矢量。对式(1)进行变分,可推导得出系统的刚度矩阵K为[63-64] K=G(u,T)+JTKsJ (2) 式中:G(u,T)为雅克比矩阵求导项;u为绳长单位矢量,与飞行器模型位姿有关;Ks为绳的抗拉刚度,与绳的弹性模量有关。 由式(2)可知,系统刚度矩阵不仅取决于牵引绳的拉力与抗拉刚度,还与支撑系统的设计参数,包括牵引绳的几何布置、飞行器模型的运动位姿等参数有关。目前,大多研究系统的静刚度,结合机构布局与绳拉力等参数的优化,对系统动刚度的分析仍将需要继续关注。 进一步,考虑系统的无阻尼固有频率,有 |K-ω2M|=0 (3) 式中:ω为系统固有频率;M为系统惯性矩阵。文献[36-37]分别针对大尺度的X-51A模型以及尖锥标模,在一定的机构参数和绳拉力作用下,进行了刚度与固有频率分析。结果显示与传统的尾部支撑方式相比,绳牵引并联支撑具有较好的刚度,以及较大的固有频率。 此外,考虑到绳牵引并联支撑系统在风洞试验中应用的特点,需要分析系统的流致振动响应特性,包括牵引绳的振动,以及对飞行器模型振动产生的影响。针对绳索的空气动力问题,文献[65-69]深入研究了其流致振动特性,包括考虑摩擦和黏性阻尼等影响的涡激振动,以及与雷诺数相关的阻力失稳等,通常采用流固耦合方法数值求解相互作用力和变形。文献[70]基于ANSYS-CFX软件,针对风振影响下单长索的全结构三维模型流固耦合效应进行了多参数模拟分析。文献[71] 通过经验公式分析了牵引绳的涡激振动问题,初步研究了牵引绳与飞行器模型的耦合振动,给出了特定条件下绳振动导致的飞行器模型位姿偏差以及绳拉力变化。但综合不同绳直径、弹性模量以及来流速度等参数,如何定量分析牵引绳的流固耦合以及支撑系统的耦合振动问题仍需深入研究。 3.1.4 运动控制 由于现代飞行器的精益设计对风洞试验数据的精准度要求越来越高,而气动参数如静导数、动导数等都与飞行器模型的位姿紧密相关,因此需要对其运动位姿进行精准的测量与控制。绳牵引并联支撑系统实质上是复杂的强耦合、多输入多输出、非线性时变系统,要实现飞行器模型的高精度多自由度运动,其动力学建模与控制是关键。基于牛顿-欧拉法,可以构建系统动力学模型,其矩阵形式可表示为[63] (4) 基于式(4),可以进行系统动力学分析与控制研究。绳牵引并联支撑系统的控制策略可以分为两类,即连接空间或驱动空间的控制,以及任务空间的控制。在第1种控制策略中,被控量是绳索的长度或驱动电机的转角。如Fang等基于绳索长度,采用非线性前馈控制方法,并对张力进行最优分布,以补偿动力学误差[72]。对该类控制策略而言,尽管绳索的长度或电机的转角可以由编码器测量,进而通过正运动学分析得到模型的位姿,但由于绳索的柔性以及正运动学方程解的不确定性将导致位姿精度降低,并限制了控制器的带宽。在第2种控制策略中,被控量是模型位姿。如Chellal等针对索并联机构采用基于视觉测量的串级控制方案,其中力控制保证绳索张力的合理分配,位置控制保证定位精度,但只是运动学控制,未考虑系统的动力学特性[73]。文献[74]针对用于射电望远镜粗调系统,提出了一种Fuzzy-PID控制和干扰观测器相结合的控制算法来实现馈源轨迹跟踪策略。文献[63]针对已构建的原理样机,实现了半闭环运动学控制,并采用基于刚度优化的内力前馈与PD反馈控制方法,进行了控制性能分析;在此基础上,文献[75]提出了一种连续非奇异终端滑模控制方法,并进行了仿真验证。 由上述可知,基于绳索长度或电机转角反馈的控制策略属于半闭环控制;采用视觉测量以位姿为反馈量的控制策略虽是全闭环,但文献[57,73]仅实现了运动学控制,还未实现系统的全闭环动力学控制。因为运动学控制不基于系统的动力学模型,没有考虑非线性及耦合等特性,导致控制器的实际性能不高。特别是在飞机模型快速动态变化情况下,非线性动力学特性更加明显,运动学控制器不能满足性能需要,出现运动不稳定的现象。此外,在控制器设计时应考虑绳索张力的动态变化,将张力和位姿混合控制。尤其在试验来流作用下,应避免飞行器模型运动过程中牵引绳松弛发生“虚牵”现象,否则将严重影响气动参数的测量结果。同时,系统运动学参数如绳索与滑轮接触点位置变化、绳索弹性对计算长度的影响等都会引起雅克比矩阵的不确定性,将导致系统鲁棒性能变差。因此,设计具有鲁棒性且考虑系统动力学特性的力位混合控制器是关键。 值得注意的是,在控制率设计过程中应对绳拉力进行动态优化,尽管有文献采用线性规划、二次型规划等方法[76-79],但却存在绳拉力不连续,以及计算时间较长等不足。结合绳索的振动响应,在满足系统刚度要求的前提下,采用快速连续性的优化算法仍将是研究重点。 3.1.5 位姿测量与估计 在风洞试验中,飞行器模型的位姿测量精度直接影响气动参数的精准度。对绳牵引并联支撑系统而言,它还影响模型的运动控制精度。因此,高精度的位姿测量与估计是获得准确可靠的气动特性试验数据的基础。 结合绳牵引并联支撑的特点,非接触测量是一种有效的手段。目前,国内外研究机构已发展了激光光栅法和视觉(视频)测量方法[80-81],其中因为视觉测量技术对模型设计无特殊要求,受到风洞试验机构的青睐,已成为研究热点。国外,美国从20世纪末开始研究该项技术,现已应用于各种低速、高速、超高速风洞试验模型的姿态角测量[82]。国内,中国空气动力研究与发展中心等多家单位开展了姿态角视觉、视频测量技术,迎角实测精度可达0.01°[83]。厦门大学采用机器视觉测量技术,使用单目、双目相机,将其针对性地应用于飞行器模型的位姿测量,目前已能够获得较高的测量精度[84]。 为保证动态测量的实时性,还需对测量位姿进行估计,可以采用多种滤波方法[85],如基于贝叶斯状态估计理论的粒子滤波,通过对运动目标图像和特征的提取与配准,可以实现对模型状态的预测与更新。目前,基于三维图像的视觉测量与估计技术已有较大发展,例如基于RGB-D(Depth)相机,结合平面图像与深度信息,通过配准与优化可以得到被测对象的位置和姿态[86-87],且具有较高的精度与效率,这将为风洞试验飞行器模型位姿的测量提供一种有效手段。 总之,结合绳牵引并联支撑在动态试验中的具体应用,如何保证测量的精度以及实时性仍将是值得关注的关键问题。 3.1.6 气动力测量 常规风洞试验的目的是获得飞行器模型的空气动力载荷,通常采用六分量天平直接测量作用在模型上的力和力矩。针对绳牵引并联支撑在风洞试验中的应用,测量气动力的关键是进行内置六分量天平设计。文献[35]提出“模型-天平-支杆”一体化设计方案,如图20所示,包括模型、天平、套筒和支杆4大组件,天平两端分别固连前锥套和后锥套,前锥套固连于模型,后锥套固连于套筒;支杆也固连于套筒,用于连接绳索。套筒、支杆与模型之间无接触,模型仅通过前锥套与天平接触固连。这样天平所测得的载荷即是通过模型传递的,与套筒、支杆无关。 图20 SDM内置六分力天平示意图[35]Fig.20 Sketch of internal six force balance for SDM 除了内式六分量天平测量方法,鉴于绳牵引并联支撑的特点,基于系统静力平衡方程,可以通过吹风前后绳拉力的变化解算飞行器模型受到的气动力及力矩,具体可以表示为 (5) 式中:Fe、Me分别为模型在吹风试验时所受的气动力和气动力矩;T0和TW为吹风前后绳系的拉力矢量;Fex、Fey、Fez分别为模型所受的阻力、侧向力及升力;Mex、Mey、Mez分别为流场作用在模型上的滚转力矩、俯仰力矩及偏航力矩。文献[21,34]已采用上述方法通过试验验证得到气动力参数,结果显示是合理正确的。 文献[36]进一步提出,在进行风洞动态试验时,基于系统动力学方程,气动力参数可由式(6)求解: (6) 式中:ΔT为吹风前后的绳拉力变化。式(6)意味着通过对绳拉力的监测,以及模型运动位姿的测量,可以使得复杂的气动/运动耦合问题解耦,进而得到模型所受的气动参数。 除上述关键技术外,在实际风洞试验应用时,还需考虑绳索与飞行器模型之间的连接问题,尤其在高速、超声速来流下,气动力和绳索张力均变大,应避免连接处应力集中被拉断。此外,如果吹风时间较长,还需考虑超声速来流导致的高温对绳索材料的影响,包括强度和绳拉力特性等,并依据此分析选择性能更优的材料。 目前,笔者只查到文献[21,35]公开发表了绳牵引并联支撑风洞试验的相关成果。为更具普适性,这里以SDM标模为例进行说明。文献[35]在某开口式直流低速风洞进行动态试验,均匀流速范围达5~80 m/s。为确保SDM模型处于风洞试验段中心流场区,实际样机装配如图21所示,其中图21(b)为大迎角状态。 图21 绳牵引并联支撑风洞试验Fig.21 Wire-driven parallel suspension in wind tunnel test 图22 绳牵引并联支撑SDM标模动态试验结果Fig.22 SDM dynamic test results of wire-driven parallel suspension 此外,根据对绳牵引并联支撑系统的工作空间和刚度分析,对系统进行重构,还进行了大角度的“眼镜蛇”机动动作,如图23所示,t为动作时间。由试验过程可知,支撑系统即使在大迎角机动情况下仍保持了较好的稳定性。 图23 绳牵引并联支撑Cobra机动试验Fig.23 Cobra motion test with wire-driven parallel suspension 由第3节可知,冗余约束绳牵引并联支撑技术发展相对成熟,而在欠约束方面的研究相对较少,主要是由于其约束不足、刚度低,以及运动几何与静力学、动力学存在耦合等,限制了它的应用,但这也意味着欠约束绳牵引并联机构具有高度的灵巧性与自适应性。考虑到风洞试验在自由运动、强迫+自由运动以及气动/运动/控制耦合等方面遇到的技术瓶颈,采用欠约束绳牵引并联支撑是一种理想的选择。 目前,关于欠约束绳牵引并联支撑在风洞试验中的应用,比较相关的有法国ONERA在立式风洞中采用这种支撑方式,通过控制每根绳的拉力,利用其合力来模拟发动机的推力,以实现自由飞行试验。该风洞已具备此功能,可以为研究飞行器或操纵面运动与气动力之间的耦合关系提供试验基础[88]。其中飞行器模型包含3个操纵控制面,但需结合具体的欠约束构型,并进行试验规划才能够使用。图24为此项目采用的飞行器模型与支撑结构示意图[88]。此外,该项目还提出了一种力位混合控制方法,可以实现在某些自由度上的受迫运动,以及剩余自由度上的自由运动,但根据公开文献,上述两部分均未涉及具体的绳系布置方式。 美国乔治亚理工大学采用一种两根绳支撑方式,重点研究了低速来流时单自由度轴对称体的自由响应,多个射流激励器作用下近尾迹流场结构,以及基于振动位移测量的开/闭环流动控制器对气动力的影响[22]。支撑系统如图25(a)所示,其可以实现自由偏航转动。该支撑方式要求试验模型重量较轻,钢丝绳预紧力可通过电机或螺栓进行调节。此外,他们还提出了一种三自由度自由转动模型支撑机构,如图25(b)所示,以研究不同流动控制方法对自由运动的影响。但该机构主要采用一根前置杆与万向节实现自由运动,与欠约束绳牵引支撑方式相差较大。 图24 飞行器模型和支撑结构[88]Fig.24 Aircraft model and structure of suspension[88] 图25 自由运动模型支撑结构[22]Fig.25 Structure of model suspension with free motion[22] 欠约束绳牵引并联支撑技术应用于风洞动态试验,主要是进行自由运动,即在不改变绳长的条件下,受外力作用或操纵舵面,飞行器模型在解锁自由度上运动;以及强迫+自由运动,即在外力作用下同时控制绳长变化,在约束自由度上按照指定轨迹运行,在解锁自由度上自由运动。其关键技术问题虽与冗余约束有共性之处,但亦有区别,其中有两个问题需要重点解决,即系统的动态特性与控制技术。 4.2.1 系统动态特性 从本质上讲,其动态特性主要研究飞行器模型位姿与绳长、绳拉力之间的内在关系,以及振动特性等。与冗余约束支撑系统不同,欠约束支撑系统由于绳数量小于自由度数,导致几何方程与力平衡方程相互耦合,必须联合求解才能确定位姿、绳拉力等参数,这属于运动学范畴,包括正问题和逆问题求解等两个方面。目前,相关文献比较有限。其中,Abbasnejad和Carricato针对欠约束绳牵引并联机器人的运动学进行了归纳和总结,指出在给定绳长时末端执行器仍然保留一些自由度,并提出采用同伦算法求解正几何静力耦合方程组[89]。Carricato和Merlet重点分析了欠约束绳牵引并联机器人的稳定性,通过虚功Hessian矩阵对静态平衡稳定性进行评估,并进一步研究了3根绳牵引的欠约束并联机器人的逆几何静力问题[90]。Berti等提出基于区间分析法,以解决欠约束绳牵引并联机器人的正几何静力问题[91]。国内,仅有文献[92-93]分析了欠约束并联机构的工作空间和静刚度特性。 针对其在风洞试验中的应用,运动几何动力耦合问题,即系统的动力学机理仍不够清楚,缺乏飞行器模型动态位姿与绳长、绳拉力之间的内在关系。尤其,风洞试验来流会引起支撑系统振动,进而可能导致绳索虚牵,影响模型运动特性。尽管有文献[94]通过风洞试验方法,得到了来流作用下单根绳索的动力学响应特性。但针对多绳牵引支撑系统,在绳索运动、不同预紧力情况下,流致振动问题仍需深入研究,否则将严重影响飞行器模型运动控制的精度和鲁棒性。因此,充分研究欠约束绳并联支撑系统的动态特性是应用于风洞试验的关键。 4.2.2 系统控制技术 为了实现飞行器模型的自由运动,或强迫+自由运动,欠约束绳牵引并联支撑系统的控制是关键。对于自由运动控制,主要指通过外力作用或操纵舵面,考察模型的自由运动特性。对于强迫+自由运动控制,主要指调整绳长实现约束自由度上的强迫运动,同时保证绳索始终张紧,抑制绳索振动。 关于欠约束绳牵引并联支撑机构控制问题,Yamamoto等基于逆动力学和绳拉力约束条件,对三绳牵引的欠约束并联机器人进行精确线性化,完成轨迹控制仿真和实验验证[95]。Heyden和Woernle针对运动学不确定绳牵引机构,基于微分平滑理论进行系统反馈控制[96]。Hwang等通过系统固有频率分析,基于前馈的输入整形方法,对欠约束绳牵引并联机构轨迹控制中的振动进行抑制[97]。Barbazza等针对平面欠约束绳牵引宏-微机器人,采用微分平滑方法和多目标优化设计控制率,实现了点到点运动控制[98]。国内,Zhang和Shang提出了一种几何方法对欠约束三自由度绳牵引并联机构进行轨迹规划,但未涉及控制[99]。由上述可知,虽然文献[95-96]研究了轨迹控制问题,但由于其一般用于运输/装卸行业,通常只实现简单轨迹控制,如点到点运动等,而且所受干扰小,控制要求不高。因此,对风洞试验欠约束绳牵引并联支撑系统而言,无论是对自由运动的控制,还是对强迫+自由运动的控制,考虑绳系振动与来流干扰等因素,设计有效的控制器对后续试验测量与分析均具有重要意义。 基于绳牵引并联机器人技术的冗余(欠)约束系统可为风洞试验提供一种新的支撑手段。综合该技术的研究现状与关键问题分析,其发展趋势可归纳为两个方面: 1) 可重构。针对新一代战斗机、直升机、导弹等飞行器对试验技术开发和验证的迫切需求,开展风洞试验模型通用支撑技术研究具有重要的工程应用价值。绳牵引并联支撑技术应具有可重构性或自适应性,具体包括离线重构和在线重构[100-102],即根据对系统刚度与有效工作空间等要求,以及绳拉力、几何干涉等约束,以系统能量消耗或灵敏性为指标,对绳牵引并联支撑系统的布局进行优化设计,最终满足不同飞行器模型的试验要求。其中,在线重构技术的发展将会进一步提升绳牵引并联支撑技术的水平。 2) 智能化。为进一步提高风洞试验的运行效率和精度,绳牵引并联支撑智能化将是发展的一个重要方向。主要基于系统动力学机理与稳定性研究,结合计算机视觉测量技术,如采用三维图像信息处理与运动估计,提高飞行器模型的位姿测量精度与实时性;采用先进理论算法与智能控制方法,合理规划飞行器运动轨迹,实现飞行器模型的自适应鲁棒控制。 结合中国风洞试验的实际需求,该技术有望应用于多种情况,如可自主调节支撑系统刚度和频率,作为软支撑方式用于气动弹性试验;采用欠约束支撑,释放某自由度,进行气动/运动耦合分析试验,特别是在有舵面指令的情况下,可进一步验证飞行控制率等。总之,绳牵引并联支撑技术有望进一步扩展风洞试验能力,提高风洞试验的运行效率,提升风洞装备水平。3 冗余约束绳牵引并联支撑技术
3.1 关键问题分析

3.2 低速风洞试验成果


4 欠约束绳牵引并联支撑技术
4.1 研究现状

4.2 关键问题分析
5 总结与展望
